基于转矩矢量控制分布式电驱动客车操纵性改善方法
2020-12-18苏亮,冷搏,金达
苏 亮,冷 搏,金 达
(1.北京理工大学机械与车辆学院,北京100081;2.厦门金龙联合汽车工业有限公司,福建厦门361023;3.同济大学汽车学院,上海201804)
为缓解全球环境污染和能源危机,研发和推广纯电动大客车已成为新能源汽车发展的国家战略和行业趋势,国内外整车企业积极投入纯电动大客车研发。分布式驱动纯电动大客车采用独立可控的轮边电驱动系统,传动链短、结构紧凑、底盘布置方便,给客车节省大量设计空间,同时为实现客车产品模块化、系列化创造有利条件。通过分布式驱动电机转矩矢量控制,可显著改善汽车行驶性能[1]。
转矩矢量控制普遍采用分层控制结构[2],上层为运动跟踪层,下层为转矩分配层。运动跟踪控制算法多以稳定性控制为目标,迈凯伦公司的Goggia等[3]采用积分滑模控制算法,在传动系布置和通讯延迟恶劣的情况下提升车辆机动性能,具有较好的鲁棒性。北京理工大学Cao 等[4]利用模糊控制实现上层的参考横摆角速度的跟踪。东京大学的Maeda等[5]基于参数辨识设计四轮驱动电动车转矩矢量控制。同济大学Yu等[6]面向乘用车常规行驶工况,设计了基于横摆角速度和质心侧偏角状态反馈的操纵性改善控制方法。
分布式驱动电动客车是大客车发展的重要趋势之一。但其相关的动力学控制研究较少。大客车转向时的载荷变化大,轮胎、悬架、转向系耦合特性强。在车辆侧向动力学研究中,上述非线性特性主要表现为轮胎侧偏特性的非线性,轮胎侧偏刚度是影响车辆运动控制的重要参数[7]。轮胎侧偏刚度可以通过传感器测量的方法获得。维也纳工业大学的Pohl等[8]利用胎面元件受力变形的原理,通过评估与路面接触的轮胎表面的机械应变得到轮胎侧偏刚度。明尼苏达州立大学Gurkan等[9]利用无线压电传感器接触补片的前边缘处的横向偏转曲线的斜率基于二次函数拟合获得轮胎侧偏刚度。此类方法精度较高,但是相关传感器较为昂贵,受环境因素制约较多,不适用于在量产车上推广。也有学者[10-11]通过系统辨识的方法估计轮胎侧偏刚度。俄亥俄州立大学的Wang 等[10]利用左右侧轮胎纵向力之差产生的附加横摆力矩设计了一种滑模观测器来估计得到轮胎的侧偏刚度。上海交通大学的陆辉等[11]设计了双扩展卡尔曼滤波器,利用两个平行通道分别估计轮胎侧向力与侧偏刚度,降低了对轮胎模型精度的依赖,有效保证了不同轮胎特性下的估计精度。考虑到大客车的行驶工况复杂,由整车质量的变化引起的各车轮垂向载荷变化是影响轮胎的力学特性尤其是侧偏刚度发生变化的一个重要因素[12]。因此如何结合整车质量估计实现车轮侧偏刚度自适应调整具有重要意义。
本文针对上述特点开展基于转矩矢量控制的分布式电驱动大客车操纵性改善方法研究,设计了考虑车辆非线性特性的前馈控制,引入基于抗积分饱和的滑模变结构控制律设计了反馈控制以提升系统鲁棒性,最后通过多工况仿真和实车试验验证了控制算法有效性。
1 自适应前馈控制设计
1.1 车辆模型
采用如图1所示的二自由度车辆模型设计控制律。假设车辆只作平面运动且前进速度恒定,此时车辆共有侧向运动和横摆运动两个自由度(degree of freedom,DOF)。
图中,Fyf为前轴等效侧向力;Fyr为后轴等效侧向力;δf为前轮转角;lf和lr分别为前、后车轴到质心处的距离;b为轮距(前后轮距相等);v为车速;ψ̇为车辆横摆角速度;Fxf为前轴等效纵向力(为保持车辆匀速而需要克服的阻力包括风阻、滚阻和侧向力的纵向分量;假设驱动力由前、后轴共同提供);Iz为车辆横摆转动惯量;αf与αr分别为前、后轮侧偏角;β为车辆质心侧偏角。
假设内侧外车轮具有相同的轮胎侧偏特性,得到车辆模型的动力学方程如下:

式中:M为整车质量;vx为纵向车速;Fd为车轮滚动阻力;Mz(αf)为轴的等效自回正力矩;Mz(Fd)为左右侧车轮滚阻因载荷转移而引起的横摆力矩;Mz(Fyf,δf)为前轴侧向力由于前轮转角而引起的轮间横摆力矩;ΔMz为附加横摆力矩。
二自由度车辆模型忽略了车身姿态变化、悬架变化和轮胎力的耦合关系;大客车质量重、载荷转移多、车身姿态和悬架变化大,因此,不能单纯地用轮胎特性描述车辆运动特性。
采用多项式描述前后轴等效侧向力和回正力矩与侧偏角关系,有:

式中:pi,qi,mi,ni均为拟合系数;Cd为风阻系数;b为轮距;Fzf为前轴总的垂向载荷;Fzr为后轴总的垂向载荷;Fzfl为左前轮的垂向载荷;Fzfr为右前轮的垂向载荷。
在TruckSim 仿真平台上输入一定的方向盘转角和路面附着系数,使仿真车辆缓慢加速至最高车速,通过记录车轴的侧偏角和轮胎力,采用二次和四次多项式分别对轴的等效侧向力和回正力矩进行拟合,拟合结果如图2所示。

图2 轮胎力拟合结果Fig.2 Tire force fitting results
1.2 整车质量估计
整车的纵向受力可以写成式(4)~(5)形式:

式中:Ti为各车轮的驱动力矩(i=fl,fr,rl,rr 依次代表左前轮、右前轮、左后轮、右后轮;下同);Jw为车轮的转动惯量;ωi为各车轮的角速度;R为车轮滚动半径;μr为滚动阻力系数;θ为坡度角;A为迎风面积;ρ为空气密度;axs为加速度传感器测得的纵向加速度;重力加速度g=9.8 m·s-2。
令阻力项FR为

整车质量估计算法仅在车辆起步阶段工作,此时车速很低,且合理地假设行驶过程中质量几乎没有变化。因此,可以认为FR变化不大,即ḞR≐0。基于递推最小二乘法[13]可以通过式(7)~(8)计算整车质量估计值M̂。

各车轮的垂向载荷Fz可以用式(9)表示:

式中:h为整车质心高度;l为轴距;ay为加速度传感器测得的侧向加速度;Fzrl为左后轮的垂向载荷;Fzrr为右后轮的垂向载荷。
1.3 前馈系数设计
为有效满足控制性能需求,对整车质量进行估计后,需要根据估计的质量结合各车轮垂向载荷分布实现式(1)和(2)参数自适应调整。小侧偏工况下,轮胎侧向力与垂向载荷比值与侧偏角成线性关系[14],定义整车质量估计值与名义值的比值ε=实际行驶过程中的前后轴等效侧向力和回正力矩随整车质量变化,为式(3)中在名义整车质量下的拟合值与系数ε的乘积。
转矩矢量控制可以改善车辆的转向特性。采用一次型的车辆理想不足转向度能使车辆的转向特性尽量维持在线性区,有利于驾驶员操作;但是其需求的横摆力矩较大,需求控制能量高,易造成控制输入大幅度抖振。而采用二次型的车辆理想不足转向度能更好地表征车辆的非线性特性,拓宽车辆操纵性改善控制的作用范围。本文采用二次型的车辆理想不足转向度US:

式中:C为控制系统参数,初选为0.01。原集中驱动车辆和不同形式理想转向特性如图3所示。

图3 车辆转向特性Fig.3 Vehicle steering characteristics
根据车辆二自由度模型,前后轴侧偏角为

联立式(10)~(12)可以得到车辆不足转向度:

