基于CPLD的增量式调焦编码器读出电路的设计
2020-12-14雷增强许辉勇沈良吉陈志学
雷增强,许辉勇,程 刚,沈良吉,陈志学
基于CPLD的增量式调焦编码器读出电路的设计
雷增强1,许辉勇2,程 刚1,沈良吉1,陈志学1
(1. 西安应用光学研究所,陕西 西安 710065;2. 西安微电子技术研究所,陕西 西安 710065)
在红外热像仪调焦系统设计中,通过电机带动调焦镜组沿直线导轨往复运动,从而对调焦镜组的位置精确变化实现焦距的变化。为了精确控制调焦镜组的位置,调焦控制系统需要高分辨率的编码器实时反馈调焦镜组的位置,以实现对调焦镜组的闭环控制。红外热像仪调焦控制系统中采用增量式光电编码器作为调焦镜组位置的反馈测量元件。针对增量式编码器的特点,利用CPLD(complex programmable logic device)丰富的逻辑资源和可编程的灵活性,设计了一种读出电路,可以实时精确反馈调焦镜组的位置。经实际项目验证,该方案可以实时并精确地读出增量式光电编码器的位置信息,具有一定的抗干扰能力,可以实现高精度的位置伺服控制,满足系统要求。
闭环控制;增量式光电编码器;CPLD;读出电路
0 引言
红外热像仪调焦系统是通过改变光学组件之间的相对位置来实现焦距变化,从而完成多个视场成像的。在现有工程样机调焦控制过程中,通过步进电机带动红外热像仪调焦镜组的位置精确变化,从而实现产品焦距的变化。在热像仪的调焦机构中,位置传感器固定在电机驱动的调焦镜组支架上[1],使其滑动位置与调焦镜组的位置变化保持一致,于是就可以通过此位置传感器来实现调焦镜组位置的实时性反馈,实现调焦闭环控制。在传统的红外调焦控制系统中,由于电阻式角位移传感器的结构简单、易于制造、价格便宜、性能稳定、输出功率大[2],常常用作获取位置变化,但是其分辨率低。在高精度的调焦控制系统中,电位器式传感器就无法满足设计要求,因此必须使用高分辨率的传感器来获取位置变化。
