基于关联交通流的区域交通信号协调控制方法
2020-12-21陈家旭赵永进万成才宋志洪
陈家旭 赵永进 万成才 宋志洪

摘 要: 以传统交通流模型为基础的交通信号控制方法难以适应具有复杂交通流动力学特性和随机扰动的实际交通场景。以MAXBAND干道绿波协调控制技术为启发,以关联路口上下游协调方向的带宽为切入点,提出一种基于关联交通流的区域交通信号协调控制方法。以相位方案设计和配时方案优化为基础,进行路口信号控制设计;基于点—边有向图构建关联交通流,研究上下游通道协调度和非协调区间的车辆滞留规律,构建区域交通信号协调控制问题的混合整数线性规划(MILP)模型。采用Vissim 8.0作为交通流数据模拟和仿真工具,采用Gurobi 8.1作为数学规划求解工具进行模型验证,表明延误时间下降、行程车速提高、停车次数减少,相邻路口间交通流运行协调性有所改善,区域整体运行态势得以优化,验证了提出的方法的有效性。
关键词: 协调控制;关联交通流;通道协调度;混合整数线性规划(MILP);Vissim
中图分类号:U491.54 文献标识码:A 文章编号:2095-8412 (2020) 05-090-07
工业技术创新 URL: http://gyjs.cbpt.cnki.net DOI: 10.14103/j.issn.2095-8412.2020.05.017
引言
随着我国城市化进程的快速推进和机动车保有量的连续增长,交通拥堵成为困扰城市居民出行的一大难题。如何有效地利用交通信号控制系统缓解拥堵,成为相关领域学者研究的热点[1]。
区域交通信号协调控制作为智能交通系统的重要组成部分,相较于单点信号控制和干线协调控制具有更加独特的优势,相关研究的开展对缓解我国城市交通拥堵具有重要意义[2]。在国外,区域交通信号协调控制研究起步较早。自1963年加拿大多伦多市出现第一套集中协调式感应控制信号系统以来,不断有新的区域交通信号协调控制技术被提出与应用到信号控制系统中。英国的TRANSYT系统以车辆延误时间、停车次数和行车总油耗等作为多元交通性能指标,建立优化目标,采用爬山法获得优化配时方案,并通过仿真模型进行迭代,获得最佳的信号配时方案[3]。SCOOT系统则是基于TRANSYT模型工具开发的自适应控制系统,实现了控制路网的实时协调控制[4]。文献[5-6]基于在线优化控制的广义“代理问题”,构建了基于交叉口延误加权最小化的协调控制模型,通过仿真進一步对比了全局优化方法和分散优化方法,并通过网络分类降低了网络规模,提高了优化效率。国内对区域交通信号协调控制技术的研究也大体相同,主要以交通流模型为基础,对相位差和绿灯时间进行优化[7-8]。
所谓以交通流模型为基础,即以交通流综合运行指标为优化目标研究交通信号协调控制问题,并设计各类智能算法,提高计算效率和优化效果,以满足实时或大规模的优化控制需求[9]。然而,复杂的交通流动力学特性和外部环境的随机扰动,使得对实际场景进行精确的数学建模和辨识变得极其困难,难以达到满意的控制效果[10]。受已被广泛应用的MAXBAND干道绿波协调控制技术的启发,本文以区域网络中关联路口上下游协调方向的带宽为切入点,构建基于关联交通流的区域交通信号协调控制方法进行研究。研究思路是在文献[11]提出的相位协调率的基础上,将协调指标推广到交叉口任一交通流向,以通道协调度作为区域网络的性能协调指标,并以非协调区间驶入下游路段的车辆作为可靠性约束,在路口配时优化的基础上构建区域相位差优化的混合整数线性规划(Mix Integer Linear Programming,MILP)模型,以精确求解最优协调相位差。本文研究成果适用于大中型规模道路网络的协调控制优化。
1 路口信号控制设计
路口信号控制是信号协调控制的基础,需要满足交通流在单个路口上的通行需求,最小化车辆延误和停车次数。路口信号控制设计的核心内容是相位方案和配时参数。
1.1 相位方案设计
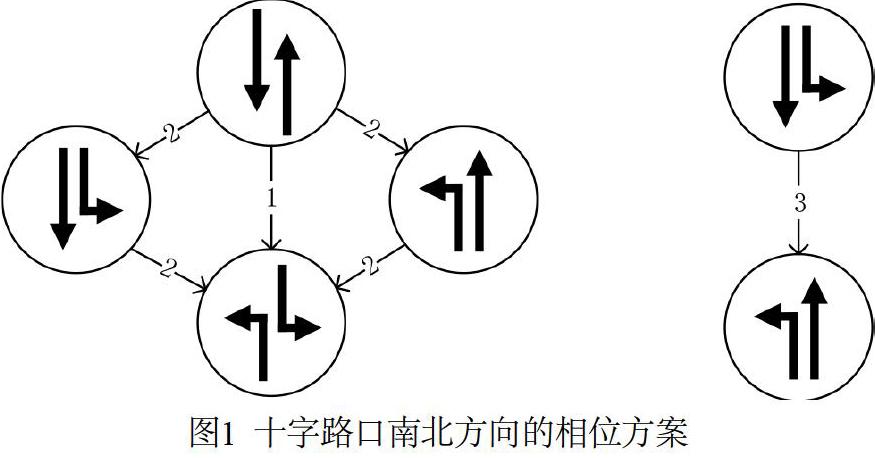
