三维激光扫描技术应用于城市建筑物外立面测绘
——以云南省澄江县提质扩容建筑外立面改造项目为例
2020-12-08金新平
金新平
(华东勘测设计院(福建)有限公司 福建福州 350003)
0 引言
为了进一步提升云南省澄江县城市发展空间和完善城市功能,塑造全域旅游城市形象,把澄江县建成云南最美县城和云南的“会客厅”,玉溪市住房和城乡建设局拟通过“城市修复、生态修复”的方式,实施老城区更新改造、城市修复、重点村改造提升、增绿填色等项目改善城乡人居环境。澄江县提质扩容建筑外立面改造项目为上述工程的一部分,涉及矣旧村外立面112 780m2,小湾村外立面64 300m2,小凹村外立面25 600m2,马房村、吉里村外立面78 792m2以及振兴路外立面改造工程14 525m2。现阶段立面图一般采用传统测量方式。常用外立面测量技术有以下3种:①人工测量。利用脚手架和测量工具由人工测量;②摄影测量。运用正直摄影获取建筑物外立面影像,经内业处理,获取建筑立面特征点坐标;③全站仪测量。使用全站仪测量建筑物外立面上特征点的三维坐标,通过计算机软件处理得到建筑外立面上点的坐标,通过特征点进行外立面绘制工作[1]。但这些测量方式都有各自缺点,比如效率较低、不能较好地表达复杂外立面,操作复杂,后期处理很难处理复杂建筑等;而三维激光扫描技术可以较好地满足这些要求。
1 激光扫描仪介绍
三维激光扫描仪技术,利用激光测距原理,通过记录被测物体表面大量密集点的三维坐标、反射率和纹理等信息,快速复建出被测目标的三维模型及线、面、体等各种图件数据。在城市建筑物外立面测绘领域实现对建筑物无接触快速扫描,并同时将获得的点云信息快速转换成计算机可以处理的立面图绘制数据。因此,具有以下优势:①扫描速度快,一般分辨率单站测量时间仅需几分钟;②扫描精度高,在合适范围内可达到±2mm;③采样率高,对复杂建筑外立面有较好的表现能力。总之,三维激光扫描技术凭借每秒将近100万点的扫描速度,可以轻松完成对复杂建筑的精确测量。同时,三维激光扫描仪是自身发射激光,而不依赖外部光源,所以在夜晚、地下溶洞等极端条件下依然可以工作。三维激光扫描仪的测量数据可以一次测量多次使用,通过对原始数据进行不同方式的后期处理,能够根据客户需求生成各种模式的数据,满足用户对同一区域的不同需求[2]。