光电编码器在现代电机控制系统中常用以检测转子的位置与速度,是通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的高精度角位置测量传感器。由于其具有分辨率高、响应速度快、体积小、输出稳定等特点,被广泛应用于电机伺服控制系统中[3]。光电编码器分为绝对值编码器和增量式编码器两种,鉴于绝对式光电编码器价格高、制造工艺复杂,不易实现小型化的缺陷,增量式编码器具有成本低、测角测速精度高,可以实现小型化等优势[4]。在红外热像仪调焦控制中,增量式编码器被用于检测闭环控制的位置反馈信号。
增量式光电编码器有这样一个特点:编码器每产生一个输出脉冲信号就对应一个增量位移,但是不能得到输出轴转动的绝对位置信息。增量式光电编码器能够产生与位移增量等值的脉冲信号,提供一种对连续位移量离散化或增量化以及位移变化的传感方法,是相对于某个基准点的相对位置增量[5]。增量式光电编码器的输出信号为方波信号A、B信号及Z基准定位信号,A、B信号波形相同,而在相位上相差90°,Z信号计算增量式编码器轴转过的圈数。增量式编码器每旋转一周,A与B输出脉冲个数相同,其脉冲数决定了增量式编码器的精度[6],通过读取编码器的输出脉冲数(A/B)和编码器轴转过的圈数(Z),便可计算出其相对位移量。由于增量式光电编码器不具有计数和接口电路,因此本文利用复杂可编程逻辑器件(Complex Programmable Logic Device, CPLD)内部丰富的逻辑资源和可编程的灵活性,设计出一种基于CPLD的增量式编码器读出电路,具备分辨精度高、性能可靠、调试维护灵活等优点,并行输出计数结果与单片机通信。
1 接口电路顶层设计
增量式编码器直接利用光电转换原理输出3组方波脉冲A、B、Z相。其中A、B为两信号相位相差90°的正交方波脉冲,A相或B相的每个脉冲代表调焦镜组旋转了一定角度。Z相每旋转一圈输出一个脉冲。由于增量式编码器只输出方波脉冲,所以它自己不能记忆自己的旋转方位,需要计数器来计数。此外,需要通过A、B的两脉冲的相位关系来确定调焦镜组的旋转方向。转动中,A相超前B相90°,则转动方向为正向;B相超前A相90°,则转动方向为反向,如图1[7]所示。