由式(13)可以计算得到在不同的前轮转角和车速的输入下的参考侧向加速度ayref

因此,前、后轴理想侧偏角之差为

联立式(1)、(14)和(15),可得车辆前、后轴的参考侧偏角αf,ref和αr,ref;代入式(2)中,并由稳态条件得到不同方向盘转角和车速下的需求前馈横摆力矩MFF,如图4所示。
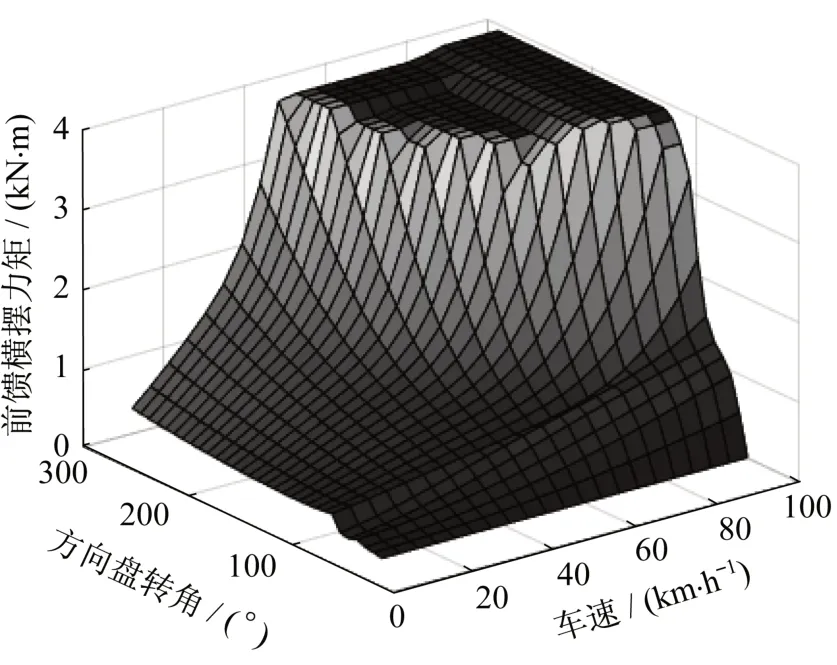
图4 前馈横摆力矩三维查表Fig.4 Three-dimensional look-up table of feedforward yaw moment
2 抗积分饱和的滑模变结构反馈控制设计
考虑到质量的自适应过程中,垂向载荷计算未考虑悬架形变,质心高度也会有一定范围的变动,仅依靠前馈的开环控制不足以满足车辆的高品质操纵性改善目标,因此需要设计反馈控制。
由式(14)可以得到车辆的参考侧向加速度,同时考虑到路面附着限制(|ay|<μg,μ为路面附着系数),忽略常规工况下较小的质心侧偏角,根据车辆二自由度模型可以得到由路面附着限制的理想横摆角速度为

式中:安全系数η=0.9,为经验值,可实车标定。
为提高横摆角速度误差反馈控制对建模误差和外界扰动的鲁棒性,选用滑模控制来实现车辆横摆角速度对参考横摆角速度的跟踪。横摆角速度跟踪误差为

采用抗积分饱和的滑模变结构控制律[5]设计反馈控制横摆力矩MFB为
式中:kp,ki和θ均为控制器参数。
则附加横摆力矩为

采用基于优化理论的分配控制[15]实现附加横摆力矩在4个驱动电机的分配。
3 仿真分析
试验平台基于某企业开发的6 m分布式驱动纯电动客车,前后4个车轮各装备一个轮边电机,均可以独立控制。整车及电机主要参数如表1所示。传感器包括惯性元件、方向盘转角和轮速传感器。仿真试验在TruckSim 和MATLAB/Simulink 联合仿真环境中进行。实车试验使用量产的电动汽车整车控制器进行数据采样、在线估计和实时控制。

表1 车辆及电机主要参数Tab.1 Main parameters of vehicle and motor
3.1 稳态回转工况
参照《GB/T 6323—2014 汽车操纵稳定性试验方法》[16]设计稳态回转仿真工况:路面附着系数0.85,转向盘转角300°,缓慢而均匀地加速(纵向加速度不超过0.25 m·s-2)直至侧向加速度超过6.5 m·s-2,仿真结果如图5所示。
从图5a 中可以看出,整车质量估计的结果精度较高,误差约为1.82%,估计收敛时间约为0.5 s。从图5b 中可以看出,相比于未施加控制车辆,施加控制车辆的横摆角速度更大,即横摆角速度增益提高,转向响应更快。未施加控制车辆在60 s 以后横摆角速度的下降原因是随着车速的增加,不足转向特性更加显著,横摆角速度稳态增益下降。从图5c有无控制车辆对比可以看出,未施加控制车辆呈现较大的不足转向特性,施加控制车辆的不足转向特性得到改善;未施加控制车辆的不足转向度(前后轴侧偏角之差与侧向加速度关系曲线上侧向加速度值为2 m·s-2处的平均斜率[17])为0.125,施加控制车辆的不足转向度为0.025,施加控制后不足转向度降低,车辆在更大范围内更接近中性转向,操纵性能得到提升。。
3.2 蛇行工况

