基于非线性扰动观测器的汽车电泳涂装输送机构自适应反演滑模控制∗
2020-12-23毕文东
毕文东 袁 伟
(江苏科技大学电子信息学院 镇江 212003)
1 引言
在汽车电泳涂装过时,车身的自动化输送系统是涂装生产线的大动脉。目前车身前处理及电泳涂装常用设备主要有普通悬挂式输送链、积放式悬挂输送链系统、双轨摆杆式输送链系统、和较为先进的多功能穿梭输送机和RoDip输送机[1]。对比国际先进的RoDip 输送机和多功能穿梭机技术,基于混联机构研发了一种结构简单、柔性化水平高、承载能力强的新型混联式汽车电泳涂装输送机构。既具备了并联机构刚度大、承载能力强、成本低、结构稳定等优点,有克服了并联机构工作空间小等缺陷。
目前国内存在大批量连续生产的汽车电泳涂装输送设备种类繁多,有普通悬挂式输送机、积放式悬挂输送机、摆杆式输送机、多功能穿梭机以及全旋反向浸渍输送机,但大部分都存在一定的缺陷,不能很好地解决对车身污染,消除车顶空气包、占地面积大等问题。从汽车电泳涂装输送设备的基础机构构型创新及其相关控制理论着手,利用混联机构兼有串联机构和并联机构的优点,根据文献[2]研发了一种结构简单、车型适用性广、柔性化水平高、承载能力强和更加环保的新型混联式汽车电泳涂装输送设备。由于混联机构在控制过程中存在的不确定因素多种多样,主要有控制器及检测装置的不确定性、建模误差、摩擦力影响、外部环境随机干扰等。为了实现新型混联式汽车电泳涂装输送机构的高性能控制,在控制算法设计中需要考虑诸多不确定因素的影响。相比之下,滑模控制对系统参数的不确定性具有较强的鲁棒性,但是传统的滑模控制存在一定的缺陷,即在开关来回切换时存在一定的惯性,使得运动轨迹穿梭于滑模面两侧,无法严格地从滑面滑向平衡点,从而引起系统存在抖振问题[3],降低控制精度[4]。为了克服滑模控制存在的问题,文献[5~6]提供了很多的参考方法,本文为了克服滑模控制存在的这些问题,采用非线性扰动观测器估计混联机构的内部扰动和外部扰动。反演设计方法是一种针对控制对象参数不确定和环境干扰而提出的控制策略[7],很好地解决了对象参数不确定的鲁棒控制问题。将反演控制和滑模控制相结合,可以有效增加系统对非匹配不确定性的鲁棒性,非线性干扰观测器与反演滑模控制结合能够进一步提高系统对外界扰动的鲁棒性及快速跟踪性能[8~11]。
本文针对新型混联式汽车电泳涂装输送机构的特点,提出了基于非线性扰动观测器的自适应反演滑模控制策略,以提高涂装输送机构控制的鲁棒性和抗干扰性。针对汽车电泳涂装输送机构存在的各种不确定性和外界干扰的情况,设计一种非线性扰动观测器进行在线观测,通过选择设计参数,可使其观测误差指数收敛。对引入非线性扰动观测器的系统采用滑模反演法设计控制器,使它对未知不确定性和外界干扰均具有很强的鲁棒性。在引入自适应控制律,进一步改善控制系统的跟踪性能,也提高了控制系统的响应速度和控制精度。
2 输送机构动力学建模
基于Lagrange 法建立了升降翻转机构笛卡尔空间动力学方程为

式(1)所描述的动力学方程有如下性质:
1)惯性矩阵是对称且正定的;
2)惯性矩阵是反对称矩阵,即:

关节空间的动力学方程可通过雅克比矩阵变换得到:

x=(x1,x2,x3,x4,φ1,φ2)T,xi(i=1,2,3,4) 分 别为四个滑块在x 轴方向位置,φj(j=1,2)分别为两个主动轮逆时针转动角度;升降翻转机构的雅各比矩阵。

