改进Retinex 无人机图像去雾算法*
2020-12-23许哲,吴琨,黄鹤,黄莺,郭璐
许 哲,吴 琨,黄 鹤,黄 莺,郭 璐
(1.中国电子科技集团公司第二十研究所,陕西 西安 710068;2.长安大学,陕西 西安 710064;3.空军工程大学,陕西 西安 710038;4.西安爱生技术集团公司,陕西 西安 710075)
0 引言
自从四旋翼无人机被提出以来,学者们对其飞行控制技术进行了深入研究,并广泛应用于图像处理领域。利用它的微型摄像头收集图像信息,结合无人机云台共同工作。通过无人机云台控制相机的姿态,能在不同环境下有效完成对图像的采集任务。采集的图像通过无人机图传功能模块实时传给地面无线接收设备,地面接收并对拍摄的图片进一步处理完成相应的任务。四旋翼无人机飞行姿态万千,适应各类境况,能自主起飞和降落,具有垂直起降功能,使其不受狭窄区域限制,可以快速通过不同区域通勤。它能胜任恶劣环境下的工作,有效完成航拍采集图像和图传任务。它重量轻,时效性强,成本低廉。但是,通常无人机飞行高度几十或者几百米近似垂直向下拍摄的情况下受到雾霾的影响,导致采集的图像不同程度上质量下降。航拍图像模糊亟待提出一种有效的实时去雾算法,因此无人机深度学习去雾算法具有重要的研究意义。