确定相位方案是路口信号控制设计的首要步骤。为避免相位方案设计过程中的交通流冲突和有可能发生的交通流通行权缺失,依据路口渠化和信号灯类型,为相交两方向设计独立的相位方案库。以十字路口的南北方向为例,可能的相位方案如图1所示。
图1给出的三种相位方案分别为:1)对向直行—对向左转的相位方案;2)在相位方案1的两相位中增加单边放行作为搭接相位的相位方案;3)单边依次放行的相位方案。相位方案1、2需要南北方向渠化和灯组设置满足直行、左转交通流独立放行需求;相位方案3要求南北方向进口允许直行,左转交通流同时放行。检查路口渠化和灯组设置,确定南北和东西方向可选择的相位方案,并对南北和东西方向进行相位方案组合,即获得可选择的路口相位方案。其中右转默认全程放行,人行跟随同侧直行放行。
1.2 配时方案优化
在获得合适的相位方案后,需要设置配时参数,为各相位进行理想的通行权分配。选择被广泛应用的HCM延误公式构建目标函数,以饱和度作为控制约束,建立路口延误的最优化配时模型:
其中, d是各交通流向的每车信控延误(单位:s/pcu),采用HCM延误公式计算;C为周期时长(单位:s);是计算交通流向的绿信比;x是饱和度;c是通行能力(单位:pcu/h),由交通量q、相位绿灯时间g、总损失时间L和饱和流量S等基础参数计算求得。
上述优化模型为非线性模型,通过设计的粒子群优化算法对上述模型进行求解,可获得所有可选择的相位方案的优化配时结果及该配时方案下的路口延误。选择路口延误最小的相位方案及配时作为路口信号控制设计方案。
2 信号协调控制模型
信号协调控制的目的是增加相邻路口信号控制的协调性,降低停车延误,避免排队失衡。为实现相邻路口间相关交通流放行的连续性,引入关联交通流的概念,重构城市路网拓扑结构,并引入通道协调度的概念,评价道路网络协调性能。同时,分析各关联交通流在非协调时段滞留在路段上的车辆数,避免因系统整体协调而导致的局部溢出。最终,以路网总体通道协调度为优化目标,以路段滞留车辆为控制约束,构建区域交通信号协调控制模型。
2.1 关联交通流
城市道路网络是由节点和单一流向路段组成的点—边有向图,记为。进一步地,节点i的渠化信息由内部的交通流向组成,记为;路段j由起始节点和终止节点确定流向,由关联交通流表示车流在相邻路口间的上下游关系。包括上游交通流集合、下游交通流集合。如图2所示的相邻路口交通流,路段j的关联交通流为,。也可以表示成。
关联交通流具备关联属性,由直接或间接参数组成,关联属性详情如表1所示。直接参数包括下游交通流、上游到达流量、上游饱和流量,间接参数包括上游协调权重、协调时间和路段容量。
2.2 通道协调度
通道协调度的研究对象是组成相位的灯组通道,因此需要将式(1)模型优化获得的配时方案解析成通道的放行时序。以表示路口通道放行区间,二者满足。如图3所示,上游协调通道绿灯在下游路口B的映射区间为
其中,为关联交通流的协调时间。相对于上游路口A,下游协调通道绿灯区间为
其中,是绝对相位差。和的重合部分是协调区间,定义协调区间时长与周期的比值为通道协调度。以上下游路口解析的通道放行分布和相位差构建关联交通流协调度计算模型,步骤如下。
(1)根据关联交通流的属性特征,确定参与计算的路口、交通流向及相关参数,并获取上下游相关交通流向的放行时序。
(2)以下游路口协调通道的放行时序作为基准,对基本定义中上游映射区间进行变换:
其中,和分别是关联交通流的上游交通流f映射到下游路口的放行开始时间和结束时间,f属于。为保证映射后的区间在一个周期时序内,需要对映射区间进行求余。
(3)确定上游映射区间与下游放行区间的重合部分,即协调区间。首先可以确定,而经过对周期求余后,存在的可能。如图4所示,灰色部分为映射区间。
在一个周期时序内,与只有一个可能的重合部分,即协调区间为
其中,和分别表示协调区间的开始时间和结束时间。
在一个周期时序内,与有两个可能的重合部分,即协调区间为
检查并舍去的协调区间。
(4)计算关联交通流协调度。首先确定关联交通流中上游交通流f与下游协调交通流的协调时间,即
其中,M是协调区间的數量,;m是协调区间序号。根据协调度定义进一步获得关联交通流的总体协调度,即
2.3 非协调滞留