本设计选用的增量式光电编码器型号为R219,其主要的性能指标有:
①光电编码器的分辨率为16384CPR,即每旋转一圈(360°)输出16384个脉冲;
②最高转速10000 rpm;
③编码器输出的差分信号分成3组:A+、A-、B+、B-、Z+、Z-,其中A+和A-、B+和B-、Z+和Z-分别为差分输出。
在设计过程中需要先将3组差分信号转换成单端信号输入到CPLD管脚上。本设计选用AM26 LV32IDR四路差分线接收器,可以完成三路差分信号转换成3.3V单端信号输出的功能。如图2所示。
鉴于光电编码器的分辨率为16384CPR,即每旋转一圈(360°)输出16384个脉冲,分辨精度为:
360°/16384=0.0219°
根据项目实际需要,要求编码器的可分辨精度小于0.015°。因此设计中利用CPLD实现编码器的输出脉冲信号的4倍频,这样编码器每旋转一圈(360°)输出16384×4个脉冲,即65536个信号。对编码器的输出脉冲信号4倍频后,编码器的分辨精度可以达到:
360°/65536=0.0054°
可见对编码器的输出脉冲信号4倍频后,编码器的分辨精度得到了大幅度提升,完全可以满足项目需要。
设计中采用ALTERA公司的CPLD,型号为10M50SCE144I7G。主时钟选用16M晶振,可以满足设计需要。
采用自上而下的模块化设计方法,基于CPLD的增量式编码器读出电路顶层设计方案如图3所示,分为信号去抖及整型、信号四倍频、转向识别、脉冲计数、圈数计数、输出数据有效检测、并行输出7个软件模块。其中零位信号作为调焦控制中的基准信号。
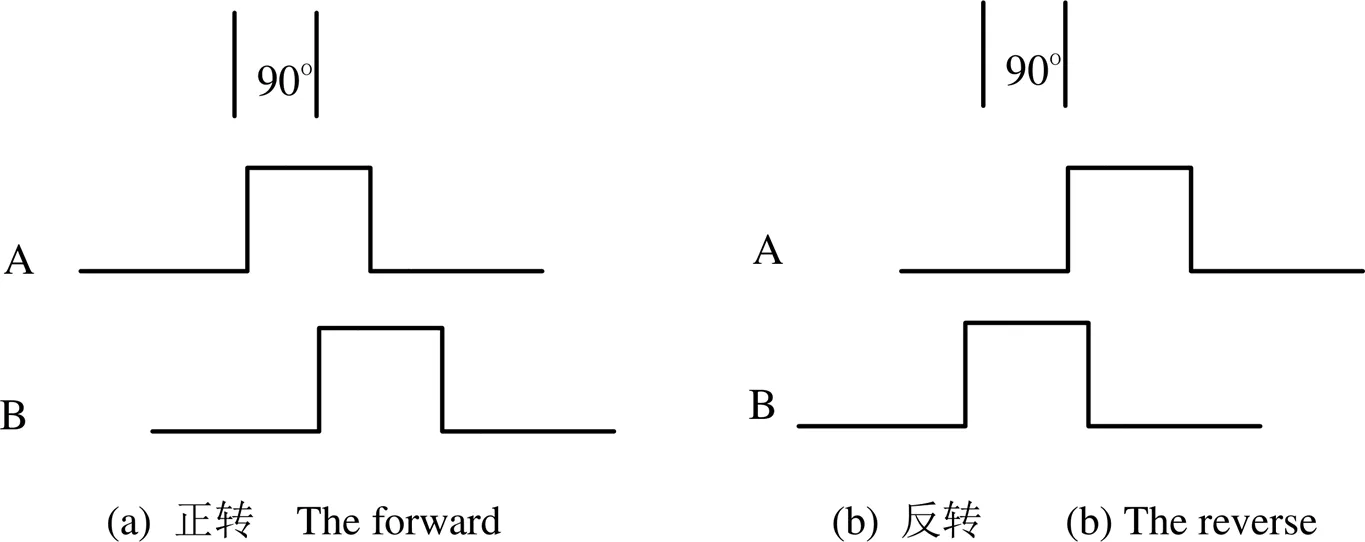
图1 增量式编码器正转和反转
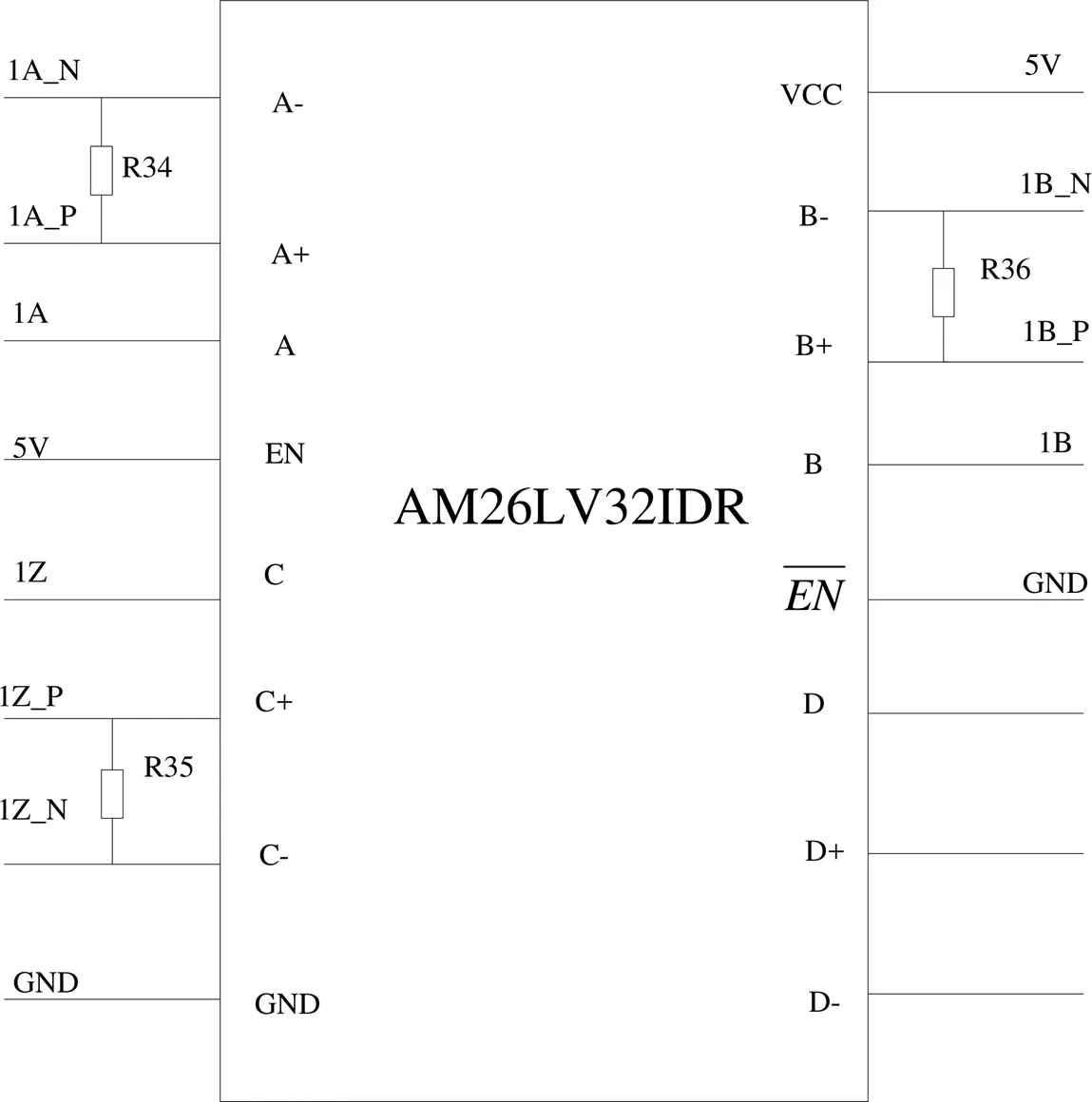
图2 差分信号转单端信号
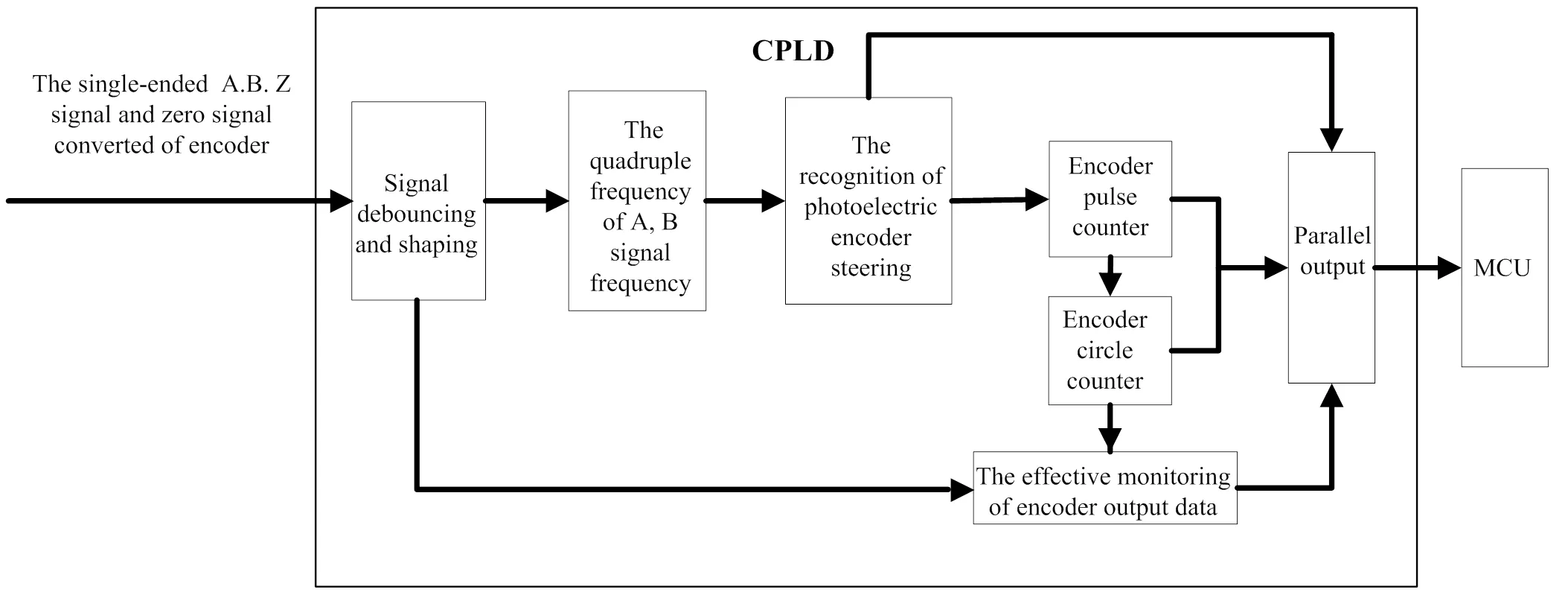
图3 编码器接口电路顶层设计图
1.1 信号去抖及整型模块
