基于改进复制动态演化博弈模型的行人与机动车冲突
2020-12-04王凤兰吕良东
刘 荣,王凤兰,吕良东
(空军工程大学基础部,西安 710051)
随着道路上机动车流量的不断增加,过街行人与机动车的冲突越来越多,人车事故也在不断增多。虽然交通安全法规定,机动车遇行人通过人行横道,应当停车让行,机动车经没有交通信号道路时,遇行人需避让。但是实际调查发现,行人与机动车总是相互穿越通过冲突区域[1]。目前博弈论在各个领域的研究越来越广泛[2-5]。1952年,Wardrop[6]首次将博弈理论引入交通领域中,由于传统博弈论遵循参与方完全理性的假设,与实际问题的有限理性条件不符。演化博弈[7-9]以有限理性参与方作为理论分析的基础,刻画博弈双方不断改进行为策略的缓慢调整问题,其符合人车冲突动态演化的现实。文献[10]建立了能够刻画信号交叉口交通参与者穿越行为的长期演化模型,通过调控决策参数优化人车行为的演化路径,诱导人车相互礼让,提高过街效率,但是博弈模型较简单。文献[1]针对现实中人车双方的有限理性条件和冲突的动态变化特征,建立了演化博弈模型,研究了不同情形下均衡点的位置以及稳定性,并深入分析了博弈系统演化机理;文献[11]针对网络攻防演化博弈模型,对传统演化复制动态方程进行改进,提高了模型的有效性和准确性。因此根据人车双方冲突的实际背景,利用文献[11]的方法,在人车冲突演化博弈模型的基础上,通过设置策略影响因子,给出策略之间的激励系数,对传统的演化复制动态方程进行改进,然后利用改进复制动态方程进行均衡求解。为现实社会中过街行人与机动车冲突的安全问题提供了理论参考和依据。
1 行人与机动车冲突演化博弈模型
定义1行人与机动车冲突演化博弈模型PVEGM(pedestrian-vehicle evolutionary game model)可以表示为4元组,PVEGM=(N,S,p,U)。
(1)N=(NP,NV),其中NP为过街行人,NV为机动车(驾驶员),N为参与主体空间。
(2)S=(SP,SV),其中SP为行人策略集合,SV为机动车策略集合,S为参与主体策略空间。
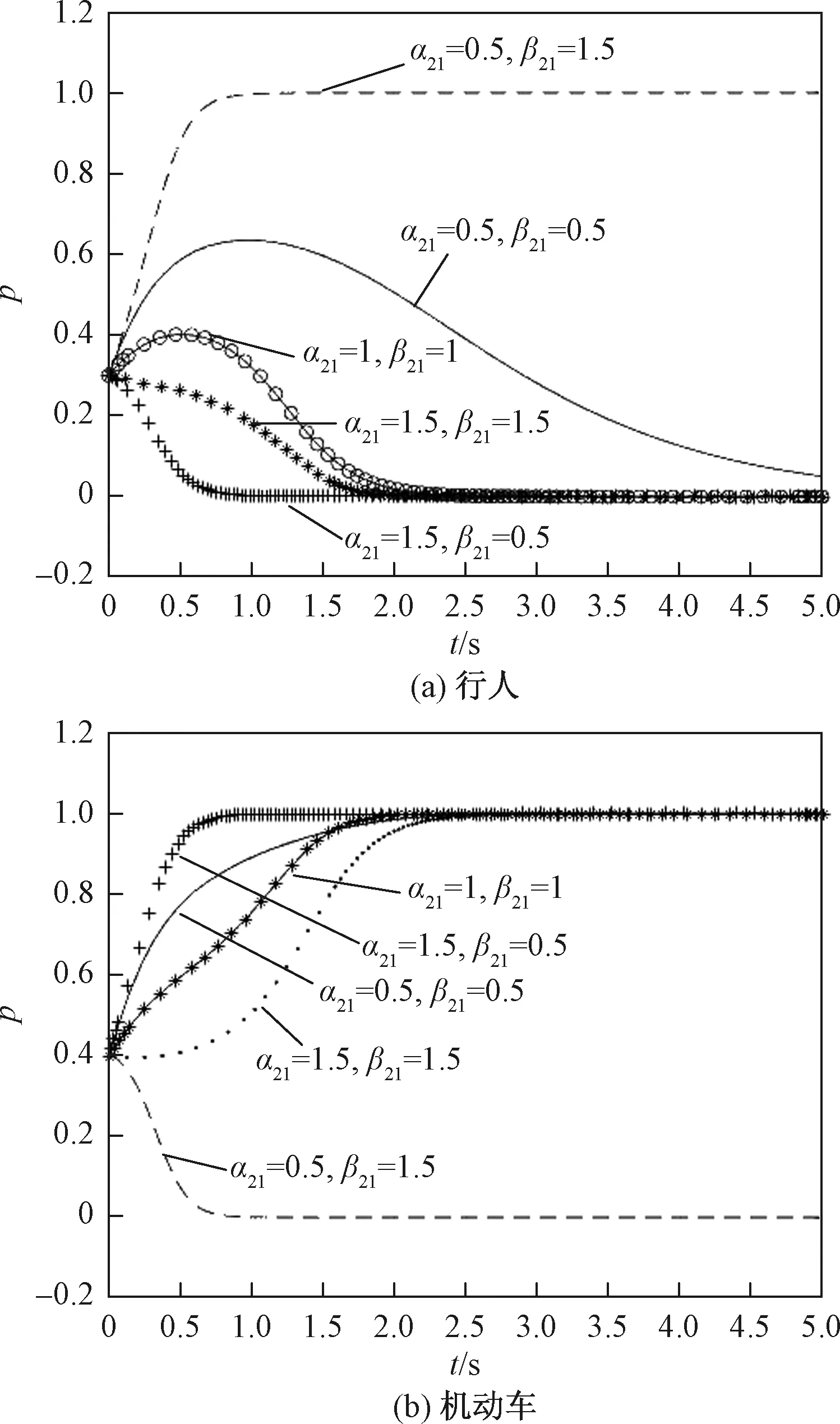
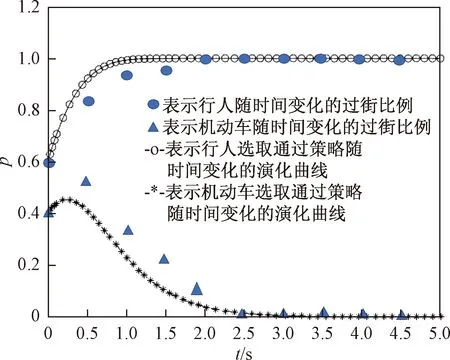
(3)p=(x,y),其中x为行人选取通过策略的概率集,y为机动车选取通过策略的概率集,p为混合策略集合,0 (4)U=(a,b)为收益函数集合,表示参与者的博弈收益,其中a为行人收益,b为机动车收益。 根据行人与机动车冲突的实际背景,假设人车双方的可选策略集分别为SP={通过策略P1,不通过策略P2},SV={通过策略V1,不通过策略V2}。 对应的人车冲突博弈树如图1所示。图1中,aij、bij分别为行人的收益和机动车的收益。 图1 行人与机动车冲突博弈树Fig.1 Tree of pedestrian-vehicle conflict game 根据行人与机动车冲突的实际背景,该博弈的收益矩阵如表1所示。 