捷联式航空重力矢量测量低频误差机理和修正
2020-12-14蔡劭琨曹聚亮于瑞航
蔡劭琨,曹聚亮,于瑞航
(国防科技大学 智能科学学院,长沙 410072)
重力信息对于国民经济建设和军事应用都具有重要的意义。地面单点重力测量是获取地球重力场高频信息的传统方法,但是该方法在人迹罕至的地区是难以实施的,并且该方法效率很低,花费较高;海洋重力测量同样也不是一种效率很高的重力测量方法,因为其航速较慢,并且只能在海面上进行作业;卫星重力测量可以方便地对全球重力信息进行测量,但是只能得到地球重力场的长波部分,重力场的高频信息不能通过卫星数据获得。相比这几种重力测量方式,航空重力测量是快速获取大面积地球重力场中高频信息的一种有效手段。所谓的航空重力测量就是将重力传感器、姿态传感器、GNSS 等安装在飞机上进行重力测量的一种方式,这种测量方式用时少、效费比高,是目前重力测量的一种主要手段[1]。
航空重力测量仪器的基本结构可以分成三类:双轴稳定平台结构、三轴平台式惯性导航系统结构和捷联式惯性导航系统结构。
基于双轴稳定平台的重力仪是将重力传感器安装在一个稳定平台上,通过稳定平台来保持重力传感器的指向。典型的基于双轴稳定平台的重力仪有LCR海/空重力仪、Chekan 重力仪。该种类型的重力仪可以达到1 mGal/5 km(1 mGal=10-5m/s2)的精度水平[2]。
基于三轴平台惯导的重力仪其核心是一套三轴平台惯导系统,通过三轴平台惯导系统来将三轴加速度计组合保持在当地地理坐标系中。典型的有AIRGrav重力仪和GT 系列重力仪。这种类型重力仪可以达到1 mGal/3 km 的精度[3,4]。
“业无高卑志当坚男儿有求安得闲,工程建设虽然苦累,但是我依旧选择了这一行。”一腔热血到铁建参与祖国建设,这也许就是王维振的梦想。
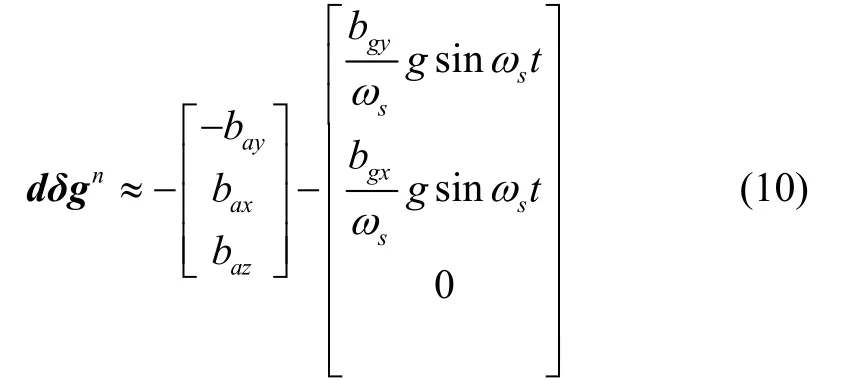
将式(9)代入到式(8)中,并将惯性元件误差简化为只有加表零偏(bax、b ay、b az)和陀螺漂移(bgx、b gy、bgz)。假设载体坐标系为前右下,x、y、z三个加表和陀螺分别沿载体坐标系的前向、右向和垂向安装,导航坐标系为北东地坐标系,测量载机由东向西飞行,由此可得重力仪原始测量误差与惯性元件误差之间的关系:
虽然现金流动性较强,但其盈利能力并不高。Jenson(1986)提出的自由现金流量假说认为,如果公司持有过多不必要的现金,管理者会不知不觉地实施现金滥用,从而盲目地进行投资项目,这在无形之间增加了企业经营期间的财务风险,也是对股东权益损害较大的一种自私自利的行为。由此可知,董事会需要抑制这种恶性投资行为来提高现金配置效率。但是当前现状是不论出于什么样的原因,很多公司都愿意超额持有现金量以满足自己的财务报表的需求。
一类误差是由惯性导航系统带来的,包括由姿态误差ψ产生的误差项[f n×]ψ以及由加速度计测量误差产生的误差项C bnδfb;
在可以进行重力矢量测量的两类重力仪中,基于捷联惯导系统的重力仪相比于基于三轴平台惯导系统的重力仪,其结构较为简单、体积和重量都比较小、安装方便、操作简易,是重力仪的一个重要发展方向。本文基于国防科技大学研制的SGA 系列捷联式重力仪,介绍了捷联式重力矢量测量的原理,并分析重力矢量测量低频误差的产生机理及相应的修正方法。