经芯片AM26LV32IDR转换的编码器单端信号A、B、Z信号,以及零位信号送到CPLD的输入端,为了消除信号的尖脉冲干扰,提高系统的抗干扰能力,保证信号的完整性,输入到CPLD的信号都必须经过D触发器的脉冲整型。D触发器的输入信号分别为a、b、z、sig_zero,输入时钟的频率要小于A信号的频率,本文设计的输入时钟频率为A信号频率的3/4。对应的输出信号为a_ff1、b_ff1、z_ff、sig_zero_ff。同时为了滤除信号的高频杂波,设计了低通滤波器,低通滤波器的截止频率为A信号频率的1.1倍,实现了对编码器输出信号的滤波和整型,这样便解决了编码器差分传输过程中带来的信号畸变,提高了抗干扰能力。
1.2 信号四倍频模块
由于增量式编码器的可分辨精度无法达到项目要求,因此本设计提出通过软件四倍频的灵活方式来增加编码器每旋转一圈的输出脉冲数[8],即提高编码器的可分辨精度。
增量式编码器的输出方波信号A、B波形相同,仅在相位上相差90°。将A、B信号分别经过一个D触发器延时一个时钟,D触发器的输入信号为a_ff1、b_ff1,输出信号为a_ff2、b_ff2。利用数字信号处理学的相关知识可以实现A、B信号的四倍频。sig_fclk为四倍频模块输出信号。
1.3 编码器转向识别模块
热像仪伺服控制系统通过A、B的两脉冲的相位关系来确定调焦镜组的旋转方向。增量式编码器转动中,当A相超前B相90°,则转动方向为正向;当B相超前A相90°,则转动方向为反向。结合图1的编码器输出脉冲图,在A的信号脉冲下降沿时,如果B信号脉冲为高电平(1),则表示编码器正转,方向标志信号sig_dir记为1;在A的信号脉冲下降沿时,如果B信号脉冲为低电平(0),则表示编码器反转,方向标志信号sig_dir记为0。这样便可以轻松识别编码器的转向。
1.4 编码器脉冲计数模块
增量式光电编码器旋转一圈输出16384个脉冲,经过信号四倍频模块后,实现了输出脉冲的四倍频,这样编码器旋转一圈,输出65536个脉冲信号sig_fclk。首先利用编码器的清零信号对编码器脉冲计数器清零,然后利用方向标志信号sig_dir进行计数方向选择。当sig_dir=1时,此时表示光电编码器正转,计数器coun进行加1操作;若sig_dir=0时,此时表示光电编码器反转,计数器coun进行减1。这样便可以实现对编码器脉冲的精确计数。