表1中,P、V分别表示行人和机动车过街时无冲突所带给行人和机动车本身的固定收益;C、D分别表示行人和机动车都选择通过策略时,行人和机动车的冲突收益,即固定收益减去冲突损失,注意这里冲突损失所指不一定为发生事故对彼此造成的损失;W表示机动车选择通过策略(V1),行人选择不通过策略(P2) 时,行人的等待收益,即固定收益减去等待损失;M表示行人选择通过策略(P1),机动车选择不通过策略(V2) 时,机动车的等待收益,即固定收益减去等待损失;B、E分别表示行人和机动车都选择不通过策略时,行人与机动车带给各自的互让收益,即固定收益减去其互让损失。 表1 人车冲突博弈收益矩阵Table 1 Income matrix of pedestrian-vehicle conflict game 根据表1,分别计算人车双方不同策略的期望收益函数UP1、UP2和UV1、UV2以及平均收益函数UP、UV。 (1) 基于上述建立的人车演化博弈模型,对于过街行人的选择策略,假设t时刻行人选择策略Pi的人数为pi(t),所占参与过街总人数的比例为xi(t),选取策略的期望收益为UPi(t),在t时刻平均收益为UP(t)。由此可知: (2) 随着过街行人与机动车的流动时间的延续,行人采取策略Pi的比例发生变化,其采取策略的动态变化速率pi(t)与选择策略Pi的人数成正比,又与策略Pi的期望收益成正比,即 p′i(t)=λipi(t)UPi(t) (3) 式(3)中:λi(λi>0)为策略影响因子,表示行人选取策略Pi的影响力,不同策略的影响因子不同。在实际过街行人与机动车的流动过程中,不同策略之间有一定影响关系,扩散速度较快的优势策略具有的影响力更强。λi越大表示行人策略Pi对其他策略的影响力越强;反之越弱。 对式(2)进行求导,可得行人选取策略的复制动态: (4) 对于机动车的选择策略,假设t时刻机动车选择策略Vi的人数为qi(t),所占参与过街机动车群体个数的比例为yi(t),选取策略的期望收益为UVi(t),在t时刻平均收益为UV(t)。由此可知: (5) 随着过街行人与机动车的流动,机动车采取策略Vi的比例发生变化,其采取策略的动态变化速率与策略Vi的个数成正比,又与策略Vi的期望收益成正比,即 q′i(t)=γiqi(t)UVi(t) (6) 式(6)中:γi(γi>0)为策略影响因子,表示机动车选取策略Vi的影响力。γi越大,表示机动车选取策略Vi对其他策略的影响力越强;反之越弱。 (7) 由此可得改进后的复制动态微分方程为 (8) 当λj=λi=1,γj=γi=1(i=1,2;j=1,2)时,即可得到Taylor等[12]最早提出的复制动态方程: (9) (10) 根据上述条件,可得 (11) 由x1(t)+x2(t)=1,y1(t)+y2(t)=1,可得x′1(t)=-x′2(t),y′1(t)=-y′2(t)。 因此,只需考虑x1(t)和y1(t)的演化状态,便可得到整个演化博弈系统的策略选取情况。 结合式(10)可知,行人选择通过策略和机动车选择通过策略的复制动态方程为 (12) (13) 式(13)中:E1、E2、E3、E4为鞍点;E5为中心点,说明该在整个演化过程中双方收益以及激励系数对整个博弈系统的稳定性会产生很大影响。 