1 机载TMS320c6748DSP 平台
TMS320C6748 芯片是业界功耗最低的浮点数字信号处理器(Digital Signal Processing,DSP),具有高能效、使用寿命长、连通性设计对高集成度外设以及低热耗等特点。在具备通用并行端口(Universal Parallel Port,uPP)的同时,它也是TI 首批集成串行高级技术附件(Serial Advanced Technology Attachment,SATA)的器件,可以很好地满足系统的实时性要求。
DSP 可搭载在无人机上进行图像去雾处理,是图像去雾处理模块的核心。在图像去雾处理系统功能验证过程中,要先确保该DSP 工作状态正常,再进行DSP 外设的调试。TMS320C6748 采用JTAG 接口的仿真器,将DSP 启动模式设置为仿真器启动,即8 根BOOT 模式控制管脚的值为00011110。确认设置正确后,上电尝试连接仿真器。通过TI 提供的开发环境代码调试器(Code Composer Studio,CCS)V4 尝试连接仿真器和DSP,利用GEL 文件初始化DSP,发现DSP 能够正常与仿真器建立连接,且DSP 内核和各外设的初始化也能够正常完成,由此验证DSP 的核心硬件电路的工作状态正常。
2 基于Retinex 的图像去雾算法
2.1 Retinex 理论
光线的短波和中长波光线的反射,对物体的颜色具有重要作用。并非是反射光强度的绝对值,而是光在某个波段的反射能力是实物自带的属性,不依赖任何光源。物体的色彩不会被光照的非平均性干扰,而Retinex 为基础具有颜色恒常性。
2.2 算法实现
Retinex 理论提出I(x,y)由照度图像和反射图像组成。前者指物体的入射分量的信息,记为L(x,y);后者指的是物体的反射部分,记为R(x,y)。具体原理如图1 所示。
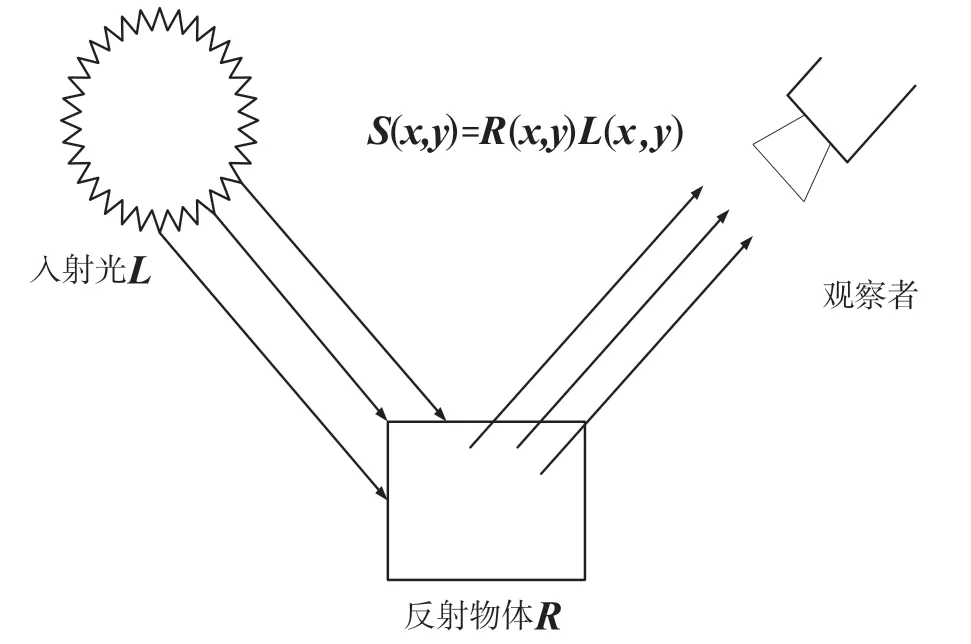
图1 图像成像原理
用式(1)表示图像I(x,y):

反射图像具有图像的本源内容,而照度图像是因外来光线的强弱变化引起的对原始图像的干扰。通过计算照度图像并将其从图像本身中分离出来,可减少照度图像对反射图像的影响,获取图像的本质信息。将上述过程转换到对数域进行处理,可以将复杂的乘法转换为加法:

计算过程中,由于直接计算反射分量r(x,y)较为复杂,因此先计算照度分量l(x,y),再用已知的i(x,y)与计算得到的照度分量l(x,y)相减获得反射分量r(x,y)的值。流程如图2 所示。
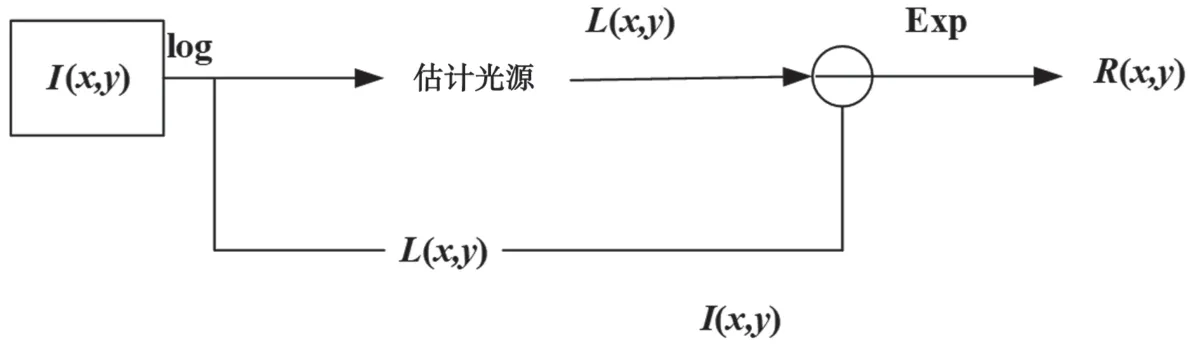