非协调滞留是因关联交通流中上下游放行的非协调部分导致一部分车辆无法实现下游协调交通流向的连续通行而形成的滞留,必须在停车线前等待红灯的现象。
非协调区间是上游协调映射区间与下游协调交通流非绿灯区间的重合部分。相对于绿灯区间,非绿灯区间为,易知。类似于协调区间,按照上游映射区间的可能性分类进行推导,用和表示非协调区间的开始时间和结束时间。
检查并舍去的协调区间。
假设在绿灯期间,车流以平均流率驶出,则非协调区间的滞留车辆为
其中,是上游交通流f在绿灯期间的平均驶出流率,其值为;是上游交通流f与下游协调交通流的非协调时间,其计算方法与协调时间相同,即
2.4 目标及约束
通道协调度体现了上下游路口关联交通流间的协调程度,因此模型目标之一是最大化系统总协调度。此外,非协调区间滞留车辆越少,关联交通流的行车延误、停车率就越低,因此模型目标之二是最小化非协调区间滞留车辆。综合以上两项优化目标,模型的目标函数可以构建为
其中,k是系统中关联交通流的序号,cdgk、和rck分别是第k个关联交通流的协调度、非协调滞留车辆和路段容量,的计算方法为
即是式(13)获得的。模型是以关联交通流作为系统基本单位构建而成的。
为避免因系统优化导致的局部损失,非协调区间放行的车辆应受到链接路段车辆承载能力的限制,避免溢出,因此该约束条件为
其中,是控制系数,建议控制在0.3~0.6范围内,或者可以根据期望的路段车速上下限确定,即
其中,vl为期望车速下限,vu为期望车速上限。
以上构建的目标函数和约束条件都是线性的,所述区域交通信号协调控制模型是一个MILP问题,其可行域为凸集,可通过数学规划方法进行精确求解。
3 模型验证
采用Vissim 8.0作为交通流数据模拟和仿真工具,采用Gurobi 8.1作为数学规划求解工具,验证本文提出的区域交通信号协调控制模型的优化效果。
3.1 仿真路网
设计了一个“两横三竖”的交通子区。如图5所示,该仿真路网“两横”为主干道,“三竖”为连接主干交通的次干道,有10个车辆输入断面。各个断面的交通车辆输入量如表2所示。
经过仿真标定,各路口直行车道的饱和流量为2 000 pcu/h,左转车道饱和流量为1 900 pcu/h,右转车道饱和流量为1 600 pcu/h。基础控制方案为经验方案,通过VISSIM仿真获得初始信号控制方案下2个小时的区域交通流数据,作为路口方案优化和信号协调控制的依据。
为提高协调效果,通过对初始仿真获得的排队长度进行分析,降低排队长度或排队容量。比较大方向的饱和度控制阈值,将其置为0.9。大方向包括:路段1-A左转,路段 A-B直行,路段B-A直行,路段B-A左转,路段5-C直行,路段F-C直行,路段D-E直行,路段7-F直行、左转。剩余方向饱和度控制阈值均为1.0。
3.2 仿真分析
分别对单路口信号控制优化方案(路口优化)和子区协调控制方案进行仿真和数据评价分析,2个小时仿真时间内的子区总体运行态势如表3所示。
以基础方案的运行态势为背景,分析路口优化与区域协调控制的提升效果。表3中的态势分析结果表明:路口优化控制下,子区总体运行态势较基础方案下有较大程度的提升:平均行程车速提高2.4%,停车次数减少24.1%,延误时间下降11.6%;子区协调控制下的总体运行态势进一步优化:平均行程车速提高2.1%,停车次数减少2.4%,延误时间下降4.3%。仅从子区总体运行态势来看,子区协调相对于路口优化的提升效果较小,这是因为子区协调控制的影响范围是路口间的路段,边界路段无协调效果,在设计算例中二者的比例为7/5。
表4给出了受协调控制影响的部分路段的运行态势参数。受协调控制影响的部分路网在子区协调控制下的运行态势较仅有路口优化控制的情形显现了较大幅度的优化:平均行程车速提高5.6%,停车次数减少5.5%,延误时间下降6.8%。在子区所有受协调控制影响的路段中,9个路段的运行效率得到显著的提升,效率提升路段占总量的9/14。
4 结论与展望