1.5 编码器圈数计数模块
编码器圈数计数可以有两种方式:一种利用清零信号对Z信号进行清零,然后利用方向标志信号sig_dir对Z信号进行计数。当sig_dir=1时,此时表示光电编码器正转,对计数器圈数cirl_coun进行加1操作;若sig_dir=0时,此时表示光电编码器反转,对计数器圈数cirl_coun进行减1操作。另一种计数方式就是利用编码器脉冲计数器来进行圈数计数,在设计中将编码器脉冲计数器coun设置成24bit,这样高8位便是编码器圈数,低16位对应编码器脉冲计数值。第一种计数方式在项目中使用时,发现如果编码器在进行圈数计数时发生抖动时,方向控制信号会出现错乱,便会导致编码器圈数计数器计数错码。第二种方式由于是采用编码器脉冲计数器“进位”方式对编码器圈数进行计数,即使在计数中偶尔出现抖动,计数偏差也可以控制在编码器脉冲计数器中,并不会对编码器圈数计数器产生误码影响。因此采用第二种方式对编码器圈数进行计数。
1.6 编码器输出数据有效检测模块
由于热像仪伺服控制系统是通过对编码器的计数来实时检测调焦镜组位置,从而实现闭环控制。编码器的零位控制信号至关重要。因此要求热像仪伺服控制系统每次上电时,必须有个寻找零位控制信号的过程。而在编码器找到“零位”之前,编码器的计数器值是不受控制的,也就是此时的计数器处于失控状态,并不能用来检测调焦镜组的位置。只有当编码器找到零位控制信号后,编码器的计数器值才是有效的,才能用于检测闭环控制的位置反馈信号。编码器输出数据有效检测模块主要功能是检测编码器计数值何时有效,并将有效计数值锁存。
1.7 并行输出模块
并行输出模块主要是将编码器输出数据有效检测模块锁存的有效计数值并行输出到单片机的I/O口上。
2 硬件时序仿真及结果分析
利用QuartusII11.0的signalTap II Logic Analyzer实时捕获关键信号的时序仿真结果如图4和图5所示.