2 技术路线
采用激光三维扫描仪进行立面绘制的整体思路,利用三维激光扫描仪进行数据采集工作,通过后期内业数据处理,选取立面绘制所需的数据资料进行立面绘制工作。具体作业流程如图1所示。
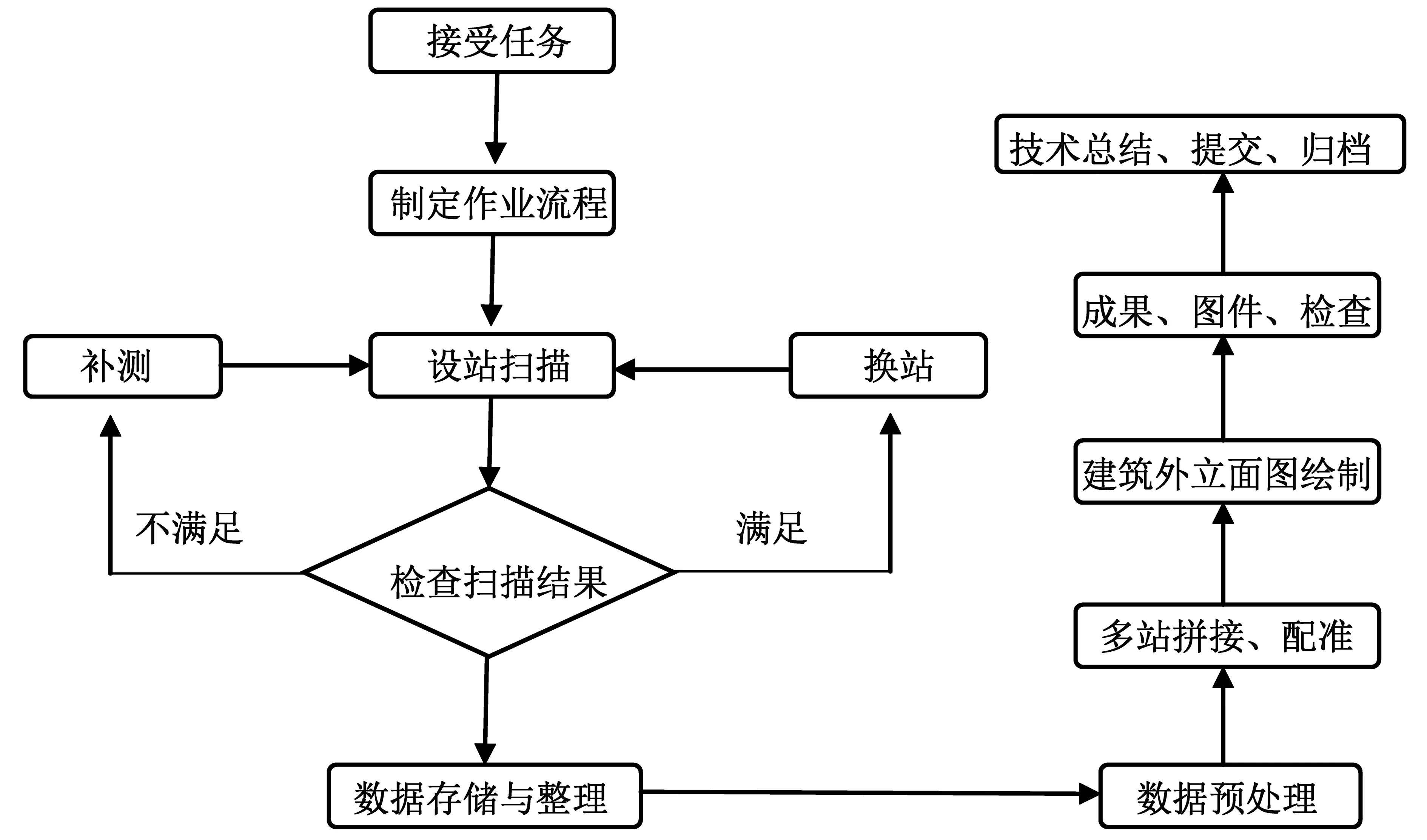
图1 立面成图流程图
3 原始数据采集
数据采集工作阶段,主要利用激光扫描仪对建筑物外立面进行系统、完整的数据收集。步骤包括:
(1)查看作业区域平面图初步制定作业流程;现场勘验,对作业流程进行合理修改,根据目标建筑物被遮挡情况,选择扫描路线和扫描方案。
(2)布置扫描点,将仪器正确架设至三脚架上,调整扫描仪至水平;扫描前后检查仪器与三脚架连接处是否松动,然后开始扫描作业。
(3)每次扫描完成后,利用扫描仪屏幕检查扫描结果,以确保数据完整性;若有物体经过造成大范围遮挡,可重新对此站扫描。扫描仪距离与被测物体应大于1m,同时注意尽量避开遮挡物对扫描影响,必要时可对被遮挡严重的建筑物单独扫描。
(4)测站之间,可以合理布置靶标球(至少3个且不在同一直线上),用于后期处理的站间精确拼接。
(5)及时记录各扫描站点之间的相对位置关系,以便后期数据整理和处理有序进行。
4 数据处理
4.1 原始数据预处理
原始数据处理,主要对各站的扫描数据进行检视,检查数据有效性,保证后期数据处理不出现错误。将原始扫描数据载入对应软件,分别查看各站点云数据以及图像数据,然后根据作业记录的资料选取所需站点,剔除错误的和不需要的数据,同时检查是否有大量遮挡情况,若有则进行现场补测。
如果扫描时使用了靶标球,则在每一站数据中利用相关算法识别出靶标球,并进行标记,以便下一步的多站拼接工作开展。图2是拼接前的点云数据,由图2可以清晰看到站与站之间是分离的。

