基于实船试验的作业耙吸船对长江口深水航道通航影响
2020-12-09常俊宇李毓敏吴善刚闫化然肖英杰
常俊宇,李毓敏,吴善刚,闫化然,肖英杰
(上海海事大学 航运仿真技术教育部工程研究中心,上海 201306)
长江口12.5 m深水航道是大型船舶进出我国上海港和长江下游港口群的主要通道,担负着“长三角”地区进出口商品和大宗物资运输的重要任务,全长约92.2 km,有效宽度350 m(口外段为400 m),通航水深12.5 m(理论最低潮面下),于2010年3月贯通。[1]长江口深水航道回淤量大、回淤时空分布集中,12.5 m航道通航以来,年均维护疏浚量约8 000万m3。[2]
为提高疏浚效率,2010年交通运输部长江口航道管理局开展“耙吸船艕带泥驳联合疏浚工艺” (简称“耙吸装驳工艺”)应用研究,开发专用泥驳用于疏浚土的运输和抛泥,以实现挖运分离。为保证通航安全,长江口深水航道相关规定要求交会船舶宽度不得超过90 m。施工船组在一定程度上占用原本已紧张的通航资源,会加剧通航安全与航道疏浚维护安全之间的矛盾。因此,本文对耙吸装驳工艺与通航安全之间的关系进行分析,提出有针对性的通航安全管理措施,在确保通航和施工安全的基础上,提高耙吸装驳工艺作业时间和作业效率。[3]
1 耙吸装驳作业船组可航水域范围分析
与限于吃水大型重载船舶必须在航道边线内侧航行的情况不同,耙吸船满载吃水8.37 m,泥驳满载吃水7.50 m。目前,北槽上段边坡最小水深约10 m,北槽下段边坡最小水深在9~10 m,圆圆沙段边坡最小水深在10~11 m,耙吸装驳作业船组可在边坡水域航行和作业。工作性质决定耙吸装驳作业船组也应在包括边坡在内的长江口深水航道整个宽度断面的所有位置进行维护性疏浚作业。[4]作为《长江口深水航道(12.5 m)试通航期间通航安全管理办法》和即将实施的《长江口深水航道通航安全管理办法(试行)》提出的北槽深水航道内上行与下行会遇船舶宽度之和以不超过80 m控制的前提之一,双向交会船舶的可航水域宽度(即设计通航宽度)350 m,不得利用边坡且航迹带与设计航道边线保持富余宽度c。因此,对耙吸装驳作业船组可航水域范围和作业性质而言,不宜完全套用80 m宽度的控制标准。[5-6]双向通航宽度要素和耙吸装驳作业船组作业水域范围见图1。

图1 双向通航宽度要素和耙吸装驳作业船组作业水域范围
2 耙吸装驳作业船组和通航船舶交会宽度控制原则[7-8]
耙吸装驳作业船组对反向航行船舶交会的影响在于船组航行作业时,其航迹带可能占用设计航道通航宽度范围内的一定宽度,本质上耙吸装驳作业船组航迹带左侧边缘的位置决定了其对通航水域的占用范围。这里分析决定耙吸装驳作业船组航迹带左侧边缘界的影响因素,见图2。