将式(3)、(4)、(5)代入式(1),可得升降翻转机构在关节空间中的动力学方程为

M(x)为相应关节空间的惯性矩阵,C(x,ẋ)为相应的哥氏力和离心力向量,G(x)为重力项,τ 为广义驱动力。关节空间动力学方程与任务空间动力学方程的转换关系为

考虑输送机构实际工作中存在的摩擦力和动力学建模时产生的误差,结合式(6)标准动力学方程,建立含摩擦力和建模误差的升降翻转机构动力学模型为

在实际工作过程中,还存在运动阻力变化、舍入误差、采样时延、传感器噪声等诸多未知环境随机扰动,进而建立含外界扰动的升降翻转机构动力学方程为

式中,τext表示外界随机扰动。
把建模误差、摩擦力以及外界随机扰动视作集总扰动项,式(10)经整理后得到含集总扰动项的升降翻转机构动力学模型为

式 中τd=τext-ΔM(x)̈-ΔC(x,̇-ΔG(x)-D(t) 表示集总扰动项。
式(11)所描述动力学方程有如下性质:
3 基于非线性干扰观测器的自适应反演滑模控制设计
在电泳涂装输送机构系统设计中,由于外部干扰信号f 的存在,单纯反演滑模控制器会造成系统的输出较大。所以在具体的系统控制器设计中可将f分成两部分:一部分是可观测部分,例如系统的摩擦力;另一部分是不可观测部分,例如一些随机的外部干扰信号。基于此考虑,在设计控制器时,首先使用扰动观测器对可观测的扰动进行观测,对未观测出的干扰部分使用滑模控制进行补偿,系统结构如图1所示。
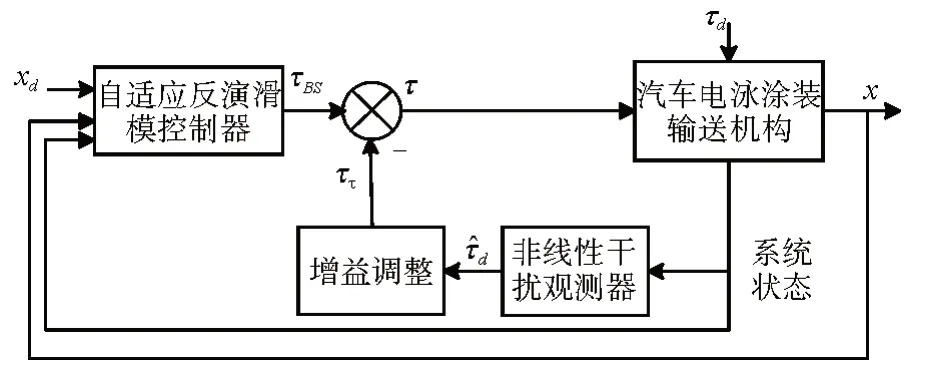
图1 基于非线性扰动观测器的汽车电泳涂装输送机构自适应反演滑模控制结构图
3.1 非线性扰动观测器设计
根据汽车电泳涂装输送机构的模型,采用chen中的非线性扰动观测器方法设计汽车电泳涂装输送机构的扰动观测器:



通常没有干扰τd的微分先验知识,假设相对于观测器的动态特性,干扰的变化是缓慢的,即:

结合式(1)、(5),可将式(20)变为

通过设计矩阵L=diag(l11,…,lnn) ,lii=l >0 ,可使观测器的观测误差按指数收敛。设计:

非线性扰动观测器的输出传输到增益调整模块,将观测到的干扰转化成相应输入通道的控制量,结合式(11)可知增益调整矩阵为单位阵,则:

由式(25)可知,系统采用扰动观测器后干扰由f变成F,总干扰减小,原系统可表示为

3.2 反演滑模控制器设计
为了便于研究,可将式(11)写为如下形式:

设xd为输送机构的位置指令,根据文献[12~14]反演控制的设计思想,结合滑模控制的相关理论,对输送机构自适应反演滑模控制器畸形设计,主要包括两个步骤:
步骤1
将系统的控制输出误差向量z1定义为
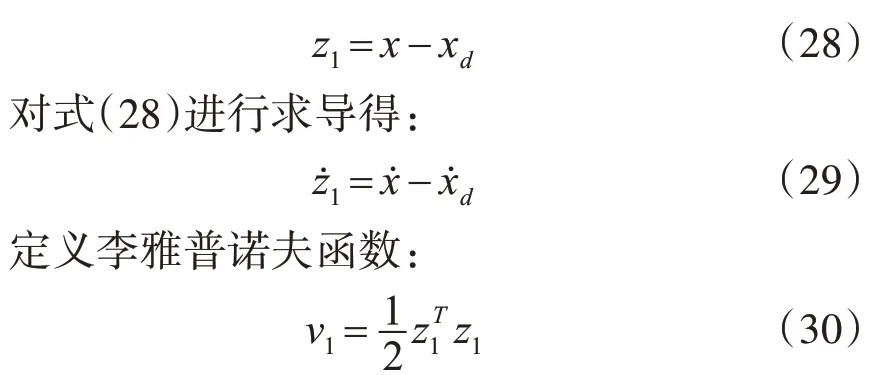
取虚拟控制量α1=c1z1,其中c1∈Rn×n为对称、正常值矩阵。定义:
式(32)中,如果z2=0,则v̇1为系统的控制输出误差向量z1的二次函数,有v̇1≤0,因此,需要进行下一步设计。
步骤2
对式(31)进行求导得:

式(35)中s为滑模面函数,定义为

其中k1∈Rn×n为对称、正定常值矩阵。由式(36)可得

3.3 自适应律设计
在实际的输送机构控制系统中,外部扰动信号T 包含许多不确定因素,通常情况T 的上界值很难预知,这就需要在设计控制器的时候要避开T 的上界值。在上述输送机构反演滑模控制器设计的基础上,引入自适应算法对输送机构的外部扰动信号T中无法观测的部分预估出来。
定义T̂为未知不确定项T的估计值,估计误差为
根据式(41)设计输送机构的控制律:

式中,τeq为等效控制,τvss为切换控制,h ∈Rn×n为对称正定常值矩阵,β 为正常数,sgn为切换函数。
自适应律取:

3.4 稳定性分析
定义非线性干扰观测的自适应反演滑模控制算法下的Lyapunov函数:

参考文献[12]的方法,取
式(48)可改写成

选取适当的常值矩阵c1、k1和h,使得P 为正定矩阵,从而使v̇4≤0。上述自适应反演滑模控制器的设计可使系统满足李雅普诺夫稳定性理论条件,z1和z2以指数形式渐进稳定,从而保证系统具有全局意义下指数的渐近稳定性,从而实现了汽车电泳涂装输送机构能够按照期望轨迹进行运动。
4 仿真实例

