狭缝间液滴行为检测实验系统的开发
2020-12-11何利华施锦磊
何利华,施锦磊,冯 凯,龚 适,倪 敬
(杭州电子科技大学机械工程学院,杭州 310018)
0 引言
机器中有许多不同形式的摩擦副,摩擦不仅会造成能量损失,还会引起零件表面发热、磨损乃至失效[1],故利用润滑来减少摩擦、降低磨损[2-3]。利用微米级的油雾型液滴对摩擦副或切削区域进行有效的冷却和润滑,成为一种典型的绿色冷却润滑技术,受到科学界与产业界的认可[4]。与传统的冷却润滑技术不同,油雾型润滑大多以孤液滴的形式附着在零部件表面,渗入部件接触区域的狭缝内[5]。如对直齿轮进行油雾润滑,随着齿轮的不断转动,齿轮啮合处将发生磨损并产生摩擦温度,形成伴有温度的啮合间隙,间隙大小和角度不断变化,润滑液滴在伴有温度的变间隙内的行为演变将改变润滑形态,导致润滑效果发生改变,影响齿轮间的啮合状态[6-7]。同样地,汽车零部件的切削加工大多采用微量润滑,在伴有切削温度的刀-工-屑狭缝中,切屑和工件的塑性变形将使得狭缝间隙的大小和角度不断发生变化,影响润滑液滴的行为状态,无法达到有效的冷却和润滑[8-9]。可见,液滴在伴有摩擦温度的狭缝间的状态行为演变研究有助于进一步认识绿色冷却润滑技术。
液滴在狭缝间的演变行为研究涉及微纳技术领域,而研究微米、亚微米甚至纳米量级尺寸领域的技术已经在现代先进制造技术中占据了举足轻重的地位,也开始逐渐渗入到高等机械工程教育中的各类课程,成为重要的教学内容[10]。本文以油雾型液滴冷却润滑技术为研究背景,以培养学生创新能力为目标,结合现代机电液一体化技术的应用,设计了一套温控下多角度变狭缝间液滴行为检测教学实验系统。该设计以工业PLC自动控制技术为基础[11],嵌入模糊PID控制理论[12]、精密传感技术[13]、高速显微检测技术[14]以及机电传动控制[15]等相关基础知识,结合了《大学化学》《大学物理》《电子技术》《机电传动控制》《机械工程控制基础》等多学科综合性实验教学目的。该教学实验系统应用当前先进设备且涉及微纳技术领域,使学生更加深刻了解到当前科学技术的发展,尤其是精密自动检测技术,培养学生创新意识和探索精神,鼓励学生不断思考、尝试和努力解决实际工程问题,达到培养学生自主思考并创新性解决学习中的实践问题的要求。
1 实验系统原理与性能指标
1.1 实验系统
温控条件下多角度变狭缝间液滴行为演变检测实验装置整体设计如图1 所示,主要由狭缝间距与角度控制、模糊PID温控以及液滴行为演变监测等模块组成。具体工作原理如下:
(1)狭缝间距与角度控制模块工作原理。PLC通过高速脉冲输出接口向伺服驱动器发送正向指令脉冲;伺服驱动器根据脉冲的频率和数量,驱动并控制竖直伺服电动机Ⅰ,使其带动竖直定位滑块改变上、下载板的间距。电涡流间距传感器可向PLC 实时反馈,形成闭环控制。上、下载板的距离可以从厘米级变化到微米级,甚至亚微米级,实现平板和狭缝间的形态切换。伺服驱动器通过PLC发送的脉冲指令驱动并控制水平伺服电动机Ⅱ动作,使其同步改变上、下载板间的倾斜角度,由编码器实时反馈角度值,形成闭环控制。为方便观察,可通过竖直定位滑块上的量角器复查载板的倾斜角度。