图2 耙吸装驳作业船组航迹带左边界的计算要素
2.1.1计划疏浚点在航道横断面上的位置
计划疏浚点在航道横断面上的位置,即耙吸船耙头计划作业位置,用该点距右侧航道设计通航宽度边缘的距离d1表示。d1<0表示计划疏浚点在边坡上。
2.1.2风流压差角
耙吸装驳船组作业航行期间,为克服横向风流的影响,其艏向横风横流的来向偏离风流压偏角γ,以保持航迹向与航道走向一致。由于风流压偏角的出现,任一瞬间航迹带在航道横截面上的投影会大于船宽B,瞬间航迹带宽度为
A′=(B+Lsinγ)
(1)
2.1.3横向漂移
由于风和流的作用不稳定,船组航迹会左右漂移,因此规范规定的航迹带宽度还要考虑横向漂移的影响,该影响用横向漂移倍数n表示。考虑横向漂移后的航迹带宽度用A表示,可反映船舶的航迹带在一定航程内占据航道宽度的最大值。
A=n(B+Lsinγ)
(2)
显然,考虑横向漂移的影响后的航迹带宽度A与瞬间航迹带宽度的差即为船组作业航行时横向漂移的距离,用D表示为
D=A-A′=(n-1)×(B+Lsinγ)
(3)
横风横流的波动具有不稳定性。因此,船组作业航行期间横向漂移的方向也具有随机性。设船组向左右两侧漂移的概率相同,即向左或向右漂移的最大距离各为0.5L,船组单侧横向漂移的距离Dh为
Dh=0.5×(n-1)×(B+Lsinγ)
(4)
耙头向航道中心漂移的最大距离(距航道右侧边线)用d21表示。d21与d1的差lh为船组航行时单侧横向漂移的距离。
d21=d1+lh=d1+0.5×(n-1)×(B+Lsinγ)
(5)
2.1.4船体最左侧轮廓特征点向航道中心的漂移
在最不利的情况下,由于风流压偏角的存在,艏向航道中线偏离,船体最左侧轮廓特征点在左舷平行中体最前端,该点距航道右边线的距离为d22,可根据d21、耙头横向外伸距离b(取6 m)和耙头至左舷平行中体最前端的纵向距离D(取92 m)计算,即
d22=d21-b+lsinγ
(6)
耙吸装驳船组作业期间航迹带边界距航道右边线的距离d2由d22和d21中的较大者决定,即
d2=max(d21,d22)
(7)
2.2 耙吸装驳作业船组和通航船舶交会宽度控制原则
耙吸装驳作业船组航迹带左边界至设计航道通航宽度左边界的距离,即为作业船组左侧可供大型船舶交会的剩余航道宽度Wr。耙吸装驳作业船组航迹带左边界与剩余航道宽度的关系见图3。
Wr=Wd-d2
(8)
式(8)中:剩余航道宽度Wr的最大值为350 m。
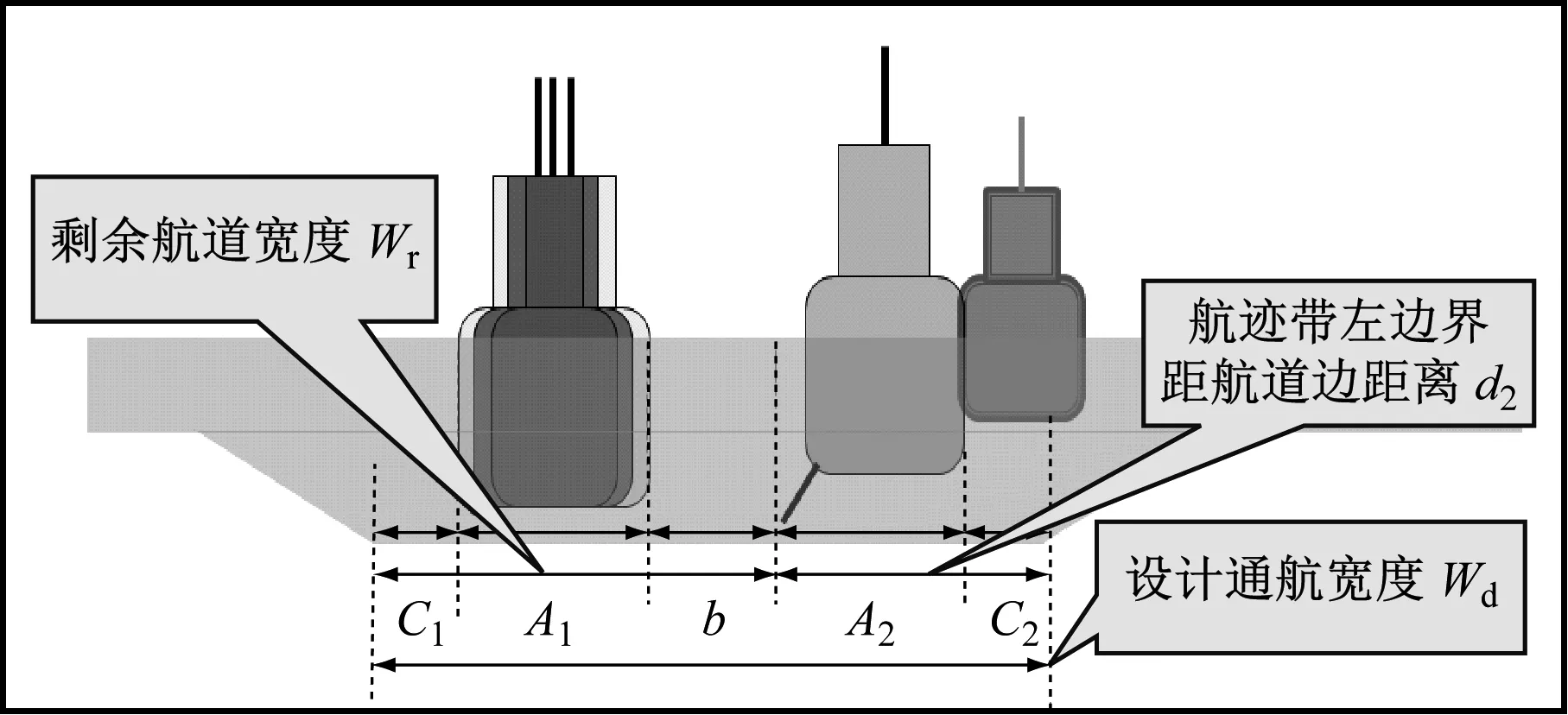
图3 耙吸装驳作业船组航迹带左边界与剩余
交会船舶需要的通航宽度Wn计算见式(9),其中船舶间富余宽度b和船舶与航道底边间富余宽度C按规范取值。
Wn=A1+C1+b
(9)
根据剩余航道宽度Wr计算满足交会船舶需要的通航宽度Wn的最大船型,可确定耙吸装驳作业船组与通航船舶交会宽度控制标准。
3 实船试验数据采集 [9-10]
3.1 试验船型
本文选取的试验对象为耙吸船“长江口01”、开底泥驳船“航驳7001”“航驳7002”“长江口驳1”和“长江口驳2”等,具体参数见表1。由于在“耙吸船艕带泥驳联合疏浚工艺”整个作业过程中,耙吸船“长江口01”为主要研究对象,运动操纵较为复杂,因此试验设备安放在耙吸船“长江口01”上进行试验数据采集。