本文在借鉴CDP项目分类标准的基础上,参考环保部公布的 《上市公司环境信息披露指南》,并结合样本公司碳信息披露的实际情况,建立了涵盖战略规划、治理架构、风险或机遇识别、碳排放核算四大类的上市公司碳信息披露评价体系。在碳信息披露评价体系的框架下,运用Python软件实现对样本公司所披露文件的内容爬取与文本分析,最后通过算法汇总企业碳信息披露所获得分。碳信息披露评价体系见表1。
1 重力矢量测量数学模型及误差分析
根据牛顿第二定律,质点的运动方程在惯性坐标系i中可以表示为:
通过FMA评分判断,治疗前两组患者无明显差异,治疗后两组患者相比,差异有统计学意义(P<0.05)。见表1。

式中,Gi表示引力加速度;表示质点在惯性坐标系i中的运动加速度;xi表示质点在惯性坐标系i中的位置矢量;fi表示惯性坐标系i中的比力,由重力传感器获得。
式(1)表明,不能从重力传感器测得的比力fi中将引力加速度和运动加速度区分开来。对于静态重力测量,此时质点运动加速度等于零,重力传感器输出值在大小上等于引力加速度。但是在动态的重力测量中质点的运动加速度非零,此时不能从重力传感器的测量结果中将运动加速度扣除,因此,动态条件下仅仅通过单一的重力传感器并不能测量得到重力信息。
动态重力测量的基本原理可通过对式(1)进行变换得到:

式(2)可以表示成在当地地理坐标系n中的形式[9]:

式中,γn表示正常重力矢量在n系中的投影;v en表示载体的速度;表示载体的加速度;fb表示载体坐标系b下的比力信息;Cbn表示导航坐标系n(即当地地理坐标系)和载体坐标系b之间的转换矩阵;ωenn表示n系相对于地球的转动角速度在n系中的表示;ω ine表示地球相对于惯性系i的转动角速度在n系中的投影;δgn表示重力矢量测量所获得的扰动矢量信息。式(3)的右边部分根据来源不同可以分为两类:
步骤5:在步骤4 得到的重力扰动中存在大量的高频噪声,噪声的幅值是重力信号的几百甚至几千倍,重力信号比噪声大的频带只集中在低频段的很窄范围内,需要通过低通滤波器来提取重力扰动信息(示意图如图5所示)。并且由于重力信号和噪声之间没有明显的过渡,低通滤波器的截止频率较大(截止频率大,对应的波长则较短)虽然有利于提高测量结果的空间分辨率,但会使得残留噪声增多,从而导致精度降低;相反,如果低通滤波器的截止频率较小(相应的波长较长),虽然可以提高滤波的效果,同时也会有更多的重力信号被一起滤除,从而影响测量结果的空间分辨率。因此,需要根据任务的需求综合考虑测量精度和空间分辨率,选取合适的低通滤波截止频率;
从图2可看出,谷索的就位对吊索索力影响很小;脊索就位对不同索的索力影响不同;膜的安装将提高吊索的索力。
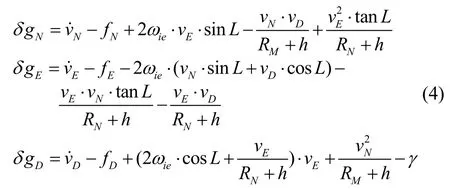
式中,δgD表示重力扰动的垂向分量,即标量测量的结果;δgN表示重力扰动的北向分量;δgE表示重力扰动的东向分量;vN、vE和vD分别表示载体运动速度的北向、东向和垂向分量;和分别表示载体运动加速度的北向、东向和垂向分量;ω ie表示地球自转角速度的大小;RM和RN分别表示子午圈曲率半径和卯酉圈曲率半径;L和h分别表示纬度和高度;γ表示正常重力的数值大小。