图4增量式编码器正转时,sig_dir=1,编码器可以根据四倍频的脉冲信号实现准确稳定计数增加。图5增量式编码器反转时,sig_dir=0,编码器可以根据四倍频的脉冲信号实现准确稳定计数减少。

图4 编码器正转仿真结果
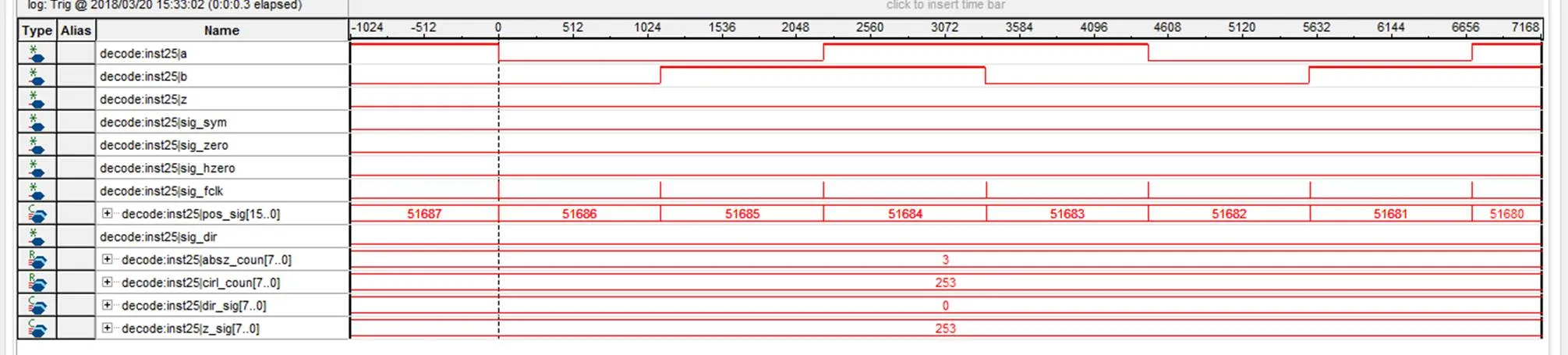
图5 编码器反转仿真结果
3 结论
利用CPLD软件实现灵活,随时可以修改,在线调试方便的特点,设计出增量式调焦编码器读出接口电路。本文根据实际工程项目需要,采用自上而下的模块化设计方法[9],设计出满足调焦伺服系统需要的编码器读出电路,可以高精度实现调焦镜组位置的实时性反馈,完成伺服控制的闭环控制。通过硬件调试,利用Quartus中Signal TapII实时捕获和抓取关键信号,通过分析验证,编码器读出接口电路时序正确,可以实现工程需要。较利用电子元器件搭建的硬件电路,该接口设计电路集成化高、易于修改、方便调试、便于维护、适用性好,可稍加修改用于其它利用编码器获取位置信息的工程项目中。
[1] 王建瑞. 基于红外图像的自动调焦技术[J]. 光电技术应用, 2018, 33(3): 3-5.
WANG Jianrui. Auto focusing technology based on infrared image[J]., 2018, 33(3): 3-5.