表1 试验船舶参数
3.2 数据采集的目的
长江口深水航道耙吸装驳疏浚作业在通航安全方面的突出问题是船组在槽内作业挤占了航道的有效宽度资源,使已经相当紧张的航道有效宽度与超大型通航船舶通航宽度需求的矛盾变得更加突出。为有针对性地确定耙吸装驳船组作业期间与过往船舶交会的宽度控制标准,需根据耙吸装驳作业船组的尺度特征、操纵性能和作业特点,研究耙吸装驳船组作业位置与占用航道宽度之间的关系。为此,需掌握耙吸装驳船组在艕靠作业期间船体轮廓边缘特征点的实时坐标变化和船舶真航向的实时变化,掌握实际作业条件下风流压偏角、航迹横向漂移距离和航迹带宽度等重要航行参数,科学地评估耙吸装驳船组在作业期间的通航宽度。为此,耙吸装驳作业航行数据采集的目的为:
1) 记录耙吸船在耙吸装驳作业中的真航向。
2) 记录耙吸船在耙吸装驳作业中高精度实时船位坐标的变化。
3) 计算并研究耙吸装驳船组在作业中的航迹带宽度。
4) 根据航道边界线的位置计算耙吸装驳作业占用的航道宽度和船组与另一侧航道底边线间的剩余航道宽度。
3.3 数据采集的原则
为保证数据的真实性,保证记录的航行动态能真实地反映耙吸装驳船组的航行动态,航行数据采集以不预设操纵方案、不特别规定会遇距离和边坡利用方案及不干预驾驶人员实际操纵为前提。
3.4 数据采集设备
数据采集拟采用2套试验设备,2套设备独立工作,相互补充,互不干扰。设备套1由2套定位定向仪组成;设备套2由信标机和船舶姿态仪组成。2套试验设备功能说明见表2。

表2 试验设备功能说明
3.5 试验设备安装和使用
2套设备均需提前1 h上船安装和校准,安装完成之后可自动保存数据,对船舶的正常航行和作业不构成任何干扰。
3.5.1设备套1
定位定向仪1设备天线安装在船舶中轴线或中轴线的平行线上,设备主机放置在与天线距离相等的中间位置见图4。