图2 拼接前点云数据(吉里村部分)
4.2 扫描数据的多站拼接
点云的多站拼接是点云配准工作,是从扫描坐标系到控制坐标系的转换工作,其拼接方法常用的有3种:①基于目标的多站拼接;②基于俯视图的多站拼接;③基于云迹的多站拼接。
(1)如果扫描时使用了专用靶标球,则可以利用基于目标的多站拼接模式进行拼接工作。基于靶标球的多站拼接是通过算法识别出来的已知形状(靶标球),通过最佳拟合人工标志,获得人工标志中心的高精度坐标,计算两站之间的坐标转换矩阵并统一两站坐标,对所有测站进行坐标转换工作,最终将所有测站统一到一个坐标系下。
(2)基于俯视图的拼接模式,则根据测站数据二维俯视图之间的相关性进行多站拼接工作。因为基于俯视图的精度相比基于目标或基于云迹精度相对较低,所以,一般将基于俯视图拼接作为初步拼接结果,即粗拼结果。图3为基于云迹拼接的结果,由图2可清楚看到各站点云已经拼接到一起,表1是基于多站拼接数据的分析。

图3 粗拼后的点云数据

表1 基于俯视图的多站拼接数据分析
由表1可知,拼接点之间的平均值为10.2904mm,误差<4mm的点占22.3%。
(3)基于云迹的多站拼接法,则运用点云的ICP(Iterative CIosest Point,ICP)配准法,以点集对点集(PSTPS)配准方法为基础的一种曲面拟合算法。基于四元数的配准方法后,运用Faugera 和Hebert 提出的方法计算新的最近点点集,并进行迭代运算,直到残差平方和所构成的目标函数值不变[3]。这种拼接方式通过多次迭代运算,可以将精度在基于俯视图拼接精度的基础上进一步提高。表2是基于云积多站拼接的数据分析。
表2 基于云迹的多站拼接数据分析
由表2可知,拼接点之间的平均值为5.664mm,误差<4mm的点占41.6%。在此基础上,再进行一次基于云迹的拼接,得到的结果为拼接点之间的平均值是5.591mm,误差<4mm的点占41.7%,变化不大。
对比表1(基于俯视图的多站拼接数据分析)与表2(基于云迹的多站拼接数据分析)可知,基于云迹的多站拼接在精度上比基于俯视图的多站拼接提高了一倍左右,满足立面绘制要求。拼接完成之后,对整体点云进行最后的检查、命名和保存。
4.3 点云数据抽稀、切割
在选用一般分辨率情况时,扫描结果中每一站的点云数都超过600万,多站拼接之后的数据量很大,可以达到几GB甚至数十GB,这些都会导致软件处理速度过慢而影响工作效率,需要对拼接后数据进行一些处理。第一步处理,就是对数据进行抽稀。
常用的抽稀算法有两种:一种是根据曲率抽稀。这种方法可以根据点云的曲率选取合适的抽稀参数进行点云抽稀。该抽稀法可以更加高效地表现出高曲率处的点云,有效减少点云高曲率部分被过度抽稀导致边缘不清晰情况出现。另一种是基于八叉树的抽稀算法。这种算法可以人工调整参数,实现抽稀选择合适的距离间隔取点,适合平面较多的情况。结合点云情况选择合适的抽稀算法进行抽稀操作,使点云数据在不改变数据精度情况下压缩规模。
与此同时,由于点云数据中仍存在许多冗余数据,比如对后期数据处理会留下遮挡的高大植物、车辆、行人以及数据不完整的建筑物,而这些数据在立面绘制过程不会用到,且对下一步的立面绘制工作有障碍,所以需要将拼接后的点云数据中与立面绘制无关的数据切割并删除,然后整理、编号、妥善保存。
5 建筑外立面绘制
经过上述处理,点云数据现在只包括绘制所需要的外立面以及为了防止缺失保留的一部分建筑边缘,绘制建筑外立面工作即可依下面若干步骤开展。
(1)在俯视图视角观察建筑外立面点云,确定外立面正确方向,然后在立面中选择一个合适的高度作为标高(为了准确选择外立面参照平面,标高一般选取外立面水平长度最大处)。
(2)选中标高,调整标高的水平长度以覆盖外立面,并在俯视图中为立面画出与外立面平行的参照平面。然后,画出与参照平面平行的剖面线,拖动剖面框,直到包括整个建筑。
(3)拾取参照平面,选取上一步绘制的剖平面,选择正确的立面方向,从剖面视图(图4)观察点云,可以看到整体建筑外立面;但是,由于点云颜色单一,门窗、屋檐、阳台等主要构造边界模糊,难以区分。

图4 剖面视图(振兴路镇新华园部分)
(4)由于建筑外立面构造大多为门窗阳台,与墙面相互之间有垂直关系,所以可以利用法线对点云进行分类:点云中某一个点及周边点都可以形成一个平面,而且这个平面的法线可以利用算法得到。根据法线方向对这一点点及周边点进行赋色处理,最终可得到结果如图5所示,由图5中可以清晰地分辨不同结构之间的分界线。

图5 赋色后点云图(振兴路镇新花园部分)
(5)利用相关软件(如AutoCAD)对建筑的外立面,以及外立面的各种构造进行绘制。
(6)使用标注工具,对重要尺寸如门窗、台阶、阳台等进行标注。绘制完成之后,将外立面图与点云图对比,进行完整性及正确性检查[4]。最后整理、命名、妥善保存。图6为数据处理得到的最终成果图。

图6 外立面成果图(振兴路镇新花园环城北路侧)
6 结语
云南澄江县提质扩容建筑外立面改造项目,利用Faro focus 3d x120三维激光扫描仪,在30d内累计完成立面图3500幅,建筑面积约295 997m2,充分展示了激光扫描测绘作业的便捷性,数据种类获取的丰富性以及较高的工作效率,尤其对于作业情况复杂的区域具有人工测绘不可比拟的优势,在规划、考古、测绘等很多行业都表现出广阔的应用前景[5]。但是,目前仍存在不足之处,比如数据采集方式有待进一步简化(比如背包式、车载式),作业效率有待进一步提高,尤其是数据的后处理自动化程度偏低,虽然相比人工测量已经有了很大的效率提升,但时间以及人力成本仍然是一个较大的问题,亟待解决。所以,数据后处理软件的开发需求十分迫切,是以后的研究方向。