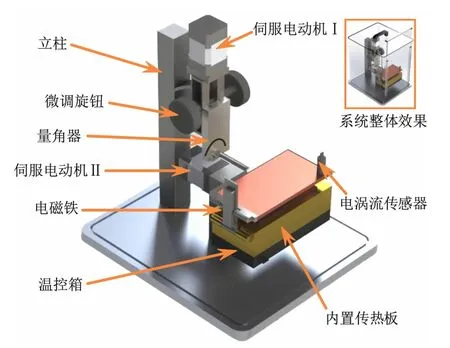
图1 实验系统主体设计图
(2)模糊PID温控模块工作原理。内置加热器必须达到快速预热及精确控制。目前工程中应用的PID控制可以达到精确的参数调节,但无法实现在设定温度的小范围内缓慢调节,采用模糊PID 控制算法来实现该传热板的恒温控制,其控制结构如图2 所示。

图2 模糊PID控制器结构
模糊PID将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制,其规律为:

式中:u(t)为PID 调节器输出;e(t)为PID 调节器输入;Kp是比例系数,Ki为积分时间常数,Kd为微分时间常数。
该方法主要是根据预设温度误差e和误差变化率ec,利用模糊控制器在线修改PID 控制中的参数Kp、Ki、Kd,以满足在不同e和ec时对控制参数有不同的要求,获得控制量u(t),完成对加热器的恒温控制,控制传热板的温度和液滴温度。该方法能够实现对被控对象的最优控制。
(3)液滴行为演变监测模块工作原理。本实验系统适用于不同黏度的液体检测。当上、下载板形成狭缝时,液滴在狭缝间的行为将发生不同的演变;当狭缝出现角度变化时,液滴受重力及载板剪切力的影响也将发生不同的演变。采用VW-9000E 高速显微镜可实现对狭缝间液滴行为状态进行实时监测,如图3 所示。
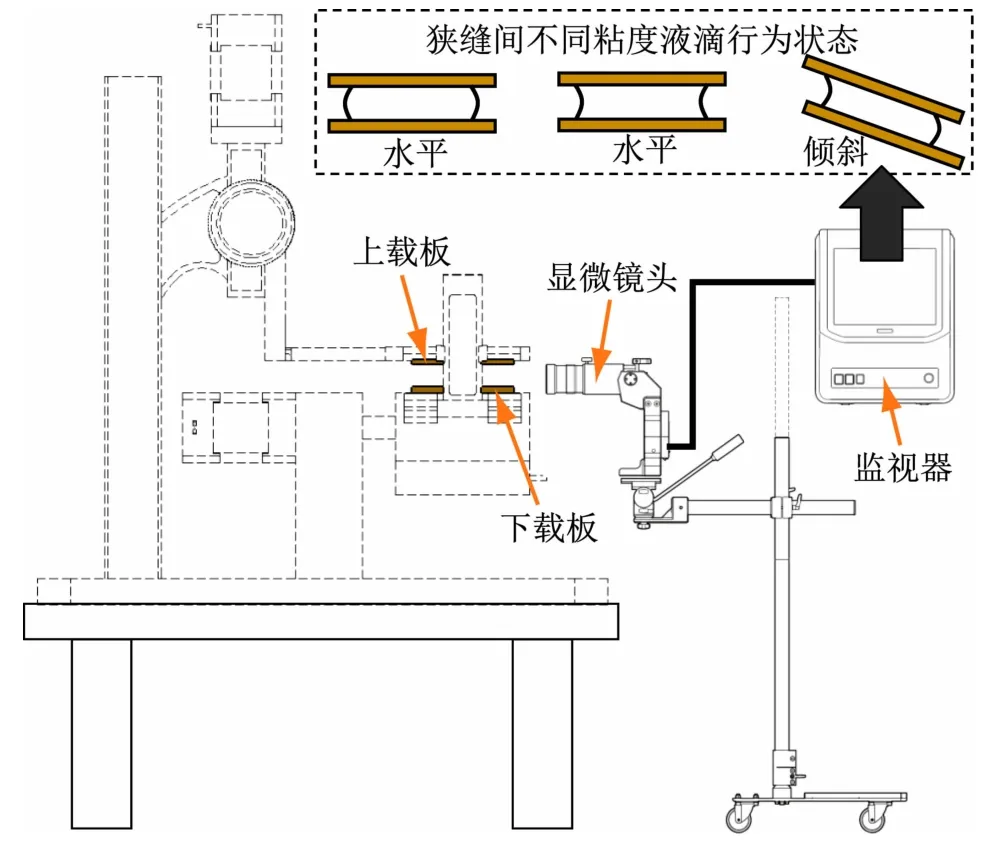
图3 液滴行为演变监测模块设计
对高速显微镜拍摄的图像进行液滴轮廓提取,即可得到液滴的流动形态和静止形态。比较相邻两帧图像液滴在水平方向上的距离变化,根据显微镜的采样时间即可得到液滴在水平方向上的即时速度,同理可以得到液滴在垂直方向上的即时速度。
1.2 实验系统的具体性能指标
本实验系统主要性能指标如下:
①温控箱温控范围:-10~120°C;
②带编码器的水平伺服电动机带动载板倾斜的倾斜范围:-60°~60°;
③微调旋钮每转一圈,竖直定位块上下移动的距离为1 mm;
④电涡流间距传感器量程:0~1 mm,±0.4 μm。
2 实验系统机械结构
狭缝间距与角度控制模块是本实验装置的核心机械部件。
2.1 狭缝间距结构
狭缝间距控制模块结构由带编码器的竖直伺服电机Ⅰ、滑块导向座、微调旋钮、上载板支架座和电涡流传感器组成,如图4 所示。