改革开放前我们重视公平而忽视效率,把共同富裕当作同步富裕、同时富裕和同等富裕去追求,导致社会的同步贫穷、同等贫穷,造成分配上的平均主义和“大锅饭”。改革开放后我们追求公平与效率的统一,允许一部分人、一部分地区先富起来,打破了平均主义和“大锅饭”,调动劳动者积极性,解放和发展生产力,引起经济、社会和精神生活的深刻变化。所以,先富起来的办法比平均主义的老办法好,有利于实现先富。
对式(3)进行变分,可以得到捷联式航空重力矢量测量的误差模型:

同样,式(5)右边的误差项可以分成两类:
在这三种类型的重力仪中,基于双轴稳定平台的重力仪通常只配置了一个重力传感器,因此只能进行重力标量测量,基于捷联式惯性导航系统结构和三轴平台式惯性导航系统结构的重力仪不仅可以对重力的标量信息进行测量,还可以实现对重力矢量信息的测量(也就是对垂线偏差进行测量)。目前,进行重力标量测量的重力仪已经有成熟的商业产品(LCR、Chekan、AIRGrav、GT),重力矢量测量仪还没有成熟的产品,大部分处于实验室阶段。但是与标量测量相比,矢量测量在大地测量、固体地球物理、海洋学和资源勘探等方面具有优势[7]。首先,虽然垂线偏差可以利用费宁-梅内斯(Vening-Meinesz)积分通过重力异常信息间接得到,但是这种方法理论上需要全球覆盖的重力异常信息,这一条件是很难满足的,尤其是在极点区域。如果可以直接对垂线偏差进行测量的话,那么就不需要这么严格的条件,因此,重力矢量测量可以快递、经济地获得更精确的结果;其次,大地水准面对于固体地球物理中的均衡补偿具有很重要的意义,而大地水准面剖面可以通过对测线上的垂线偏差进行积分得到,并且沿测线对垂线偏差进行积分的方法不存在边界效应的问题[7];再次,借助于由垂线偏差得到的大地水准面资料,冰川学家可以研究冰川移动中的重力不平衡因素;第四,在海洋学中,结合海洋大地水准面信息和卫星测高确定的海洋表面,可以计算出所关心的洋流信息,而其中的海洋大地水准面可以通过垂线偏差来计算得到[8]。
内分泌失调是临床女性常见生理现象,由环境、生理及营养等方面因素引起。近年来,随着生活节奏不断加快,工作及家庭对女性造成的压力急剧上升,导致内分泌失调发生率增加。内分泌出现失调后,患者极易出现痤疮、肥胖、不育及妇科、乳房等表现和疾病,对其正常生活及工作造成影响。因此,有必要立即对其实施对应治疗,确保其健康。本研究选取300例内分泌失调患者作为研究对象,对其中150例采用克罗米芬联合绒毛膜促性腺激素、人绝经促性腺激素治疗取得满意效果,现报道如下。
式(3)可以写成分量的形式:
其中,在当前GNSS 精度条件下,由GNSS 引起的误差已经很小了,在这里不做讨论。因此,本文重点讨论由惯导系统引起的误差。在这种情况下,式(5)表示的航空重力矢量测量误差模型可以简化成:

展开成分量形式如下:
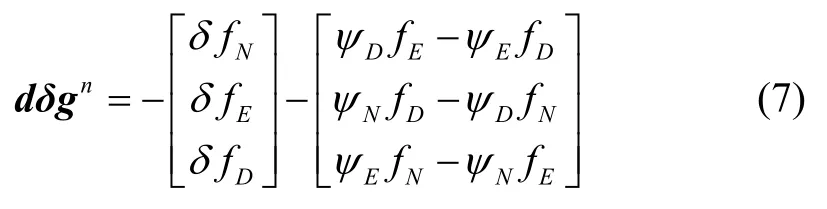