图5 稳态回转工况仿真结果Fig.5 Steady state turning simulation results
参照GB/T 6323—2014[16]设计蛇行工况进行仿真验证。设定路面附着系数0.85,车速65 km·h-1,标桩间距30 m。忽略通过第一和第八个标桩时的峰值转角,通过第2~7 个标桩时的方向盘转角绝对值峰值如表2所示,整车质量估计结果如图6所示。从图6中可以看出,整车质量估计的结果精度较高,误差约为1.45%,估计收敛时间约为0.8 s。其中,未施加控制车辆的方向盘转角峰值平均值为51.8°;施加控制车辆的方向盘转角峰值平均值为39.4°,降低了24%,减轻了驾驶员的操作负担,提升了车辆操纵性能。

表2 蛇行工况方向盘转角绝对值峰值Tab.2 Peak steering wheel angles in slalom simulation

图6 整车质量估计结果Fig.6 Estimation results of vehicle mass
4 实车试验
4.1 稳态回转工况
参照《GB/T 6323—2014 汽车操纵稳定性试验方法》[16]设计稳态回转仿真工况:初始转向盘转角200°,车辆从静止缓慢而均匀地加速(纵向加速度不超过0.25 m·s-2)直至侧向加速度超过6.5 m·s-2,同时转动方向盘转角跟踪参考圆周(半径约为23 m)。试验结果如图7所示。
从图7 可以看出,整车质量估计的结果精度较高,误差约为1.54%,估计收敛时间在2 s 以内。随着车速增加,无控制情况下车辆表现出明显的不足转向特性,在6 ~8 s 车速较高时,侧向加速度较大,前轴已经发生侧滑现象,横摆角速度响应渐渐不能满足需求;而在本文控制算法介入下,车辆从低速到高速始终能保证稳定圆周行驶,使驾驶员对车辆的操纵负担大大减轻。相较于未施加控制的情况,施加控制的车辆方向盘转角能保持在小范围变化,操纵所需的方向盘角度平均较少约15.37%,车辆操纵性能好,控制算法有效减轻了驾驶员操纵负担。

图7 稳态回转工况实车试验结果Fig.7 Vehicle test results of steady state turning
4.2 蛇行工况
参照GB/T 6323—2014设计蛇行工况进行实车试验验证。考虑到场地限制,实际绕桩数量少于标准规定(为7 个)。其中车速设置为50 km·h-1,整车质量估计结果如图8 所示,完成一次工况的方向盘转角随时间变化情况如图9、图10所示,横摆角速度跟踪结果如图11、图12所示。

图8 整车质量估计值Fig.8 Estimation result of vehicle mass

图9 方向盘角度随时间变化曲线(无控制)Fig.9 Steering wheel angle versus time (without control)

图10 无控制时横摆角速度与其参考值的对比Fig.10 Comparison of yaw rate without control

图11 方向盘角度随时间变化曲线(有控制)Fig.11 Steering wheel angle versus time(with control)

图12 有控制时横摆角速度与其参考值的对比Fig.12 Comparison of yaw rate with control
从图8 可以看出,整车质量估计的结果精度较高,误差约为1.32%,估计收敛时间在5 s 以内。图9~图10 的对比结果反映出,在有控制的情况下,试验进行时需要的方向盘转角峰值明显小于无控制的情况,平均峰值转角减小11.46°(21.53%)。图11和图12横摆角速度跟踪效果对比表明,无控制情况下受限于车辆固有的不足转向特性,实际横摆角速度与理想值相差较大,尤其在较大横摆角速度需求时,横摆角速度实际值与理想值差值的平均值为0.021 rad·s-1;而所设计的控制算法使得横摆角速度有较好的跟踪效果,横摆角速度实际值与理想值差值的平均值为0.015 rad·s-1,相比于无控制改善了28.57%,能良好响应驾驶员的控制期望,提升了车辆操纵性能。
5 结论
(1)针对大客车转向时载荷变化大,轮胎、悬架、转向系耦合特性强的特点,采用多项式描述前后轴等效侧向力和回正力矩与侧偏角关系。考虑车辆非线性特性,定义理想转向特性,设计了随转角与车速变化的自适应横摆力矩前馈控制。
(2)为提高控制系统鲁棒性,引入了整车质量估计算法提升车辆动力学模型精度,并基于抗积分饱和的滑模变结构控制律设计了横摆力矩反馈控制。
(3)基于分布式驱动平台进行了实车试验,结果表明,在稳态回转工况下,经过算法介入,横摆角速度跟踪性能良好,方向盘角度相比无控制组减小约15.37%;而在蛇行工况下,有算法介入下方向盘转角峰值明显小于无控制的情况,平均峰值转角减小21.53%。有效验证了操纵性改善控制方法在大客车横摆角速度跟踪性能提升和减轻驾驶员操纵负担上的效果。