滑块导向座安装在支架侧面且与立柱相对,其侧面设有限位凸起,下端标有刻度,使其可在竖直支架上精准滑动;带编码器的伺服电动机Ⅰ安装在滑块导向座上方,并通过滚珠丝杠带动上载板支架座沿着滑块导向座上下移动,微调旋钮安装在滑块导向座侧面,实现大间距快速调整;电涡流传感器安装在上载板边缘处,将实时数据反馈给PLC,实现上、下载板间的设定间距精准控制。
2.2 角度偏转结构设计

图4 狭缝间距控制模块结构设计
狭缝角度控制模块结构由带编码器的水平伺服电动机Ⅱ、电动机座、上载板、下载板、电磁铁、内置传热器和温控箱组成,如图5 所示。

图5 狭缝角度控制模块结构设计(带温控箱)
上载板与下载板之间通过电磁铁与两个小型铰链相连,形成连杆结构:当电磁铁处于开路状态时,上载板可通过卡槽形式上下移动;当电磁铁处于接通状态时,上载板与电磁铁固定,实现上下载板联动。带编码器的水平伺服电动机Ⅱ安装在电动机座上,电动机轴通过减速装置与内置传热板固定,通过电动机轴的旋转可改变内置传热板与下载板的倾斜角度,电磁铁接通并带动上载板移动。在上载板支座架的下端刻有分度线,可实时读取载板的倾斜角度。
3 实验系统电气控制
3.1 电气系统
(1)嵌入式软PLC 控制系统。根据实验系统的间距、角度和温度控制需求,设计了一套嵌入式软PLC控制系统,如图6 所示。
该系统主要是由SMART-HMI 人机界面,S7-200系列PLC,模拟量I/O 扩展模块,数字量I/O 扩展模块、伺服驱动器,伺服电动机,电涡流传感器和温度控制器组成。在Windows操作系统中利用STEP7-Micro/Win软件进行顺序控制的设计及PLC 编程,其中系统程序以梯形图的方式进行编程,将编译结果写入PLC;利用WinCC flexible SMART V3 软件进行触摸屏界面设计并写入触摸屏设备,使人机交流更加友好。伺服系统选择ASDA-A3 系列,PLC发出的电信号通过驱动器,实现对伺服电动机的控制。PLC 通过模拟量I/O扩展模块实现对上、下载板间距(电涡流传感器)和温控箱温度(热电偶)进行实时采集;经过A/D 转换和PID运算后,通过数字量I/O 扩展模块对加热器的输出功率进行控制,实现恒温控制。

图6 实验系统控制原理设计
具体实验系统的硬件配置及其相关具体参数见表1。
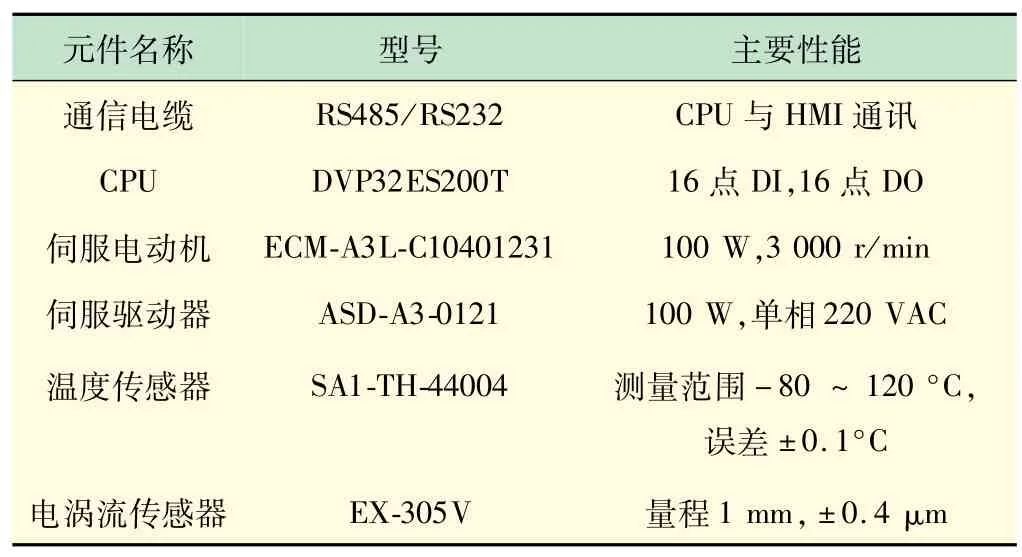
表1 PLC控制系统元器件配置
(2)伺服电动机的驱动和控制回路。图7 为实验系统中伺服电动机的驱动和控制回路,由强电回路和控制回路组成。强电回路主要为主电路电源和电动机供电电路,即通过伺服驱动器的R、S、T端子经由低压断路器MCCB 和接触器MC 接入三相电,在通过伺服驱动器的U、V、W端子接通伺服电动机绕组。控制回路主要包括控制回路电源输入端(L1C、L2C)、编码器位置输出端、编码器连接器(CN2)、Mini USB 连接器(CN4)和位置反馈信号接头(CN5)。其中,L1C和L2C端子连接单相交流电源,实现伺服驱动器主电路电源输入回路;编码器位置输出端为伺服驱动器I/O 端子的一部分,实现将编码器的A、B、Z信号以差动方式输出;CN2 接口与伺服电动机的编码器连接,实现电动机上的编码器信号回路;CN4 串行通讯端口与PC 软件连接,实现PC控制信号回路;CN5 接口链接外部位置反馈,与伺服形成全闭环的控制回路。