式中,fN表示加速度计比力测量值的北向分量;fE表示加速度计比力测量值的东向分量;fD表示加速度计比力测量值的垂向分量;δfN表示加速度计比力测量误差的北向分量;δfE表示加速度计比力测量误差的东向分量;δfD表示加速度计比力测量误差的垂向分量;ψ N、ψ E和ψ D分别表示沿当地地理坐标系三个轴的姿态测量误差。
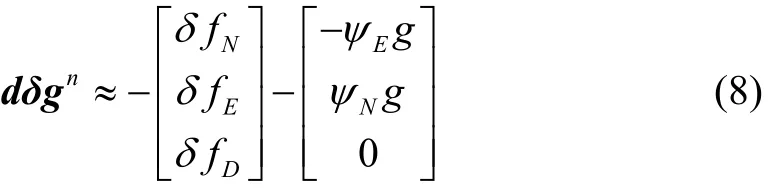
在航空重力测量中,要求飞机沿着测线水平匀速直线飞行。此时有fD≈g≫f N,fE,其中g为重力加速度大小,式(7)可以写成:
The level of A-CoA of the model group was increased obviously compared with that of the blank group (P< 0.05), and the level of A-CoA of the FZ and LWDF groups were decreased compared with that of the model group (P< 0.01; Fig. 3).
虽然采用组合算法能够在很大程度上估计惯导的姿态误差并予以抑制,但是并不能将姿态误差完全消除,这也正是引起重力矢量测量的一个重要的误差源。所以舒勒周期会一直存在于测量结果中。姿态误差ψ主要是由陀螺漂移bg引起,可以近似表示为:

基于捷联惯性导航系统的重力仪其核心部分是一套捷联式惯性导航系统。通过捷联式惯导系统计算出载体的姿态,然后将三轴加速度计的输出投影到当地地理坐标系中。典型的系统有SISG[5]和国防科技大学研制的SGA 系列重力仪[6]。此种类型重力仪目前可以达到1-3 mGal 的精度,相应的分辨率为1-3 km。
从式(8)可以看出,对于重力标量测量而言,误差主要来自于加速度计测量误差,这一误差通常表现为常值误差或者线性漂移误差,可以通过机场停机坪处的重力真值来进行校正。而对于重力矢量测量,重力扰动水平分量测量结果不仅受到加速度计测量误差的影响,更重要的是还受到水平姿态测量误差ψN和ψE的影响,1 ʺ的姿态测量误差会引起4.75 mGal 的水平分量测量误差,而且姿态误差并不表现为常值或者线性的形式,很难通过机场停机坪处的垂线偏差真值来进行校正。
实际上,如图1和图2所示,在惯性导航系统中,水平姿态误差存在舒勒周期(蓝色曲线),并且这一周期性振荡的幅值受到傅科周期的调制(红色曲线)。需要指出的是,由于不知道水平姿态误差的初始相位,因此不能通过图1所示的姿态误差曲线对水平姿态误差进行补偿。但是在水平姿态误差曲线中存在舒勒周期和傅科周期两个周期,舒勒周期的周期为84.4 min(5064 s),傅科周期的周期在两极等于24 h,纬度越低,周期越大。那么重力水平分量的测量误差中也将存在这两个周期。对于典型的小型航测飞机,飞行速度大约为60 m/s,舒勒周期对应的波长为304 km,也就是说,捷联式航空重力矢量测量水平分量的测量误差主要影响波长大于304 km 的重力场长波部分,在重力水平分量测量结果中,波长大于304 km 的部分除了有真实的垂线偏差信息外,还包含姿态测量误差,是一种低频误差[5]。现在需要做的就是在低频段内对重力水平分量测量结果中的误差进行修正。