为了降低行人选择通过策略的概率,应该增加激励系数α21的值,即提高不通过策略对通过策略的抑制作用,而为了提高机动车选择通过策略的概率,应当减小激励系数β21的值,即降低不通过策略对通过策略具的促进作用,从而加快演化收敛的速度,说明模型具有一定的合理性。 通过对本文方法和其他文献进行比较可知,目前关于人车冲突的问题,文献[13]对过街人车冲突的等级进行了划分以及影响进行了分析,文献[14]建立了人行冲突概率估计模型,进而分析了冲突概率的变化特征;文献[1]与本文方法均是演化博弈模型,其行为理性都是不完全理性,主要针对双方的最优策略考虑,比较结果如表2所示。虽然文献[1]的模型采用复制动态方程,但是并未考虑同类策略间的影响,导致分析策略稳定性的效率不高。本文方法改进了传统的复制动态方程,引入了激励系数,提高了策略稳定性的效率,便于观察均衡解的变化方向,所以方法对于人车冲突问题的针对性更强,为现实社会中的冲突安全问题具有更好的指导意义。 表2 各方法结论比较Table 2 Comparison of the conclusions of each method 通过对激励系数的不同设置值进行演化博弈系统试验仿真,激励系数的不同,得到策略之间的影响度的不同,从而验证不同激励系数在其演化过程中起的作用,突出改进复制动态演化博弈模型的优越性。 实验环境为MATLAB R2016a,实验中分别设定P=V=10,C=D=2,M=6,W=8,V=10,B=E=4,λ1=1,γ1=1。基于激励系数α21、β21取不同值,对于初始状态(x1,y1)=(0.3,0.4)的状态演化趋势进行试验仿真,得到不同的演化趋势如图2所示。图2(a)表示行人选择通过策略随博弈时间变化的演化图,图2(b)表示机动车选择通过策略随博弈时间变化的演化图。基于演化趋势图,对激励系数的不同设置值进行分析演化博弈稳定解。 图2 选择通过策略随博弈时间变化的演化图Fig.2 Evolution chart of selection strategy with game time (1)当α21=1,β21=1时表示行人与机动车双方各自的两个策略之间均不存在依赖关系,这种状态与传统复制动态是一致的,即为传统的演化动态情形。 (2)当α21=0.5,β21=0.5时表示行人与机动车的不通过策略对通过策略均具有促进作用。显然与情形(1) (即传统演化动态情形)对比,由于行人与机动车不通过策略对通过策略均具有促进作用,因此发现当0 (3)当α21=0.5,β21=1.5时表示行人策略PS2对策略PS1具有促进作用,机动车策略VS2对策略VS1具有抑制作用。与情形(1)对比,由于行人选择不通过策略PS2对通过策略PS1具有促进作用,从而行人会更快速的选择通过;机动车选择不通过策略VS2对通过策略VS1具有抑制作用,机动车快速选择不通过,加快了博弈收敛的速度。 (4)当α21=1.5,β21=0.5时表示行人策略PS2对策略PS1具有抑制作用,机动车策略VS2对策略VS1具有促进作用。