关于航海实习海图作业训练转向问题的思考
2020-12-08伍永军


摘 要:海图作业是航海部门长岗位履职的首要工作,也是直接影响舰艇航行安全的核心项目。舰艇转向是海图作业训练的重难点问题,为了提高训练效益,规范航迹标绘和航海日志填写方法,分别按实测舰位转向、按推算舰位转向、按半实测半推算舰位转向等三种情况进行了分析和探讨。
关键词:海图作业;航海实习;舰艇转向
中图分类号:U698 文献标识码:A 文章编号:1006—7973(2020)10-0042-02
为了在航行中掌握舰艇位置和进行航迹推算,分析舰艇是否处于安全状态,准确执行航海计划,保证航海安全,航行后总结航海经验,发生海事后判断责任,航海人员必须进行海图作业。海图作业是航海部门长岗位履职的首要工作,也是直接影响舰艇航行安全的核心项目。航海技术专业学员航海实习时,海图作业训练往往是主要的训练课目之一。海图作业训练主要包括海图航迹标绘和航海日志填写两个方面。而海图作业训练中舰艇转向问题,既是重点问题,也是难点问题。为了提高海图作业训练的效率,规范海图作业航迹标绘和航海日志填写方法,下面仅就航海实习海图作业训练中舰艇转向问题谈谈自己的看法。
航海实习海图作业训练过程中,舰艇转向的方式无非可分为三种:按实测舰位转向、按推算舰位转向、按半实测半推算舰位转向。
1 按实测舰位转向
所谓“实测舰位”,就是航海人员通过操作使用航海仪器实际观测获取相关数据确定的舰艇位置,主要方法包括电子定位(如雷达定位和卫星导航仪定位)、陆标定位(如两标方位定位、三标方位定位、三标两角定位、单标方位垂直角定位等)和天文定位(如观测太阳或恒星等天体的高度角来定位)。
在航海实习海图作业训练过程中,进入计划航线的起始点就是按实测舰位转向的,如图1所示。舰艇在航行值更人员的导航下按计划转入航线,转向稳定后立即通知正在进行海图作业训练学员转向的时间(比如转向时间为0800),要求在后续短时间内,一般是5-10分钟之内,自行实测一个舰位,以实测舰位点(假設为陆标定位)作为转入计划航线的起始点,以实测舰位的时间作为转向时间(假设为0805)。
这里最容易犯的错误有两点:一是没有按要求进行实测舰位,直接把计划航线转向点作为海图航迹标绘的起点,显然是大错特错了;二是虽然有实测舰位,但是标绘的转向时间不是自行实测舰位的时间(如0805),而是直接用航行值更人员通知的转向时间(如0800),显然与实际情况是不相符合的。因为舰艇在转向稳定后才通知进行海图作业训练的学员进行实测舰位,因此,学员实测舰位的时间是不能和航行值更人员通知的转向时间保持一致的,或者说不可能刚好在舰艇转向时进行实测舰位的,也完全没有必要这么做,只要按照要求在后续5~10分钟之内自行实测一个舰位进行转向航迹标绘即可。
按实测舰位转向这种方式也常见于舰艇因规避船舶、战术机动等特殊情况实施机动后恢复原航向时,海图作业的方法与上述是相似的,不同的是这种情况下一般由航行值更人员统一通知直接给定一个实测舰位及实测时间,参与海图作业训练的学员只需要按给定的数据进行航迹标绘即可。
2 按推算舰位转向
所谓“推算舰位”,就是不需要实际去操作使用航海仪器进行观测,而是直接根据航速和航行时间进行推算得出的舰艇位置。如果不计风流航行,则根据主机航速和航行时间进行推算;如果计风流航行,则要根据风流中的实际航速和航行时间进行推算。