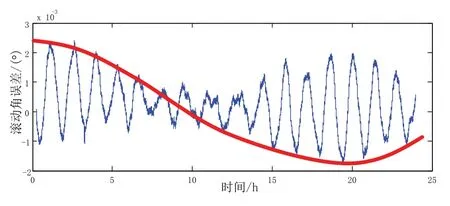
图1 惯导系统水平姿态误差之滚动角误差Fig.1 Roll error in Horizontal attitude errors of the inertial navigation system

图2 惯导系统水平姿态误差之俯仰角误差Fig.2 Pitch error in horizontal attitude errors of the inertial navigation system
如果将水平分量测量结果中波长大于304 km 的低频部分滤除,那么得到的重力水平分量信息只是相对重力信息,要想将估计出来的相对重力场与绝对重力场联系起来,就必须知道重力场的一些先验信息。而地球重力场模型正好可以提供这样一种重力场的先验信息。
2 地球重力场模型
EGM2008(Earth Gravitational Model 2008)是由美国发布的全球超高阶地球重力场模型[10],该模型是用一组球谐函数的系数来表示地球重力场,模型的阶次完全至2159 阶,相当于模型的半波长空间分辨率为5 ′(约9 km)。
可以利用EGM2008 模型通过下面两个式子来计算地球上指定点的重力扰动水平分量:
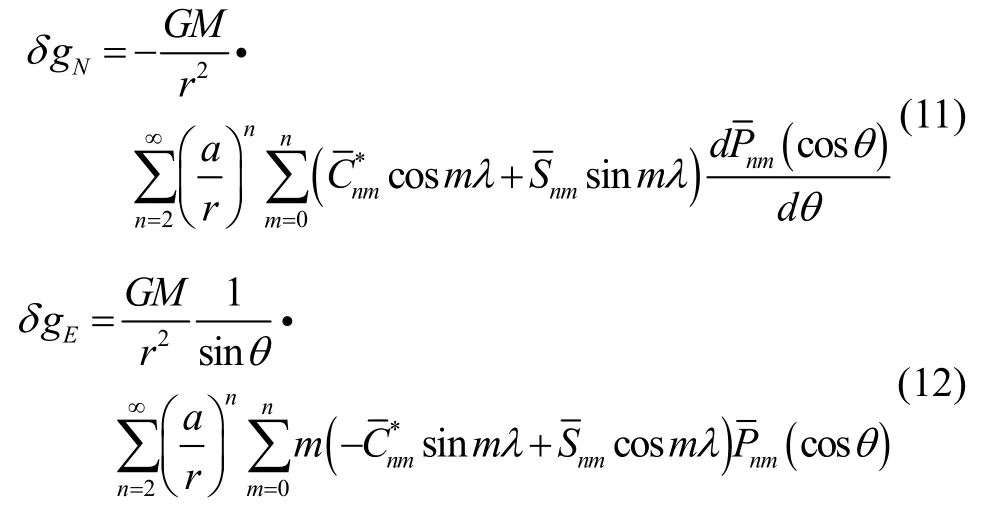
式中,GM= 3.986004415 ×1014m3/s2表示牛顿重力常数与地球质量的乘积;a= 6378137 m 表示地球的长半轴长度;r、θ和λ分别表示计算点的地心矢径、纬度和经度;和表示正常化的地球重力场模型球谐系数;n和m分别表示模型的阶和次;(cosθ)表示n阶m次的勒让德函数值;(cosθ) /dθ表示勒让德函数的一阶导数。
3 利用地球重力场模型修正水平分量中的低频误差
第二节的分析表明,在重力矢量测量结果的水平分量中存在低频误差,这一低频误差所处的频段和惯导系统水平姿态误差的频谱特性有关。可以在水平分量的测量结果中将具有误差的低频部分去除,然后用相应阶次的地球重力场模型计算值来代替具有误差的低频(长波)部分,这样就能对水平分量测量结果中的低频误差进行修正。数据处理过程如图3所示。
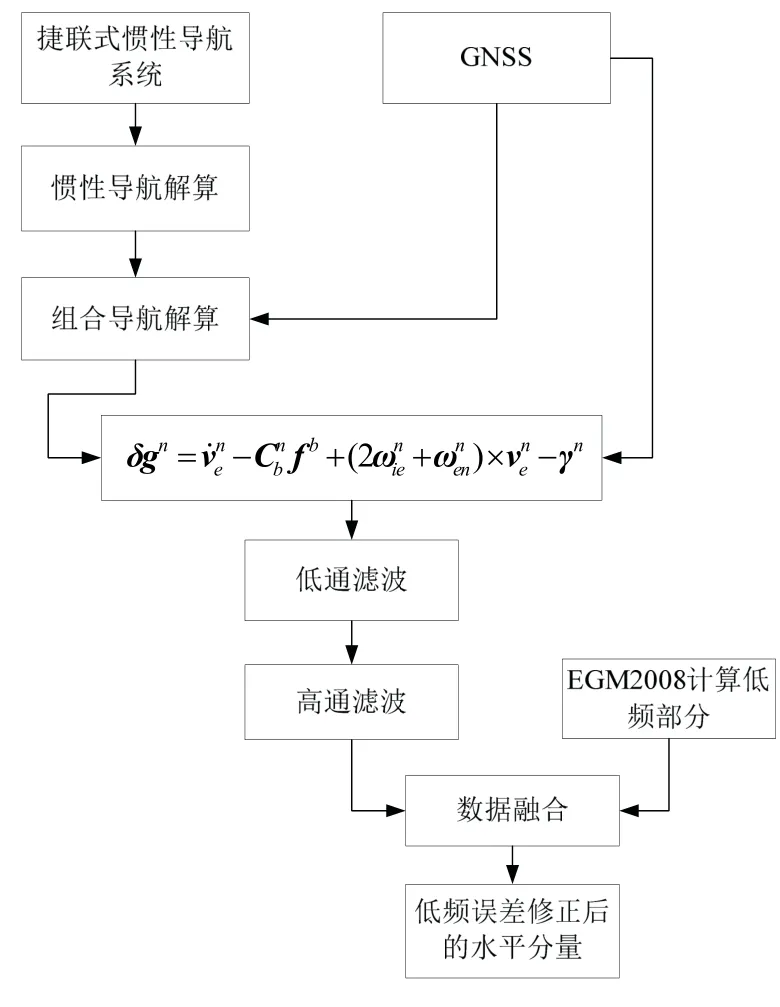
图3 数据处理流程图Fig.3 Data processing flow chart
步骤1:利用捷联式惯性导航系统中的加速度计和陀螺数据进行惯性导航解算;
具体步骤如下:
通过访谈发现,当问到“家乡与昆明的异同点”时,留学生经常会围绕空气、天气、饮食、建筑、生活等来回答,例如:“昆明空气很好,就是有点冷”,“昆明的天气和我的国家一模一样”,“我的家乡很拥堵,交通也不是那么方便,在昆明坐公交可以去很多地方”,“昆明很多东西我都吃不惯,我喜欢吃泰国菜”,“昆明的很多街道都很像”等。在一定程度上可以归纳出,留学生在城市尺度上的地方感主要是在宜人的气候条件、便捷的生活、不合胃口的饮食、无地方性的城市建筑中形成的。
步骤2:通过GNSS 获得载体的位置、速度和加速度信息;