图4 设备套1安装位置示意
3.5.2设备套2
船舶姿态仪设备天线安装在船舶中轴线或中轴线的平行线上,设备主机放置在与天线距离相等且靠近舯部的位置。信标机设备天线安装在尽可能靠近舯部的位置。2台设备各自采用工控机RS232串口接收数据,见图5。
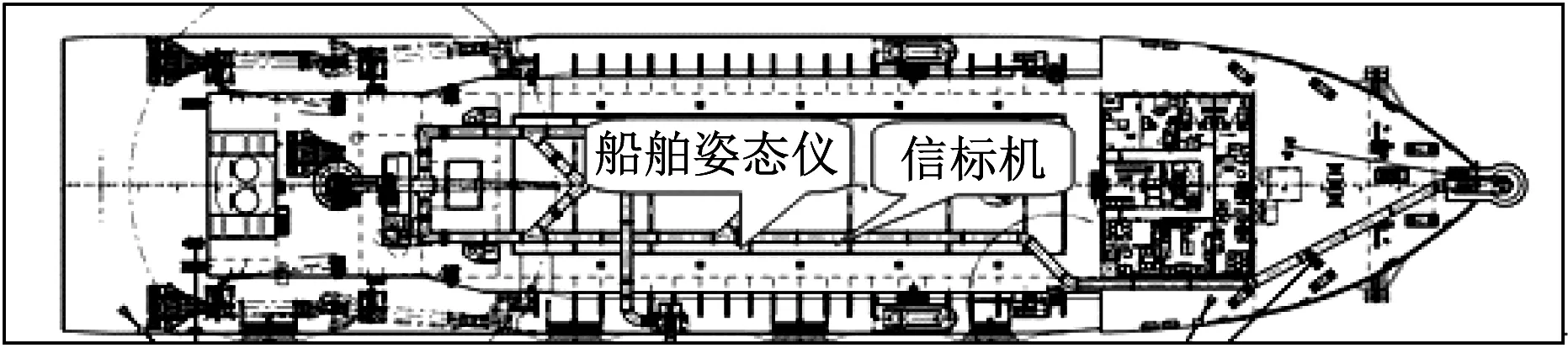
图5 设备套2安装位置示意
3.6 数据下载
在设备安装连接完成之后,启动相关设备驱动软件可自动保存数据并通过界面现场监控,需要记录的耙吸装驳作业过程完成之后,下载所记录的航行动态数据。记录的数据包括时间信息、设备主天线安装位置的经度和纬度、设备主副天线连线的真方向。定位定向仪下载的数据文本见图6。

图6 定位定向仪下载的数据文本
4 实船试验数据分析
4.1 船体平面轮廓特征点
为便于进行数据采集和分析,在船舶总布置图上准确地标注设备主天线的安装位置。确定艉左舷、艉右舷、平行中体前端左舷、平行中体前端右舷和船舶几何中心共5个特征点,在船舶总布置图上量取上述特征点与主天线的安装位置的纵、横偏移距离,根据实时记录的主天线经度、纬度和船舶真航向,计算各特征点的精确经度和纬度。船体平面轮廓特征点见图7。

图7 船体平面轮廓特征点
4.2 实船试验过程
为满足耙吸船组航行数据采集的需要,在前期设备采购和技术准备的基础上,自2016年9月起正式实施耙吸装驳作业船组实船试验。时间分别是2016年9月10—11日(中潮)、2016年9月20—21日(小潮)和2016年10月15—16日(大潮),试验累计历时6 d,共记录耙吸装驳作业船组航行数据9次,单船航行数据3次。实船试验过程见表3。
4.3 试验数据分析
4.3.1航行轨迹
根据连续变化的各特征点的准确经度和纬度,在电子海图上绘制曲线,以表示作业期间耙吸船的航行轨迹,见图8。
4.3.2航迹带瞬间宽度
耙吸船最左侧曲线和耙吸船最右侧曲线距基准线(行驶方向的左侧航道边线)的距离差即为《海港总体设计规范》定义的航迹带宽度A与漂移倍数n之比A′。该值为耙吸船轮廓在航道正横断面上投影的宽度,见图9。

表3 实船试验过程

图8 船体各特征点的航行轨迹
(10)
式(10)中:A′为航迹带瞬间宽度,m;A为航迹带宽度,m;γ为风流压偏角,(°);n为船舶漂移倍数;L为船长,m;B为船宽,m。
4.3.3风流压偏角
设备主副天线安装在船舶中轴线或中轴线的平行线上,设备记录的真方向即为船舶航行的真航向。若耙吸船在航槽内航行,航迹向应与航道走向一致,真航向与航道走向的差值即为风流压偏角γ,见图10。