图7 伺服电动机的驱动与控制回路原理图
(3)信号控制回路。根据实验系统对狭缝间距、内置传热板温度以及温控箱的设计要求,设计了如图8 所示的电涡流位移传感器、温度传感器以及加热器的信号控制回路。其中模拟信号输入,传感器通过屏蔽双绞线与PLC中模拟量I/O扩展模块通道连接;双绞线的屏蔽层与接地端(PE)连接。
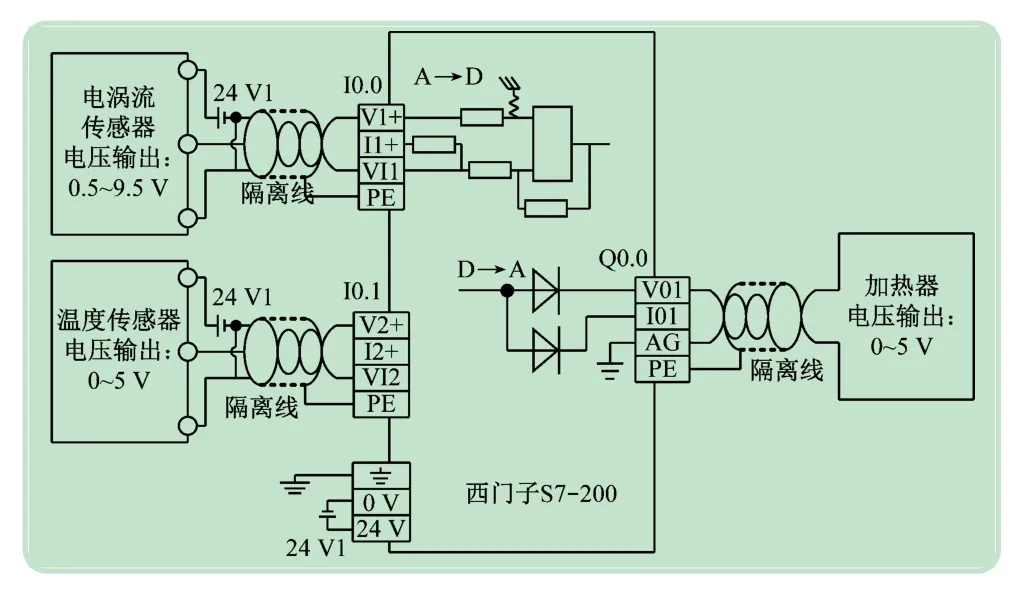
图8 实验系统模拟信号采样与控制原理图
3.2 PLC控制软件设计
在PC机中,采用STEP 7-Micro/WIN编程软件,进行实验系统的工作流程设计,温控下多角度变狭缝间液滴行为检测实验系统的自动控制流程如图9 所示。
该控制软件主要由点动控制、自动控制和参数设置等子程序组成。
点动控制子程序主要用于设备调试以及维护的情况下使用,能够分别实现对狭缝间距和载板倾角等执行元件单独点对点的控制,是实验系统的基础构成。

图9 系统自动控制流程图
自动控制子程序是根据设定的温度、角度、间距等参数进行自动运行,同时对传热板温度、偏转角度、狭缝间距进行实时监测,根据监测数据进行运行误差补偿。该子程序是本实验系统的关键程序,提供了参数自动检测和判断功能,提供了性能评价和状态报警功能。
参数设置子程序是根据实验需求进行参数设定,但不能超过测量范围,否则系统报警提示。
3.3 人机界面
在PC 机中,采用SMART 系列编辑软件WinCC flexible SMART V3 编写触摸屏界面。根据实验系统自动控制流程的设计思路,设计了相应的点动控制界面和自动控制界面。
点动测试界面可点动控制狭缝间距和载板倾角的微动控制,可以检查执行单元是否正常工作。
自动控制界面是用于控制实验系统所有子程序协同工作的界面,包括自动运行过程中根据设定参数实时记录温度和间距的数据、实时记录参数的变化。图10为实验系统自动运行时的系统界面,包括当前参数、温度监测、距离监测、参数设定,还包括自动运行、自动停止按键和系统运行、报警、停止指示灯。
4 实验设计
根据实验系统的组成与特点,可进行的教学实验如下:
(1)基于交流伺服电动机的机电传动控制实验。本实验可配合《机电传动控制》这门专业必修基础课进行课程设计,特别是针对交流伺服电动机的实验指导。结合本实验系统所选用的伺服系统,使学生更加深刻地理解单相交流伺服电动机的组成、配线、安装调试过程及其工作原理,提高感性认识和解决问题的能力,更好地掌握机电传动理论知识。

图10 实验系统自动控制监控界面