图2 计算反射分量流程
单尺度Retinex 算法的数学形式如下:
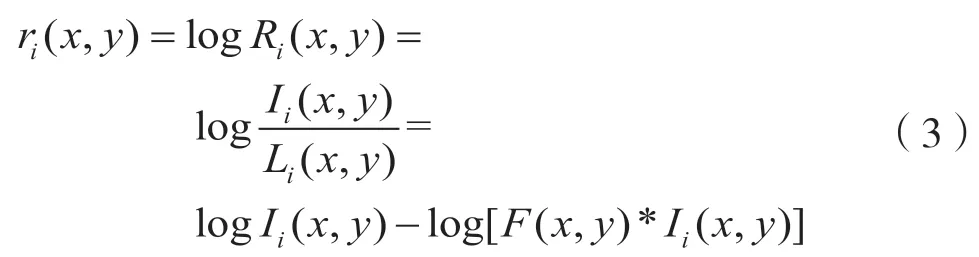
Retinex 算法流程如图3 所示。首先,输入原始图片,确定高斯滤波的半径。其次,对原始图像进行高斯滤波,得到照射分量L。再次,根据式(3)得到反射分量。最后,得到高频增强的对象后取反对数,得到增强后的图像。
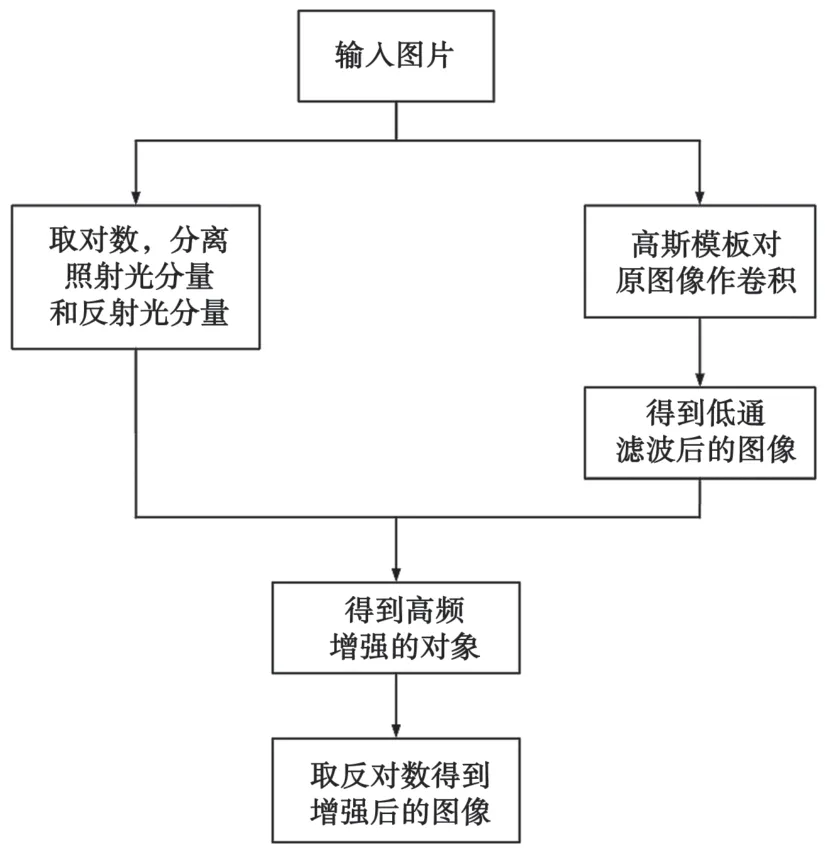
图3 Retinex 算法流程
3 MSR 方法改进Retinex 去雾算法
在SSR 基础上改进的MSR,既能对图像进行动态压缩,又能对图像保持高保真度,且具有颜色恒常性,对色彩有增强作用,具有全局、局部动态范围压缩能力,可用于增强X 光图。
为达到更好的效果,所谓的多尺度视网膜增强算法(Multi-Scale Retinex,MSR)被提出,其中大、中、小3 种尺度最经典,可以在保留一致性色感的前提下,在动态范围内压缩图像。与单尺度比较,Log[R(x,y)]值计算步骤有所不同。
(1)需要对原图进行各个尺度的高斯模糊,得到模糊后的图像Li(x,y),其中小标i表示尺度数。
(2)对各个尺度下进行累加计算:

各个尺度对应的权重用Weight(i)表示,前提是权重综合为1,通常取等权重。
其他步骤和单尺度相比没有区别。
基本的计算原理如下:

式中,I为原始输入图像;F是滤波函数,一般为高斯函数;N为尺度的数量;W为每个尺度的权重,一般都为1/N;R表示在对数域的图像输出。
如图4 所示,算法基本步骤如下:
(1)将原始图像分解为RGB 共3 个通道。
(2)对每个通道进行高斯模糊后应用多尺度Retinex 算法。
(3)对RGB 这3 个通道进行融合,并输出处理后的图像。
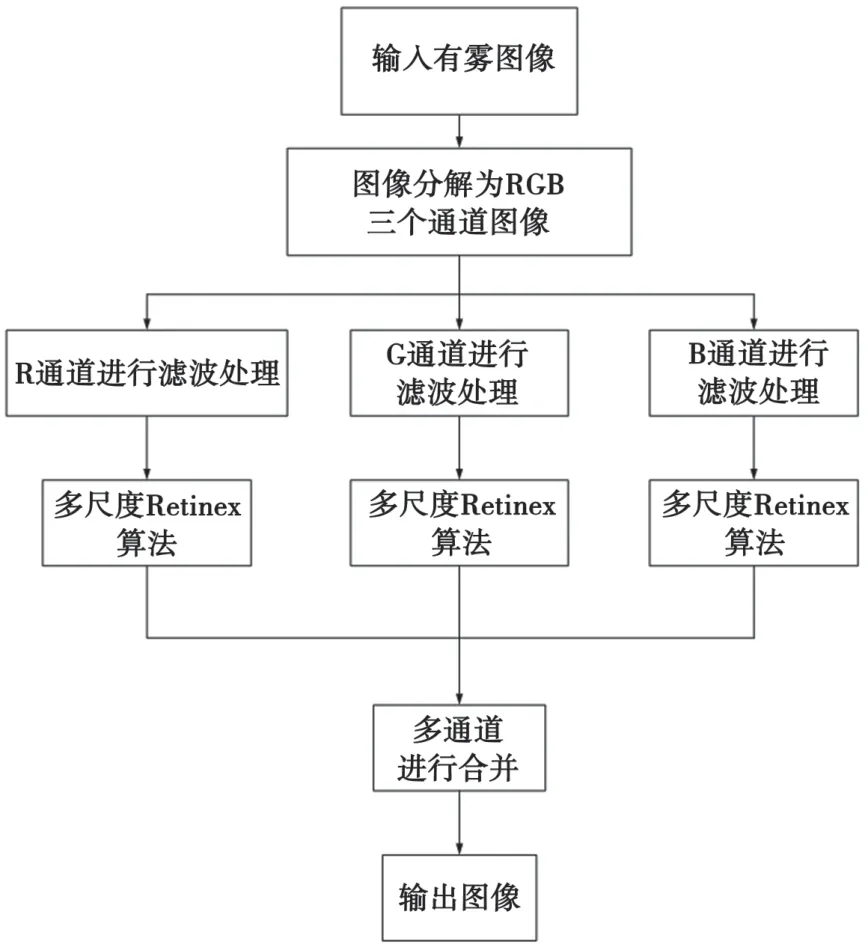
图4 MSR 方法改进Retinex 去雾算法流程
4 CCS 设置
在CCS 实现后,需要在Property 中设置参数,包括图片像素行列数、红禄蓝掩模以及起始地址等。参数的设置正确与否决定着能否正常显示图片。CCS 图片显示参数设置如图5 和图6 所示。
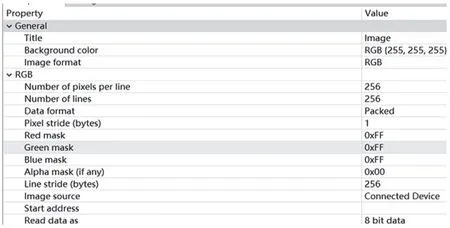
图5 CCS 显示原图参数设置
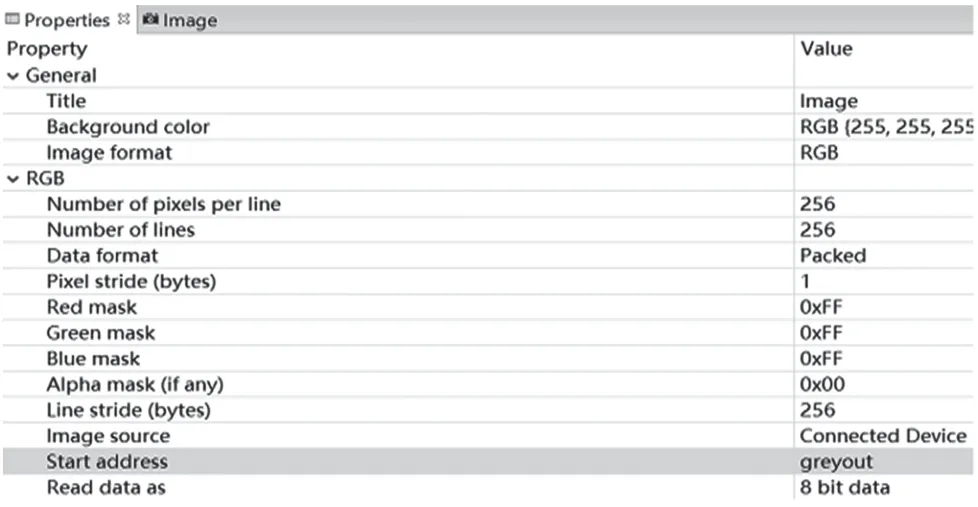
图6 CCS 显示去雾结果图参数设置
5 MSRCR 方法改进Retinex 去雾算法