[2] 郭艺丹. 电位器式角位移传感器实验综述[J]. 吕梁教育学报, 2018, 35(4): 1.
GUO Yidan. Summary of potentiometer type angular displacement sensor experiment[J]., 2018, 35(4): 1.
[3] 刘晴晴, 韩利军, 任磊, 等. 基于增量式光栅编码器的高精度角位移测量方法[J].航天控制, 2017, 35(3): 3-5.
LIU Qingqing, HAN Lijun, REN Lei, et al. High-precision angular displacement measurement method based on incremental grating encoder[J]., 2017, 35(3): 3-5.
[4] 马程浩. 光电轴角编码器的检测方法分析及研究[J]. 信息科学报, 2018(18): 2-3.
MA Chenghao. Analysis and research on detection method of photoelectric shaft encoder[J]., 2018(18): 2-3.
[5] 黄雍囥, 洪占勇, 文长明. 基于FPGA的增量式编码器细分方法的研究[J]. 国外电子测量技术, 2017, 12(36): 3.
HUANG Yongxi, HONG Zhanyong, WEN Changming. Research on the subdivision method of incremental encoder based on FPGA[J]., 2017, 12(36): 3.
[6] 刘小树, 万秋华, 杨守旺, 等. 基于FPGA的增量式编码器误差自动监测系统[J]. 仪表技术与传感器, 2017(2): 3-4.
LIU Xiaoshu, WAN Qiuhua, YANG Shouwang, et al. FPGA-based incremental encoder error automatic monitoring system[J]., 2017(2): 3-4.
[7] 岳振, 顾海峰, 李范明. 一种编码器实时读出电路设计及处理方法[J]. 科学技术与工程, 2013, 13(20): 5956.
YUE Zhen, GU Haifeng, LI Fanming. A real-time readout circuit design and processing method for encoder[J]., 2013, 13(20): 5956.
[8] 王立锦, 刘亚东, 焦让, 等. 磁旋转编码器四倍频电路分析与集成化设计[J]. 电子器件, 2005, 28(2): 359-360.
WANG Lijin, LIU Yadong, JIAO Rang, et al. Analysis and integrated design of quadruple frequency circuit for magnetic rotary encoder[J]., 2005, 28(2): 359-360.
[9] 陈楚, 吕石磊, 孙道宗, 等. 基于FPGA的自顶向下乘法器电路设计[J]. 数字技术与应用, 2017(11): 2-3.
Chen Chu, Lu Shilei, Sun Daozong, et al. Circuit design of top-down multiplier based on FPGA[J]. Digital Technology and Application, 2017(11): 2-3.
Design of Readout Circuit of Incremental Focusing Encoder Based on CPLD
LEI Zengqiang1,XU Huiyong2,CHENG Gang1,SHEN Liangji1,CHEN Zhixue1
(1.,710065,; 2.,710065,)
In the focusing system design of an infrared(IR) imager, the motor drives the focusing lens group to reciprocate along the linear guide rail to change the position of the focusing lens group accurately and to change the focal length. To control the position of the focus lens group accurately, the focus control system requires a high-resolution encoder to reflect the position of the focus lens groupto realize closed-loop control of the group. In the focusing control system of the IR imager, an incremental encoder is used to feedback the position of the focusing lens group. According to the characteristics of the incremental encoder, because of the rich logic resources and programmable flexibility of the complex programmable logic device, a readout circuit is designedthat can accurately feedback the position of the focusing lens group in real time. Verification in an actual project demonstrated that this scheme can read out the position of the incremental encoder accurately in real time, has reliable anti-interference ability, and meets the system requirements of high-precision position control.
closed-loop control, incremental optic-electric encoder, CPLD, readout circuit
A
1001-8891(2020)11-1029-05
2019-12-21;
2020-07-13.
雷增强(1987-),男,硕士,工程师,主要从事红外技术应用和红外系统信号处理技术研究。E-mail:704962189@qq.com。