选取汽车电泳涂装输送机构的系统参数如表1。
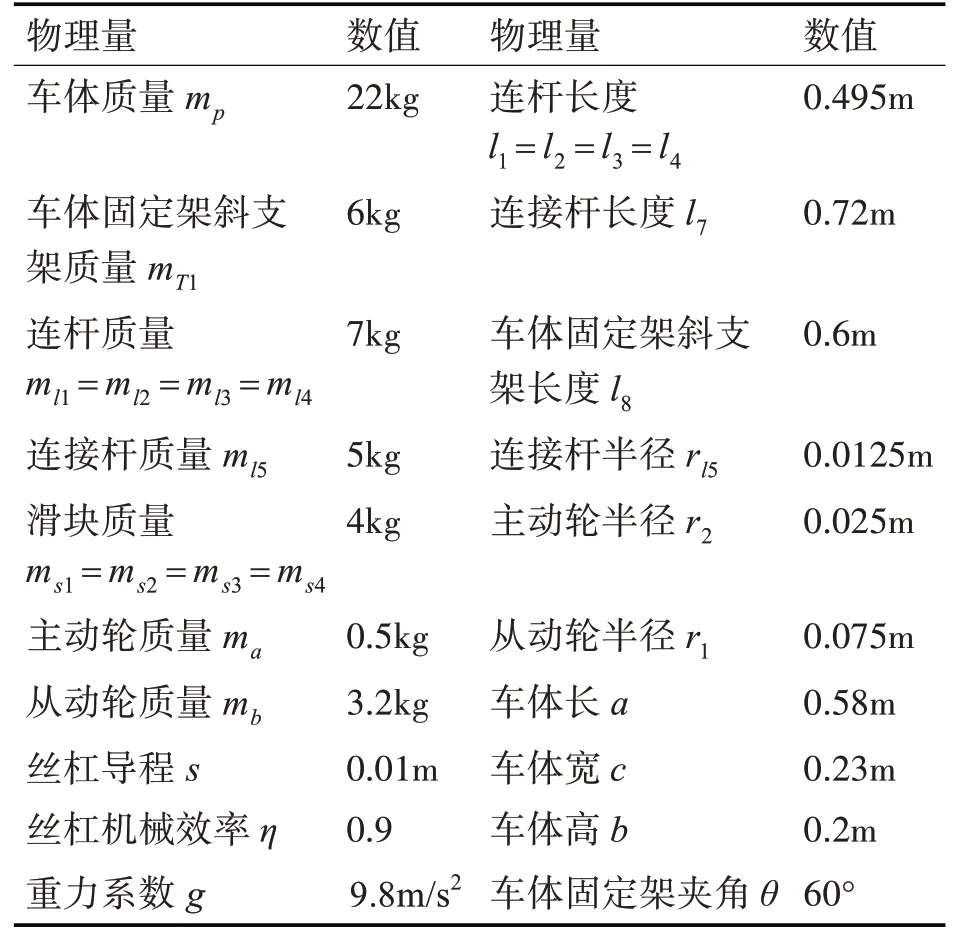
表1 新型混联式汽车电泳涂装输送机构的动力学物理参数
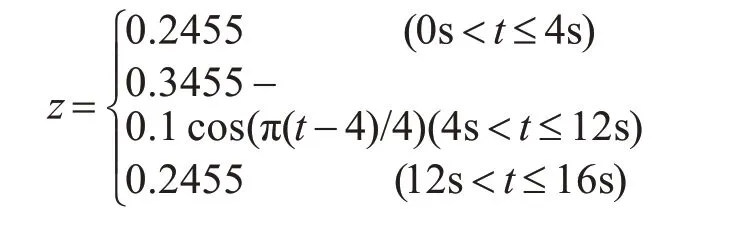
取:γ=3,β=1,c1=diag(2,2,2,2,2,2),h=diag(1,1,1,1,1,1) ,k1=diag(1,1,1,1,1,1) 。行走机构期望轨迹:

升降翻转机构连接杆重点在静坐标系的期望轨迹为x=0 (0s ≤t ≤16s)
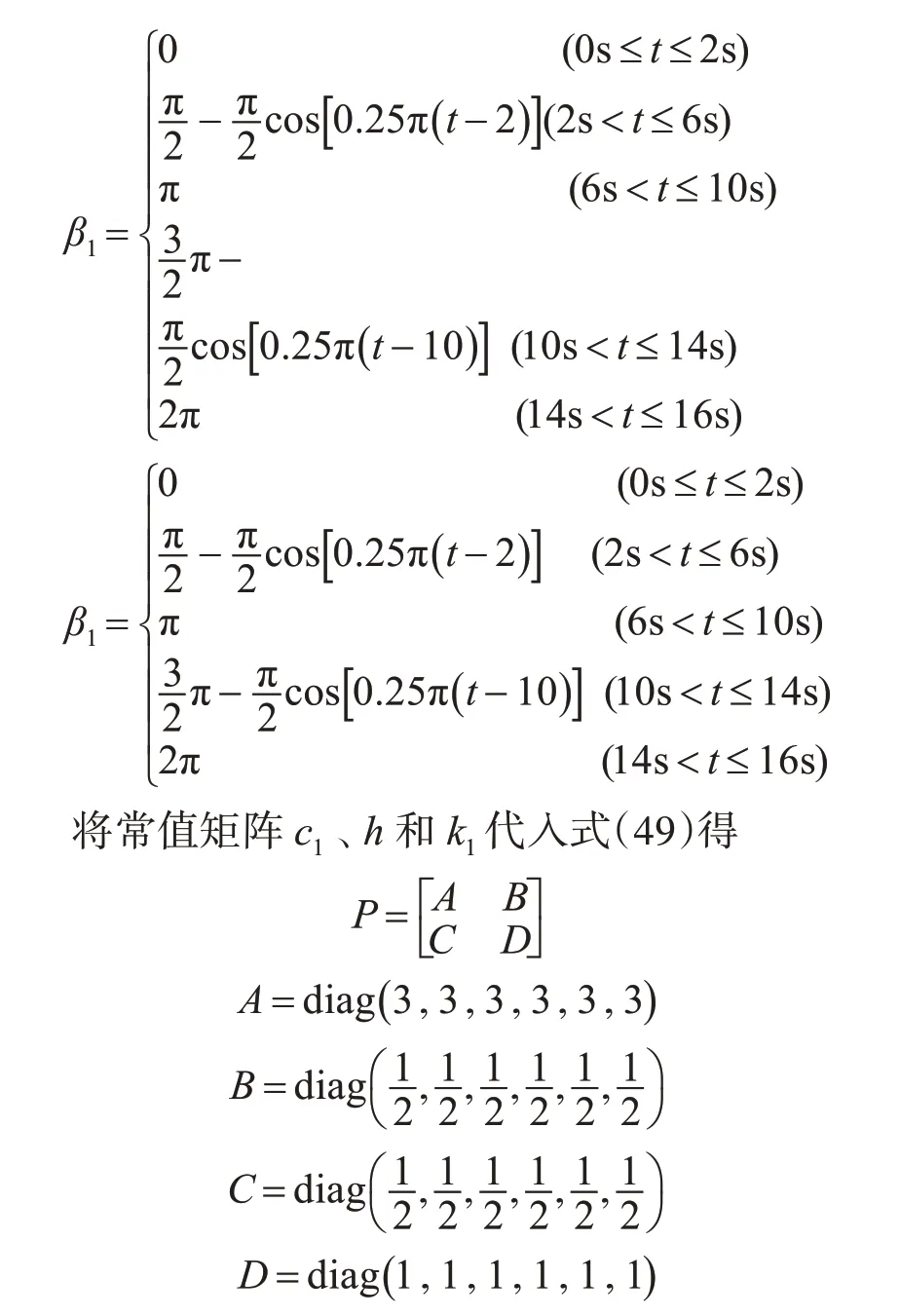
经验证P为正定矩阵。
非线性干扰观测器设计中,定义:

式中l= 50。
利用Matlab 软件对设计的控制器进行仿真。主要分两步:1)在无非线性干扰观测器且存在干扰的情况下分别对系统采用反演滑模控制律和自适应滑模控制律进行仿真,以验证自适应律对于汽车电泳涂装输送机构控制性能的改善情况;2)加入非线性干扰观测器的情况,对系统采取自适应反演滑模控制律进行仿真,以验证非线性干扰观测器对系统控制性能的改善情况。
在无干扰观测器时,对自适应反演滑模控制律,自适应律采取式(45)得到仿真曲线如图2所示。
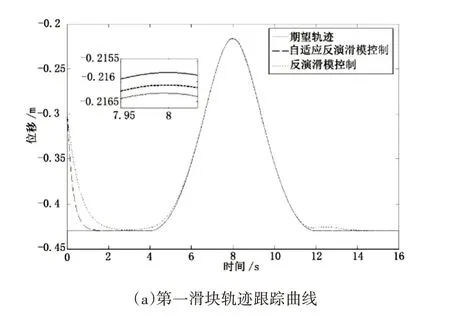