按推算舰位转向这种方式主要分为三种情况:一是舰艇在计划航线的末段,在到达最后一个计划航线转向点之前就提前开始实施机动,准备转入停泊(抛锚或系浮筒或靠码头)状态,如图2所示;二是驶向下一计划航线或是其反向延长线上,如图3所示;三是修正航线,比如直接改变计划航线驶向下一个预定转向点,如图4所示。
第一种情况,要根据航行值更人员通知的预定按推算舰位转向时间,进行航迹推算,确定推算舰位,注意在海图上标注上推算舰位符号和转向时间。在航海日志填写中,日志右页不能简单地填写“按推算舰位转向”这几个字,而是要在海图上实际量取推算舰位点的经纬度,填入日志。并注意使用推算经纬度的符号φC、λC,而不是实测经纬度符号φO、λO。
第二种情况,多见于舰艇偏离计划航线,而离下一转向点之间有障碍物,继续按原航向航行又没有危险时,可按原航向继续航行。如图3,将当前航迹的延长线与下一计划航线的交点当作新的下一转向点,量取新转向点的转向方位和转向距离,当舰艇到达新转向点时即转入下一计划航线。
第三种情况,多见于舰艇由于避碰等原因偏离计划航线幅度较大,实测舰位与下一转向点之间为可航水域,可改变当前航向直接驶向下一转向点。在航海日志填写时,日志左页要填写修正过程中的航向、航速等数据(按栏填写);右页填写“修正到下一转向点”,也可以不填写,因为日志左页填写的数据已经能够体现出舰艇改变航向进行修正。
3 按半实测半推算舰位转向
所谓“半实测半推算舰位”就是确定舰位的数据一半是实测的,一半是推算的。当然,严格意义上讲,半实测半推算舰位实质上就是一个推算舰位,这里为了与上述“推算舰位”区分开来,特称之为“半实测半推算舰位”。
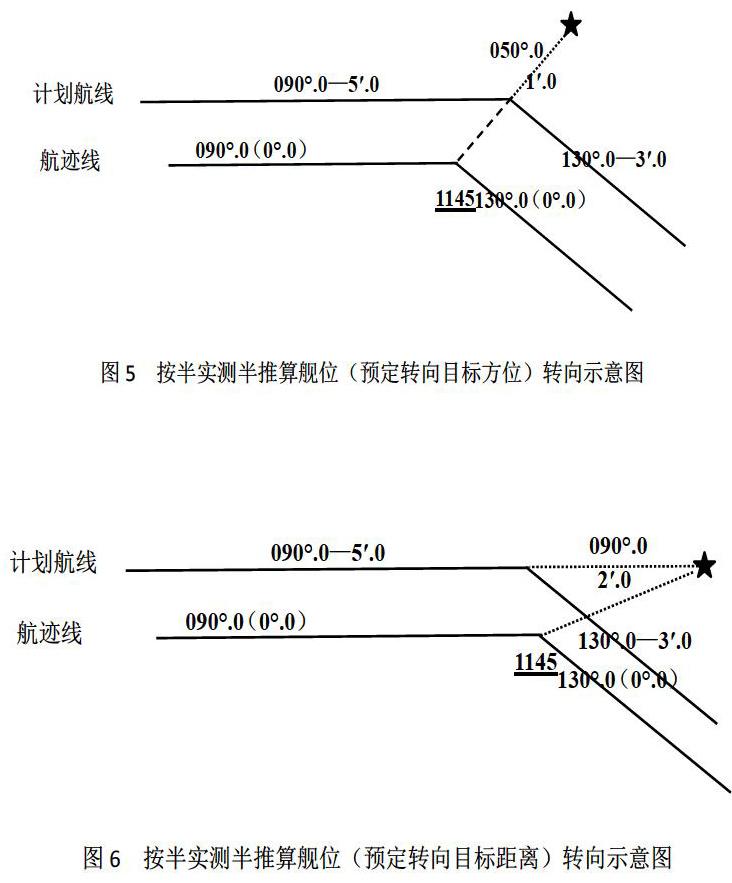
按半实测半推算舰位转向分为两种情况:一是按预定转向目标方位转向,如图5所示;二是按预定转向目标距离转向,如图6所示。在转向实施过程中,前者预定转向目标的方位是实测的,距离是推算的;后者预定转向目标的距离是实测的,方位是推算的,因此称为“按按半实测半推算舰位转向”。
按预定转向目标方位转向时,海图航迹标绘就是取预定转向目标的方位线或其延长线与航迹的交点作为转向点,注意标注推算舰位符号和转向时间。航海日志填写时,日志右页转向目标的方位要换算成罗方位或陀罗方位,转向目标的距离是直接从海图上量取的推算转向点与转向目标之间的距离,并用推算距离的符号DC来表示。
按预定转向目标距离转向时,海图航迹标绘就是取以预定转向目标为圆心,预定转向目标距离为半径的圆弧与航迹的交点作为转向点,注意标注推算舰位符号和转向时间。航海日志填写时,日志右页转向目标的距离为实测距离,用雷达距离的符号Dr来表示,而转向目标的方位是直接从海图上量取的推算转向点到转向目标之间的方位,用推算方位的符号BC来表示,注意这里推算方位是不用再换算成罗方位或陀罗方位的,而是直接填写实际量取的真方位。
参考文献:
[1]叶军,伍永军,回亚立,李佑华.航海专业训练[M].宁波:武警海警学院,2017.
[2]李永进.航海学[M].宁波:武警海警学院,2019.
[3]叶军.航海学实作指导书[M].宁波:武警海警学院,2017.