图9 耙吸船航迹带图瞬间宽度图10 风流压偏角
4.3.4剩余航道宽度
船体各特征点(在实际计算时已包括耙头外伸的横向距离,取6 m)的航行轨迹中最左侧曲线与基准线(行驶方向的左侧航道底边线)之间的距离(见图11)即为耙吸装驳船组作业期间左侧可供他船会遇或追越的剩余航道宽度。根据船体几何中心点距基准线最小横距在合理范围内的变化值,可计算船体在航行中的横向漂移距离。
4.3.5瞬时航速
根据实时记录的动态船位变化和相应的时间,可计算出作业期间耙吸装驳船组的瞬时航速见图12。
4.4 航行数据分析结果
对表3中大潮、中潮和小潮的各次试验进行分析,并对结果进行归纳总结,见表4。
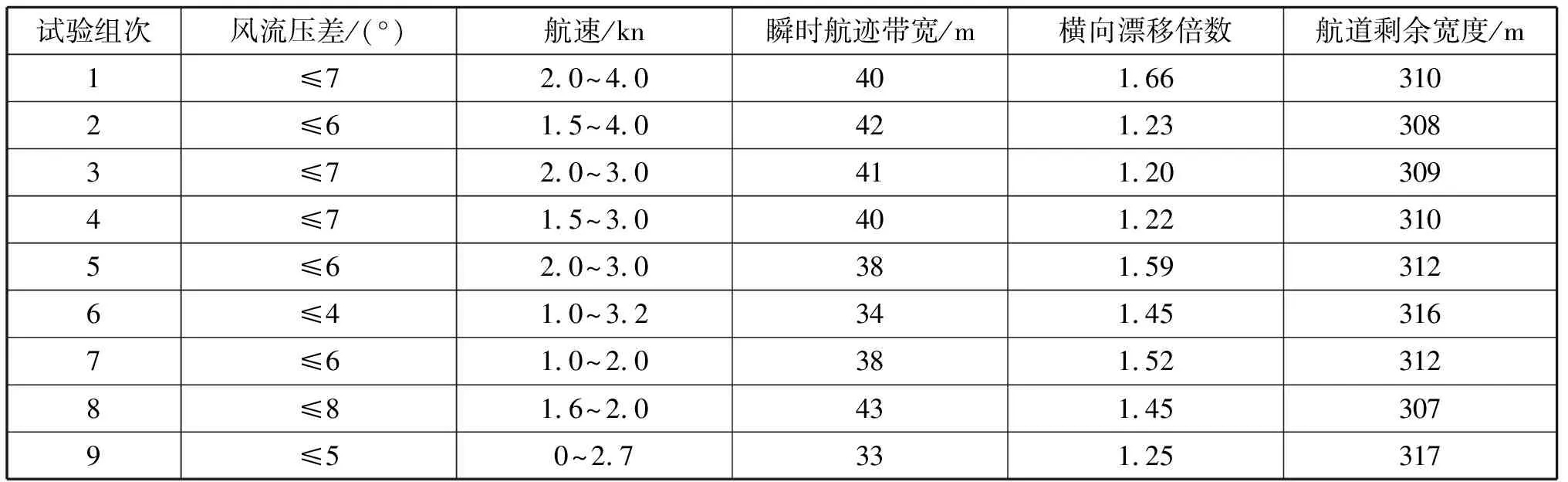
表4 实船试验数据分析结果
5 结束语
综合目前耙吸装驳试验和实船航行数据采集分析的具体情况,可得出以下分析结论:
1) 目前,长江口深水航道耙吸装驳实船试验主要在北槽上段和下段航道边坡及航道内侧1/4宽度的水域范围内进行。耙吸装驳船组航迹带左侧的剩余航道宽度由船组在航道截面上的作业位置决定。试验记录的9次作业过程,耙吸船左侧供他船会遇和追越的剩余航道宽度在300 m以上,对通航船舶的航行基本不构成影响。
2) 风流压偏角和航迹带宽度与航速负相关,与避让浮筒和进出航道等操纵意图有关,记录的全程横向漂流距离与操纵意图有关。
3) 剔除避让浮筒、进出航道等机动操纵航段,耙吸装驳船组在槽内作业期间,风流压偏角不超过5°~7°。
4) 剔除避让浮筒、进出航道等机动操纵航段,在槽内作业期间,耙吸船(不包括艕靠的泥驳)最大瞬间航迹带宽度不超过45 m。
5) 剔除避让浮筒、进出航道等机动操纵航段,耙吸船在槽内作业期间,最大横向漂移倍数不超过1.66。
6) 耙吸式疏浚船和泥驳吃水较浅,作业水域包括航道边坡,航行轨迹不受航道边线的限制,用航迹带宽度评估耙吸装驳船组对航道宽度资源的占用是不合适的。