本文受MAXBAND干道绿波协调控制技术的启发,提出了基于关联交通流的区域交通信号协调控制方法。首先,以路口信号控制设计作为区域交通信号协调控制的基础,保证路口的通行效率和交通运行的稳定性;进而,基于点—边有向图构建关联交通流,针对相位协调度及其描述区域性能的不足,提出了不受相位设计约束的通道协调度概念;然后,以通道协调度和非协调期间的释放车辆作为性能协调指标,构建区域交通信号协调控制问题的MILP模型,以优化子区所有路口,得到最优的协调相位差;最后,通过算例仿真,验证了提出的区域交通信号协调控制方法的有效性,实现了提高相邻路口间交通流运行协调性、优化区域整体运行态势的目的。
目前的研究成果还存在路口优化和子区协调相互独立的缺陷,二者的相互结合,如子区协调时的相位相序优化等,是未来的研究方向。
基金项目
道路交通集成优化与安全分析技术国家工程实验室资助项目“基于关联路口博弈的区域交通信号控制优化技术研究”(2019SJGC02)
参考文献
[1] 徐东云. 城市交通拥堵治理模式理论的新进展[J]. 综合运输, 2007(5): 5-8.
[2] 泉州装备制造研究所. 一种综合多种可控交通信号的区域交通优化控制方法: CN201810790876.9[P]. 2018-12-14.
[3] Vincent R A, Mitchell A I, Robertson D I. User Guide to TRANSYT Version 8 [Z]. Sri International, 1980.
[4] Bretherton R D. SCOOT Urban Traffic Control System—Philosophy and Evaluation[J]. Control, Computers, Communications in Transportation, 1990, 23(2):237-239.
[5] Adacher L. A global optimisation approach to solve the traffic signal synchronisation problem[J]. Procedia Soc. Behav. Sci., 2012, 54: 1270-1277.
[6] Adacher L, Tiriolo M. Distributed urban traffic signal optimization based on macroscopic model[C]//2016 Sixth International Conference on Innovative Computing Technology (INTECH). IEEE, 2016: 605-610.
[7] 卢凯, 徐建闽, 李林. 过饱和交通状态下的停车延误协调控制模型[J]. 控制理论与应用, 2010(12): 36-43.
[8] Yong Z, Hai-bo Z. Optimal control for region of the city traffic signal based on APSOWM[C]//2017 29th Chinese Control And Decision Conference (CCDC). IEEE, 2017: 2412-2417.
[9] 魏永濤, 高原, 孙文义, 等. 交通流动态扰动下的区域交通信号协调控制[J]. 自动化学报, 2019, 45(10): 1983-1994.
[10] 闫飞. 城市交通信号的迭代学习控制方法研究[D]. 西安: 西北工业大学, 2016.
[11] 华南理工大学, 广州康导信息科技有限公司. 一种子区多交叉口群决策控制方法: CN201310693343.6[P]. 2014-5-28.
作者简介:
陈家旭(1993—),通信作者,男,安徽淮北人,合肥工业大学硕士,安徽科力信息产业有限责任公司算法工程师。
E-mail: chenjiaxu@ahkeli.com
赵永进(1971—),男,安徽宣州人,长安大学硕士,公安部交通管理科学研究所首席研究员。
万成才(1984—),男,安徽霍山人,安徽大学计算机科学技术专业,智能交通安徽省重点实验室高级工程师。
宋志洪(1984—),男,湖北安陆人,长安大学硕士,安徽畅通行交通信息服务有限公司高级工程师。
(收稿日期:2020-07-07)