与情形(1)对比,由于行人策略PS2对策略PS1具有抑制作用,机动车策略VS2对策略VS1具有促进作用,从而行人会选择不通过,机动车更快速选择通过策略,加快了博弈收敛的速度。 (5)当α21=1.5,β21=1.5时表示行人和机动车的不通过策略对通过策略均具有抑制作用。通过与情形(1)对比分析,虽然行人与机动车不通过策略对通过策略均具有抑制作用,但是可以发现行人选择通过策略的概率逐渐下降,在t=2 s时稳定在不通过策略。而机动车则以缓慢的速度选择通过,即选择通过的概率在缓慢上升,这是由于在初始状态时,机动车选择通过的概率0.4大于行人选择通过的概率0.3(也可以理解为机动车群体中选择通过策略的机动车数量比例大于行人群体中选择通过策略的行人数量比例)。当行人以更小的概率选择不通过时,即更多的人选择等待,且在t=2 s时已经达到稳定状态,因此机动车会以缓慢的速度选择通过策略,并且在t>2 s以后逐渐达到稳定,双方达到稳定状态的速度比传统演化速度慢,这是由于策略之间的互相作用引起,符合实际情况。 通过对以上仿真结果的详细分析与对比,改进复制动态中激励系数不相同,对博弈演化的收敛速度的影响不同。由此可知,所建模型中的理论分析与实验仿真结果一致,符合实际情况。对于人车冲突的安全问题具有理论指导作用,进一步提高人车过街的安全性。 通过随机选取西安市无信号控制路段对模型的可靠性进行验证。选取路段为西安市灞桥区浐河西路南段,此路段为南北方向,路段朝南50 m有一红绿灯交叉路口,路西有一公交站点,机动车希望赶在绿灯转换为红灯之前通过,行人希望赶在所需乘坐的公交车到达之前穿过街道到站点坐车,由于双方均受到交通吸引点的影响,所以双方的通过策略对不通过策略均有抑制作用。对此路段进行30 min的人车过街冲突数据记录,人车过街选取通过策略随时间变化的比例如图3表示,为验证模型的可靠性,将记录的数据代入到模型中,得到模型的演化曲线如图3所示,对比可以看出,实测数据变化趋势与模型的演化曲线基本一致,表明模型符合实际情况,是可靠有效的。 图3 人车选择通过策略随博弈时间变化的演化对比Fig.3 Comparison of the evolution of the strategy of pedestrian-vehicle selection with the game time 对于人车冲突安全问题中人车冲突行为的博弈现象,从演化博弈论的角度对人车冲突问题进行了分析,根据双方冲突的实际背景,通过设置策略影响因子,给出激励系数,改进了传统复制动态方程,进而对双方策略进行了稳定性分析。通过降低行人选择通过策略的概率,应该增加激励系数α21,即提高不通过策略对通过策略的抑制作用,而为了提高机动车选择通过策略的概率,应当减小激励系数β21,即降低不通过策略对通过策略具的促进作用,从而加快演化收敛的速度。因此,不仅提高行人与机动车过街的效率,而且对人车过街的安全性进一步提高。在下一步的研究中将考虑如何在人车冲突问题中调整收益函数,进而有效控制人车安全问题。

2 改进复制动态构造




3 人车冲突演化均衡求解


4 实验仿真分析
5 模型的可靠性验证
6 结论
