适应弧形壁面运动的爬壁机器人设计
2020-12-23任志奇霍文胜
任志奇 霍文胜
(华北电力大学,河北保定071003)
0 引言
爬壁机器人是移动机器人研究领域中的一个重要分支,属于特种作业机器人,可以替代人在高空危险环境下作业,在许多行业有着非常广泛的应用前景,如检测、消防、反恐侦查、清洗除锈、喷漆等领域。它结合了吸附技术、移动技术和控制技术,可附着在垂直或者倾斜的壁面上爬行,在运动过程中可以在机器人身上安装辅助设备以完成一定的作业任务,极大地拓宽了机器人的应用范围。
本文主要研究设计了一种轻量化的爬壁机器人,它能适应一定曲率半径范围的曲面。将其作为基本的载体应用到各个领域,可以根据作业环境的不同,搭载不同的设备来完成特定任务,具有重要的实践意义。
1 爬壁机器人的结构设计
爬壁机器人在壁面上运行时,需利用吸附力使机器人与壁面产生静摩擦力,从而避免自身重力造成跌落的可能性。机器人的机械结构主要包括:机身主体、驱动机构、吸附系统和行走机构。吸附系统是爬壁机器人的核心,机身主体是基础,驱动机构是必需结构。利用三维建模软件Pro/e对机器人的总体结构进行设计,提出一种基于负压吸附、单吸盘式、三轮支撑运动的爬壁机器人,通过离心风扇产生足够的吸附力,吸附在垂直或者倾斜壁面上运行,爬壁机器人总体结构如图1所示。
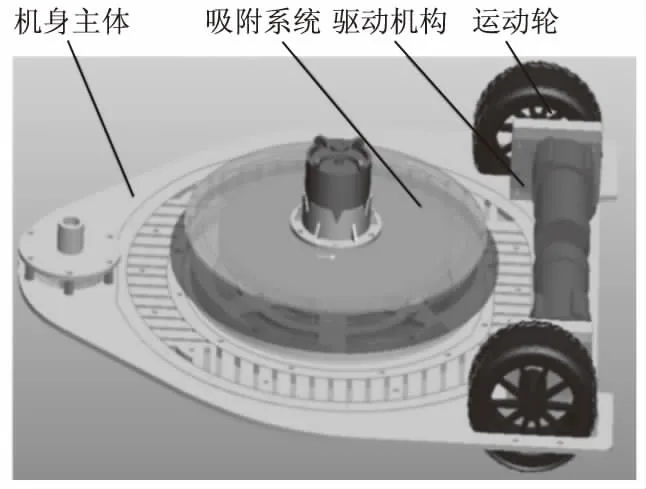
图1 爬壁机器人总体结构
机器人在工作过程中始终需要自身提供吸附力,此吸附力可等效看作是对机器人施加的垂直于壁面的正压力,从而与壁面产生静摩擦力,保证机器人稳定运行。爬壁机器人要适应不同平面和曲面的特殊性,本文设计的爬壁机器人采用单吸盘式负压吸附结构。吸附结构由无刷电机、离心风机叶轮、密封装置、密封裙等组成。其中,离心式风机叶轮在高速旋转做功过程中,首先将机器人密封吸盘内的气体排出,使得吸附腔内压力低于外界大气压,在内外压差作用下外部大气经过密封组件与壁面之间的缝隙进入机器人本体腔内,然后低压气流再次被叶轮送出到腔体外,最终形成一个循环系统,能始终保持吸盘内部较为稳定的“负压”。
爬壁机器人选用“2个驱动轮+1个从动轮”来实现支撑和运动,其中从动轮为万向轮。相比于四轮运动机构,三轮运动方式能更好地适应曲面,同时运行也更加稳定。机器人的设计主要针对爬行的表面区域是凸出壁面,在任意位置时,机器人都能很好地吸附在壁面上,防止轮子打滑。相比一般的爬壁机器人将密封机构布置于运动轮的外侧,本文设计的机器人密封机构布置于支撑轮内侧,密封裙能够更好地贴合壁面,适应凸出的曲面。本设计选用降落伞布包裹低密度弹性海绵作为组合密封裙,低密度弹性海绵作为填充物,能减小运动阻力,同时能适应不同的工作表面;降落伞布的摩擦系数小,有效减小了运动阻力,同时良好的耐磨性能可延长密封裙的使用寿命。
驱动机构包括直流减速电机、减速器和驱动轮,通过产生驱动力并传递到驱动轮上,驱动机器人在壁面运动。驱动机构采用双轮单独驱动的机构形式,结构简单;机器人在转向过程中,可以利用差速驱动,控制两轮的转速、大小,在极小的转弯半径下实现转向。
2 爬壁机器人对曲面的适应性分析
爬壁机器人对弧形壁面有一定适应性,影响适应能力的主要因素有车轮与底板的垂直距离和车轮之间的距离。曲率半径示意图如图2所示。
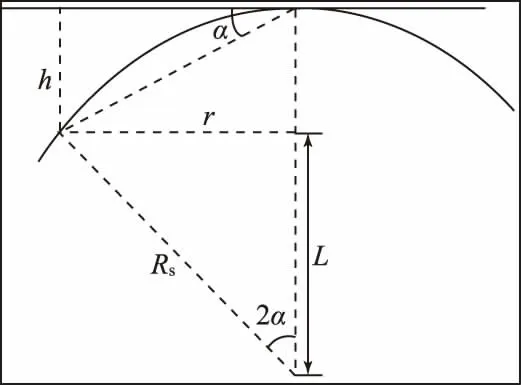
图2 曲率半径示意图
如图2所示,h为轮子距底板的高度,Rs为曲面的曲率半径,r为轮子接触点到轴线的距离。由几何知识可知:

由空间几何关系可知,r和h为已知,爬壁机器人的底板高度需满足条件:

联立式(1)、式(2),可得爬壁机器人工作曲面的曲率半径条件为:

3 吸附系统的流道仿真
该爬壁机器人设计的离心风扇的流道模型较为特殊,要去除动叶轮模型部分,首先需要建立离心风扇流道的三维模型,主要包括进风口流道、叶轮流道以及出口流道。将保存的风扇模型导入Gambit软件中,采用非结构网格划分方法进行网格划分,选择Fluent5/6求解器,共产生154 856个网格。
在离心风扇三维流场模拟中,将生成的网格文件导入FLUENT软件中,先建立两处交接面:选取进口流道断面和叶轮流道断面重合的边界,叶轮流道圆周边界和蜗壳流道内侧边界,并进行网格检查。对风扇流道进行数值模拟,初始条件设置为大流量、高转速情况,转速为10 000 r/min,仿真计算得出结果。
风扇流场截面的全压等于动压与静压之和。选取离心风扇叶轮的中间截面,全压等于出口气体全压与入口气体全压之差,且全压在各叶轮之间也呈对称分布。气体在刚进入旋转叶轮的流道区域压强较低,进入负压腔的空气迅速向四周扩散,造成风扇流场中心区域气压较低,且与风扇叶轮内部有明显的边界。设计人员通过分析流场内部的全压可以预测风扇的性能。
4 爬壁机器人吸附实验
设计人员通过加工制作机器人的零件并进行装配完成实验样机,在实验室环境下测试,暂不考虑外部因素(风力、湿度、工作表面清洁程度等)的影响。机器人在表面有2 mm高、3 mm宽缝隙的垂直壁面可以稳定吸附;实验机器人可以稳定吸附于曲面半径约为1 m的圆形壁面,同时实验过程中,当调整爬壁机器人在不同姿态时,都能实现稳定吸附。
机器人吸附能力测试中,将爬壁机器人置于负压吸附力方向与自身重力方向相反的壁面进行测试。经过反复多次测试吸附力得出,该机器人的吸附力约为100 N。
5 结语
本文设计的爬壁机器人的离心式叶轮及流道能产生较高的负压;组合密封裙可以很好地适应弧形壁面,弹性海绵能及时地适应工作表面的变化,始终维持密封腔内部稳定的负压。设计的爬壁机器人能适应一定曲率范围的弧形壁面,为后续机器人适应不同环境进行多任务作业提供了一定参考。