步骤3:将GNSS 的位置和速度信息作为外部观测,结合惯性导航解算的结果进行组合卡尔曼滤波,估计出导航误差参数并进行反馈校正以提高比力的测量精度;
步骤4:利用公式(3)计算出重力扰动三分量(示意图如图4所示,图4~7 中所示横坐标皆为波长);
一是由惯导系统测量或计算得到,包括比力fb和转换矩阵Cbn;
1)施肥要求。亩施雨露水稻专用肥(15-15-15)40公斤作基肥,栽后一周亩施尿素5~6公斤,结合化学除草作分蘖肥,亩施尿素7~8公斤、氯化钾7公斤作穗肥。
无论是西方文明发展演进逻辑,还是中国文明自信演进逻辑,都是人类建设美好家园的路径选择。研究两大文明演进的起点、逻辑展开和逻辑归依,有助于厘清近代以来人类社会的发展逻辑,有助于世界各国探索和选择发展路径,也有助于构建中国文明自信演进的话语体系。
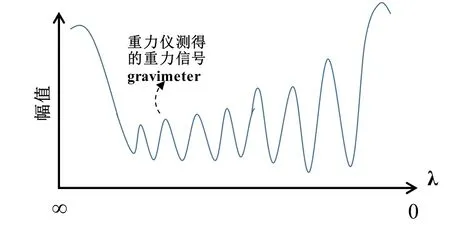
图4 步骤4:根据公式(3)得到的重力信号Fig.4 Step 4: Gravity information calculated from Eq.(3)
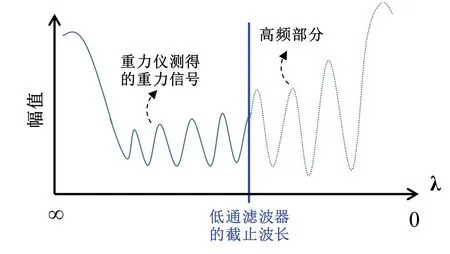
图5 步骤5:对步骤4 得到的重力信号进行低通滤波以去除高频噪声Fig.5 Step 5: Low-pass filtering is performed for the gravity information obtained in step 4 to remove the high frequency noise
步骤6:利用高通滤波器将重力测量结果中受低频姿态误差影响的低频部分去除(示意图如图6所示)。高通滤波器的截止频率根据舒勒周期来确定,理想情况下为舒勒周期的倒数,由于滤波器过渡带的存在,实际使用中可适当增大高通滤波器的截止频率(即减小相应波长)以保证低频部分能被充分滤除。
步骤7:利用EGM2008 模型通过公式(11)和(12)计算重力扰动的两个水平分量,计算的阶次由步骤6中高通滤波器截止频率对应的空间分辨率来决定,公式如式(13)所示,其中空间分辨率的单位是度。

步骤8:将经过步骤5 和步骤6 之后得到的重力水平分量与步骤7 得到的重力水平分量低频部分EGM2008 计算值相加即可得到最终的重力水平分量(示意图如图7所示),在此结果中,由姿态误差引起的低频误差已经得到了消除。
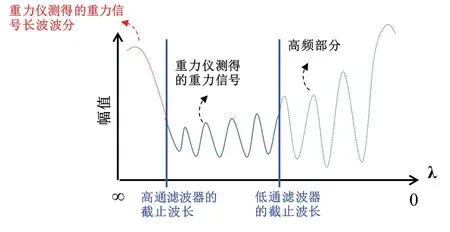
图6 步骤6:对步骤5 得到的重力信号进行高通滤波以去除包含姿态误差的低频部分(长波部分)Fig.6 Step 6: High-pass filtering is performed for the gravity information obtained in step 5 to remove the low frequency(long wavelength) part containing attitude error
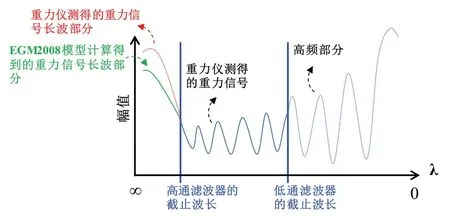