图2 单边升降翻转机构各主动关节轨迹跟踪曲线
在自适应反演滑模控制律设计基础上,系统引入非线性干扰观测器,对外部干扰进行观测,得到仿真曲线如图3所示。

图3 单边升降翻转机构各主动关节轨迹跟踪曲线(有DOC)
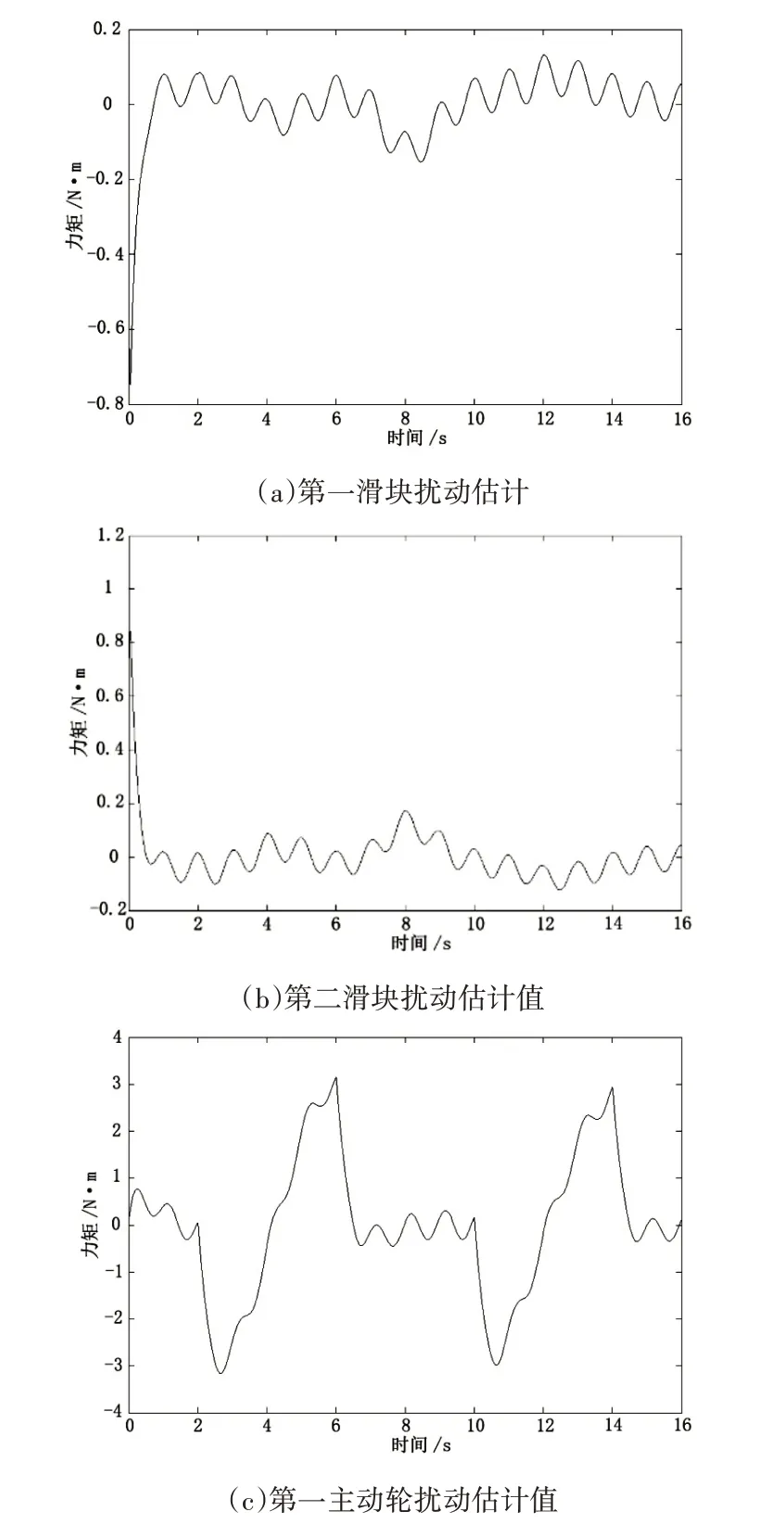
图4 各主动关节扰动估计值
5 结语
针对本文研究的汽车电泳涂装输送机构,提出了一种基于非线性扰动观测器的自适应反演滑模控制策略。控制器的设计首先使用扰动观测器对系统不确定性和外界干扰进行观测,然后对干扰进行补偿,进而达到汽车电泳涂装输送机构对期望轨迹的跟踪控制手段,也是闭环系统的稳定性得到保证。仿真结果表明,本文所研究的控制方法相对于传统的反演滑模控制方法不仅提高了系统的跟踪性能,而且抑制了系统的抖振,具有较强的鲁棒性和抗干扰能力。