(2)基于可编程控制器的PLC 编程实验。本实验将以可编程控制器为对象,了解PLC 的基本概况,包括其组成、功能、工作方式、软件介绍等,完成可编程控制器的安装与维护;利用编程软件了解并熟悉梯形图的设计和编程方法,并结合本实验装置的硬件组成完成基本指令的编程练习、电动机正反转实验、电动机顺序启动实验等,使学生了解软件编程能力和逻辑思维能力,更深刻地认识数字运算操作电子系统的相关基础知识。
(3)基于电涡流效应原理的位移测量实验。本实验的原理为:通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,故可进行位移测量。利用本实验系统中的电涡流传感器,使学生充分了解电涡流位移传感器的工作原理和电涡流效应的应用以及接触特性阻抗的变化特性和影响因素,培养学生的科学实验精神,巩固学生的理论知识。
(4)基于模糊PID温度控制实验。本实验可配合《机械工程控制基础》这门专业必修基础课进行课程设计。区别于常规的PID 控制,在受到环境等非线性因素的影响时,模糊PID 控制可保证实验系统具有自适应控制能力。通过对PID控制算法和模糊理论的讲解,使学生了解模糊自适应PID控制理论,通过本实验系统的实际操作,建立合适的模糊规则推理出合适的系统误差及误差变化率,进行参数调整,使学生更深层次地理解PID控制中的比例、积分和微分参数,明确各项性能指标的含义,加深学生对经典控制理论的掌握,丰富学生的实践经验。
(5)液滴行为演变观测实验。利用本实验系统,针对不同配比、不同性能的溶液液滴,通过高速显微镜对液滴形态以及液迹轮廓进行观测,对比并测量相邻帧数的液迹状态,用以得出液滴的行为演变过程与即时速度,从而培养学生自我分析和解决问题的能力。
5 结语
本文所设计的温控下多角度变狭缝间液滴行为检测实验系统,具有以下的特色:
(1)融合了PLC 控制、电伺服驱动、模糊PID 温度控制、电涡流位移传感等机电液一体化控制技术,内容涵盖涉及《机电传动控制》《机械工程控制基础》《大学物理》等课程内容,能够有效满足不同高等院校完成经典机电伺服传动控制、PLC编程设计、电涡流位移传感检测和模糊PID温度控制等基础性教学实验。
(2)集电伺服驱动机构、电子元器传感技术、PLC控制系统、PC软件编程技术和高速显微检测技术于一体,软硬件丰富,功能完备,实训难易程度可根据教学目标、教学对象进行灵活调整,具有较好的教学实验设备先进性,能有效满足大学生在不同阶段的能力培养。
(3)该实验系统属于微纳系统研究领域,特别针对不同配比、不同特性的溶液液滴进行狭缝特性检测,根据检测需求设定狭缝间距、传热板温度、载板倾角,观测液滴行为演变,开展各因素对液滴行为演变影响的数据分析和讨论,能有效满足大学生以及研究生培养所需的实验设备要求,充分体现了现代机电液一体化控制技术水平,具有较高的实验和研究应用价值。