图7 步骤8:将经过步骤5 和6 得到的重力水平分量加上步骤7 得到的EGM2008 低频重力水平分量计算值Fig.7 Step 8: Adding the EGM2008 low-frequency gravity horizontal components calculated by step 7 to the gravity horizontal components by step 5 and 6
4 算 例
2010年5月,国防科技大学和航空物探遥感中心研制的捷联式重力仪SGA01(如图8所示)在山东的东北部海域进行了飞行试验。

图8 SGA01 示意图Fig.8 Photograph of SGA01
重力仪所采用的惯性元件包括加表和陀螺,其中陀螺漂移为0.004 ° /h。飞行试验载机为Cessna208,驾驶员通过自动驾驶仪来控制飞机的飞行,为了避免强对流气象条件对测量作业的影响,飞行试验选择在天气情况良好的时候进行。测量过程中飞行平稳,飞机保持匀速直线等高度飞行,飞行试验的平均飞行高度为400 m,平均飞行速度为60 m/s。
在这次试验中,SGA01 系统进行了重复测线的飞行以检验系统的内符合精度(如图9所示),包括6条东西方向的重复线,每条重复测线的有效长度为100 km。
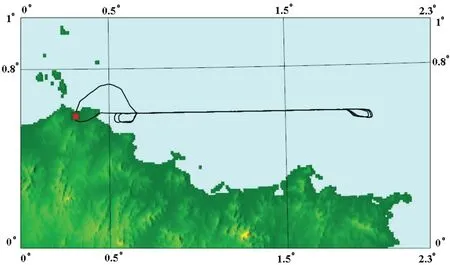
图9 山东试验重复飞行测线(使用相对坐标)Fig.9 Repeat flight lines in the Shandong test(using relative coordinate)
这次试验中,在6 条东西向测线上得到的原始水平分量如图10 所示,空间分辨率为4.8 km。从图10中可以看出,由于低频误差的存在,各条重复测线得到的结果之间存在较大的偏差,内符合精度统计见表1,标准差和均方差差别较大(尤其是北向分量)的原因正是由于低频误差的存在。本次试验中所采用的陀螺其漂移为0.004 ° /h,根据式(10)估计出的重力扰动水平分量的误差为14.05 mGal,与表1所示的北向分量均方差基本一致。经过步骤5 的低通滤波和步骤6的高通滤波后得到的重力扰动水平分量如图11 所示,为了将水平分量中的低频部分充分滤除,高通滤波器的截止频率选为0.00079 Hz(1/1266 s)。那么,高通滤波所滤除部分的波长大于76 km(1266 s×60 m/s),对应EGM2008 的阶数用式(13)计算为512 阶(1°对应的空间分辨率大约是108 km)。EGM2008 计算得到的512 阶重力扰动水平分量如图12 所示。最后将EGM2008 计算得到的重力扰动低频部分加上图11 所示的部分得到如图13 所示的最终结果,内符合精度见表2。比较表1和表2可以发现,水平分量中的低频误差得到了有效的消除,北向分量的均方差由16.95 mGal 改进为2.53 mGal,东向分量的均方差由5.43 mGal 改进为2.99 mGal。
人人都说内蒙古的羊肉好吃。为什么好吃?其实也没什么奥秘,无非内蒙古的羊是吃沙葱的羊,沙葱本身去膻气,羊肉固然就少有膻味。
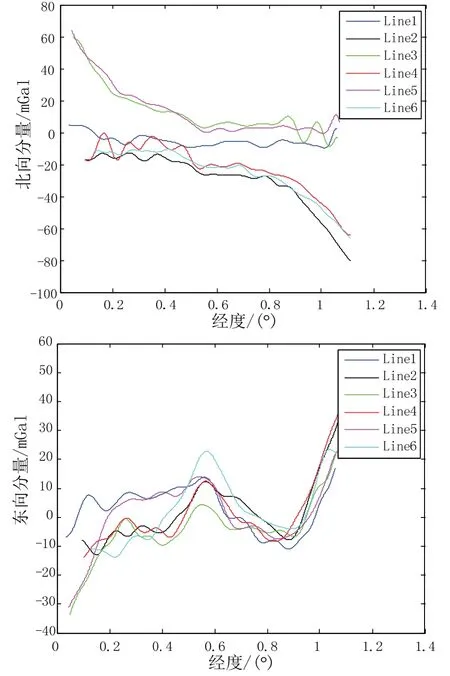