由于R对数域的输出要转换为数字图像,必须将它们量化为[0,255]的数字图像范畴。这个量化的算法优劣对最终输出的品质起至关重要的作用。采用直接线性量化方式进行处理,即:

算法流程如图7 所示。首先,对输入的图像利用Retinex 算法处理后得到反射分量图像。其次,引入颜色回复因子恢复图像后量化到量化为[0,255]的数字图像范畴。最后,MSRCR 后输出图像后去除噪声得到最终处理图像。
6 实验结果
通过对3 种算法去雾效果的对比可知,图8 基于Retinex 的图像去雾结果为颜色恒常、高色彩保真,去雾结果图像的清晰度与原图像颜色更贴近,视觉效果很好,但存在大量光晕。MSR 实验效果,如图9 所示,整体对比度有所提升,但偏色现象较为突出。图10 中MSRCR 方法对光晕的减弱效果要比MSR 方法好,图像增强效果更佳,色彩更逼真。
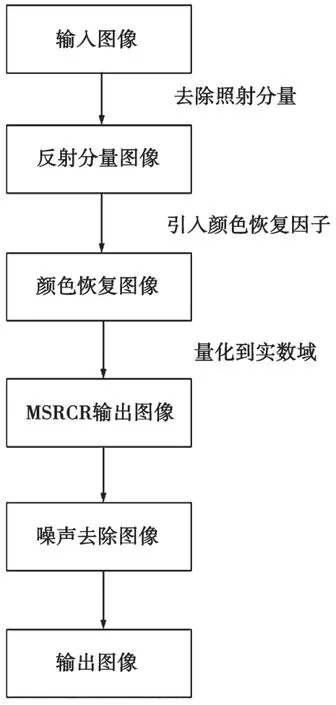
图7 MSRCR 方法改进Retinex 去雾算法流程
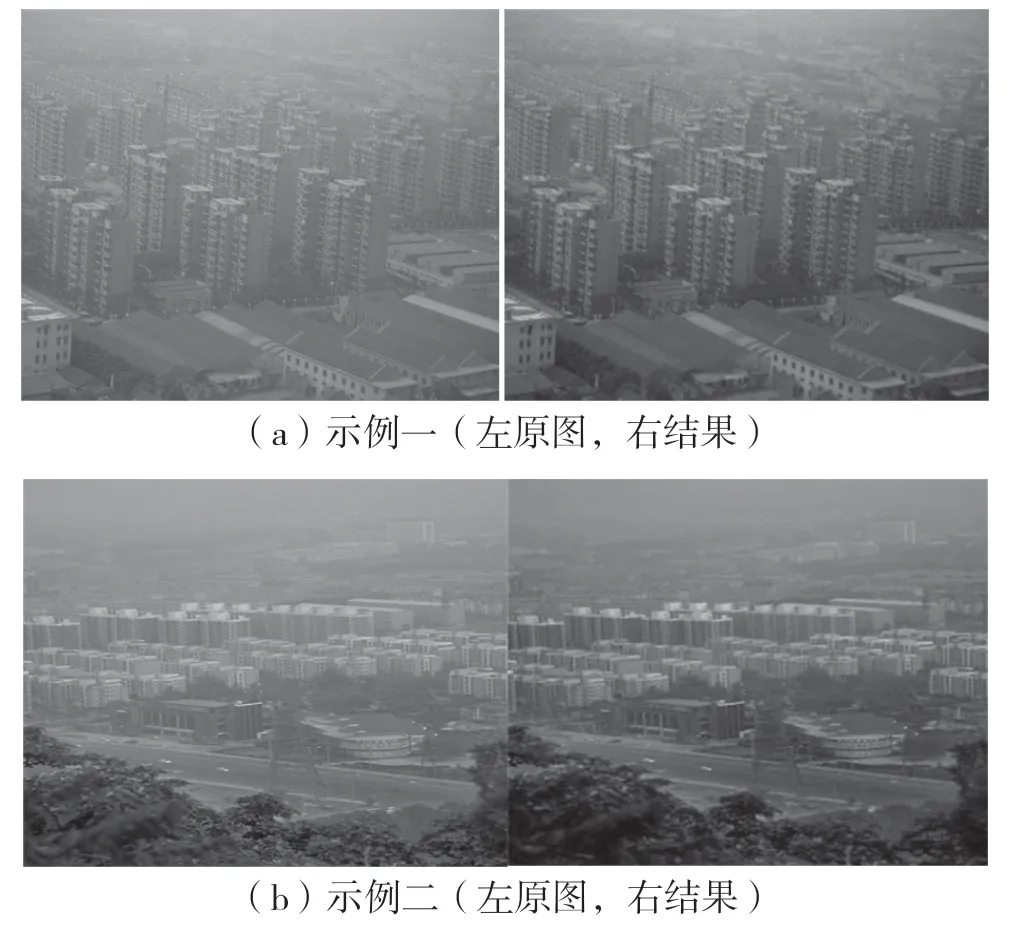
图8 基于Retinex 的去雾算法结果
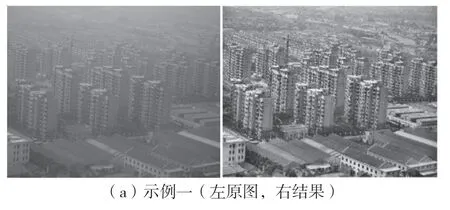
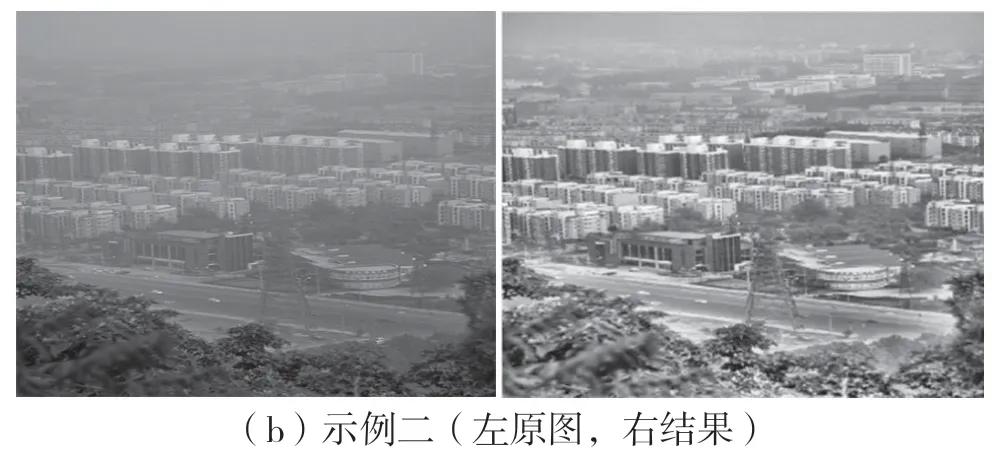
图9 MSR 方法改进Retinex 去雾算法结果
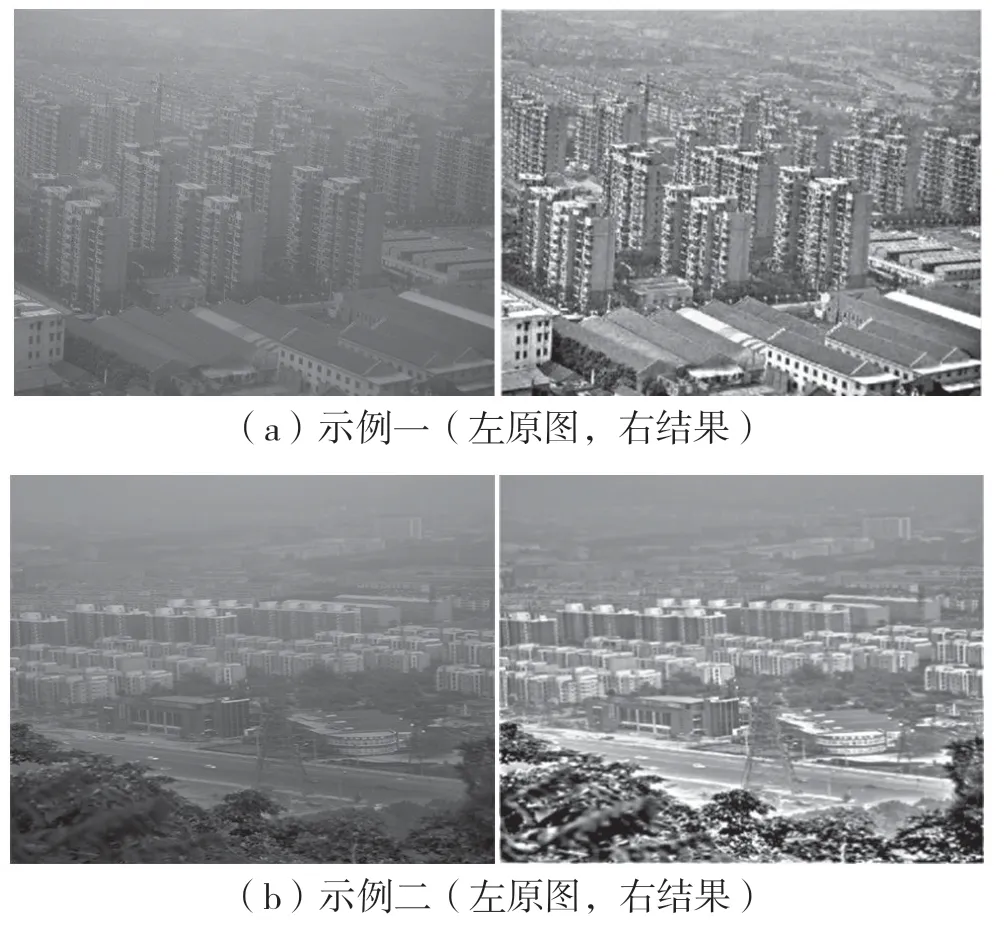
图10 MSRCR 方法改进Retinex 去雾算法结果
表1 分别在峰值信噪比(Peak Signal to Noise Ratio,PSNR)、相似度衡量(Normalized Correlation,NC)、结构相似性(Structural Similarity Index,SSIM)方面对3 种算法进行对比。SSR 在三者衡量因素上都是最小的,处理结果图像失真度高,鲁棒性差,且与原图相似度最小;MSR 方法改进Retinex 去雾算法在结果上相比于前者有明显改进,但依旧不理想;MSRCR 方法改进的去雾算法效果最佳,PSNR 及NC 都比较大且SSIM 更接近1,因此图像失真度最小,鲁棒性较好,与原图相似度最高,且图像处理效果较好。

表1 不同算法的评价指标值对比
7 结语
本文提出改进Retinex的无人机图像去雾算法,并对受到外界环境影响的失真图像分别用两种方法去雾,在降噪处理后有良好的画面观感。实验结果表明,MSRCR 方法改进的算法去雾真实性较高,图像增强效果明显,且有效减少了失真度,与原图颜色更贴近。