图10 6 条东西向测线上得到的原始重力扰动水平分量Fig.10 The original horizontal components obtained from the six survey lines in the east-west direction
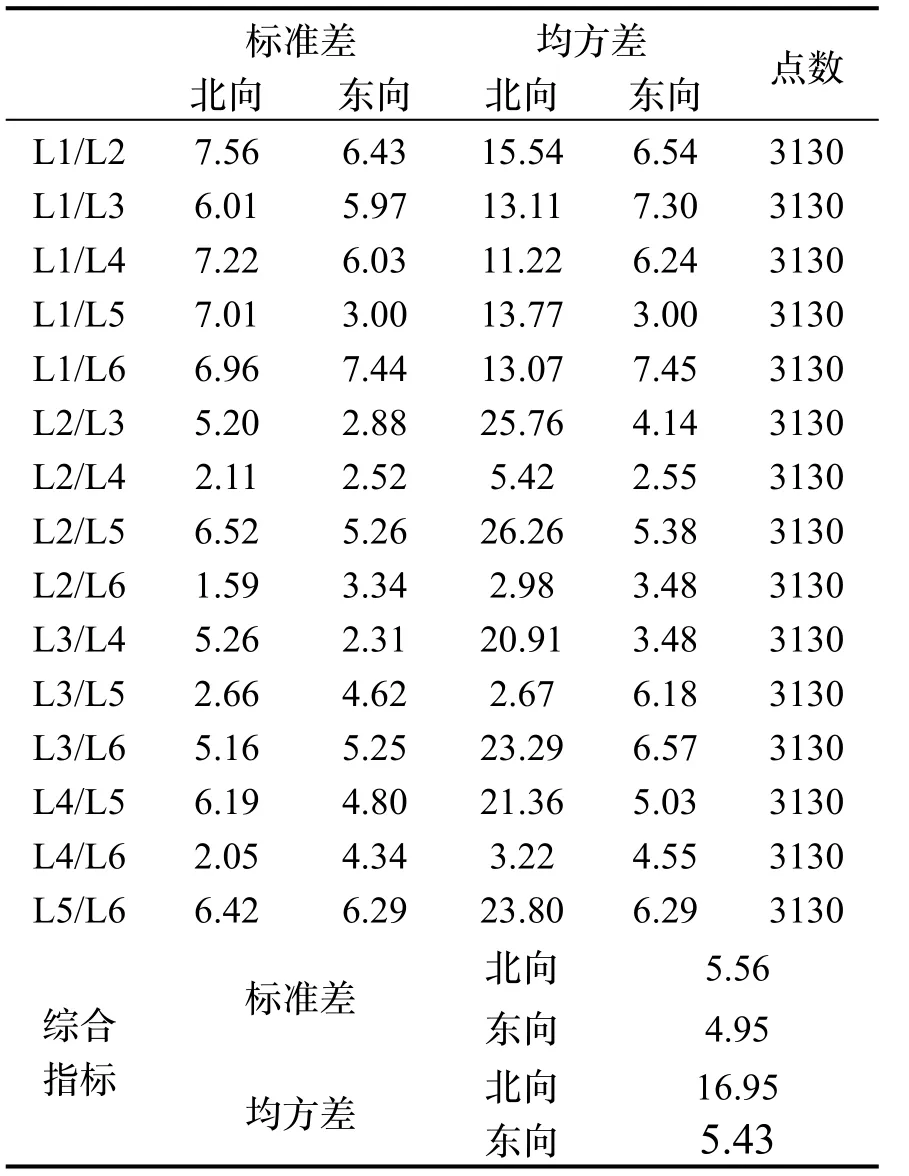
表1 山东海域试验原始重力水平分量内符合精度(mGal)Tab.1 The repeatability of original horizontal components in the Shandong test (mGal)
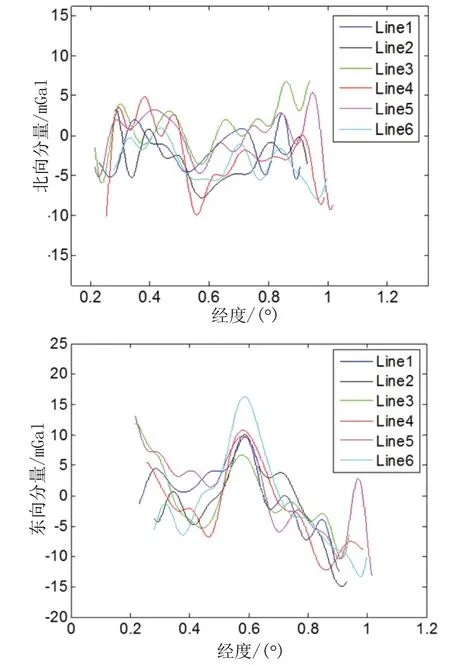
图11 6 条东西向测线上经过步骤5 和步骤6 后得到的重力扰动水平分量Fig.11 The horizontal components obtained from the six survey lines in the east-west direction after step 5 and step 6
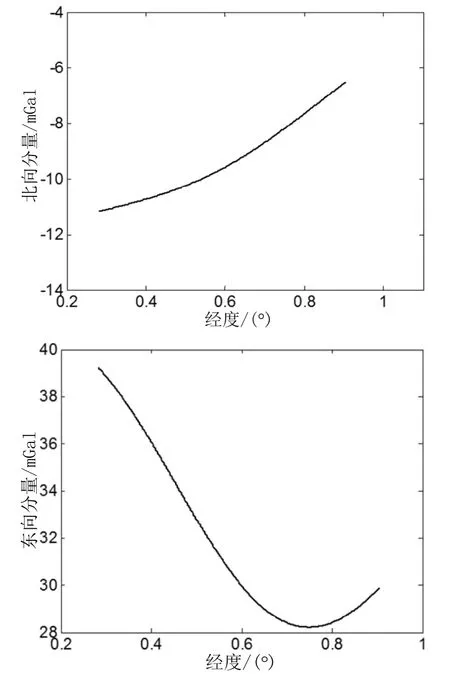
图12 EGM2008 计算得到的512 阶重力扰动水平分量Fig.12 512-order horizontal components calculated from EGM2008
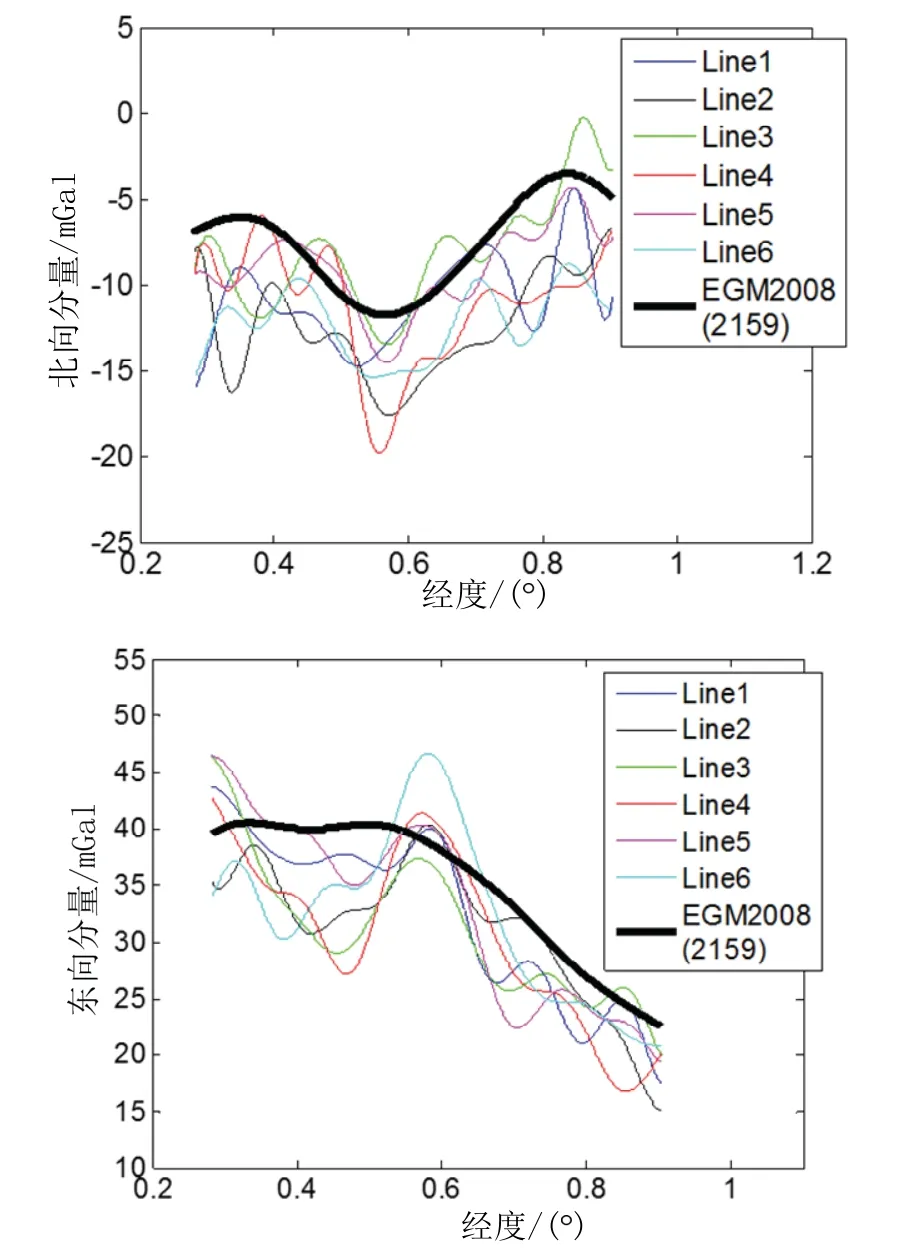
图13 6 条东西向测线上经过步骤5 和步骤6 后得到的重力扰动水平分量Fig.13 The horizontal components obtained from the six survey lines in the east-west direction after step 5 and step 6
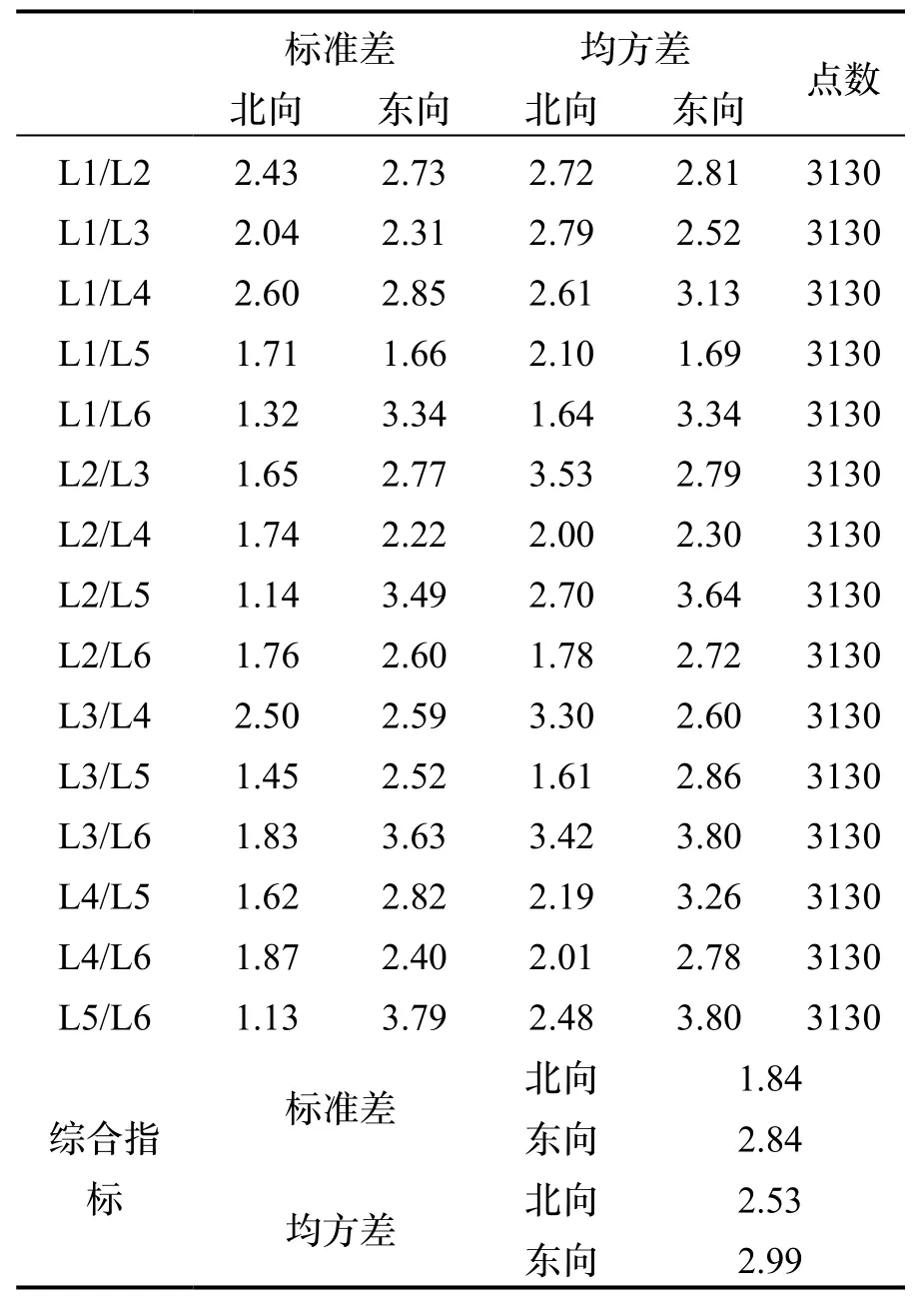
表2 山东海域试验最终重力水平分量内符合精度(mGal)Tab.2 The repeatability of final horizontal components in the Shandong test (mGal)
5 结 论
在不同类型的航空重力仪中,基于捷联式惯性导航系统和三轴平台式惯性导航系统的重力仪不仅可以进行重力标量测量,还可以进行矢量测量。其中基于捷联惯导系统的捷联式航空重力仪具有结构简单、体积重量小、操作简便等优点,是重力仪的一个发展方向。本文对捷联式重力矢量测量的误差机理进行了理论分析,并通过实测数据对水平分量中的误差进行了处理,得出以下结论:(1)捷联式航空重力仪测量得到的重力扰动水平分量主要受到低频误差的影响,这一低频误差主要是由加速度计测量误差和姿态误差引起的。
搜集相关文献,总结以往研究成果,提出本研究的基本思路,并在此基础上构建学生数学基本活动经验实践研究的研究体系。
(2)用本文所述方法对捷联式航空重力仪水平分量测量结果进行处理,水平分量内符合的均方差得到了明显的提升,在测量空间分辨率4.8 km 的条件下,北向分量的均方差由16.95 mGal 改进为2.53 mGal,东向分量的均方差由5.43 mGal 改进为2.99 mGal。
