人工蜂群算法在飞机舵机电液伺服系统的应用
2020-12-04刘晓琳
刘晓琳,苏 杨
(中国民航大学电子信息与自动化学院,天津 300300)
飞机舵机电液伺服系统是模拟舵机真实运行过程中负载变化情况的地面仿真设备[1],能够在实验室条件下对舵机性能进行测试。相比传统的自破坏性实验,其成本低、实验周期短,被广泛应用于航空测试研发领域[2-3]。尽管该系统极大程度地改进了飞机舵机的测试方式,然而它具有非线性、时变性特点[4]。此外,实际工作过程中输出值与期望值之间会产生误差,该误差即为多余力[5]。多余力的存在对系统的稳定特性、加载精度、响应速度等重要性能指标都有严重影响。因此,如何结合系统结构特点,最大程度地抑制多余力干扰,改善系统控制性能,对飞机舵机电液伺服系统的研究具有十分重要的意义,也是中国飞行控制地面仿真领域讨论的热点问题之一。
已有研究成果将多余力抑制方法分为结构补偿方法和控制补偿方法两种[6]。其中,结构补偿方法是系统的结构和功能进行设计,从而达到抑制多余力的目的。控制补偿方法将多余力作为系统扰动,通过设计相应的控制器对多余力实现主动补偿[7]。该方法与结构补偿方法相比不仅成本低,而且能够适应不同型号舵机的测试需求,是多余力抑制手段的研究重点。在实际工业控制中,比例-积分-微分(proportion integration differentiation,PID)控制器以其算法简单、鲁棒性强且不依赖被控对象精确数学模型的优点,是目前应用最广泛的控制补偿方法[8]。但是由于常规PID控制器参数设计通常采用经验整点法,缺乏灵活性,所以无法在参数时变的非线性系统中获得良好的实时控制效果。近年来,随着群智能算法在非线性系统控制方面的不断发展[9-10],人工蜂群算法以其结构简单、控制参数少、精度高等优势[11]在复杂系统环境的实时控制领域逐步受到关注,为参数时变的非线性系统实施人工蜂群控制策略提供了可行性验证。但是由于目前采用人工蜂群算法对飞机舵机电液伺服系统的控制器进行设计尚处于起步阶段,尚未克服算法本身的多样性不足和开采能力较差[12]的缺点,从而导致算法易陷入局部最优和收敛速度慢。因此,迫切需要深入研究人工蜂群算法,以解决飞机舵机电液伺服系统所存在的多余力干扰关键技术问题。
鉴于此,在建立飞机舵机电液伺服系统数学模型的基础上,首先将云模型和变邻域搜索的思想引入传统人工蜂群算法之中,增强算法的开采能力。然后利用改进的人工蜂群算法对PID控制器参数进行整定,对复合控制进行设计。最后通过仿真实验验证所设计控制器性能的优劣。
1 飞机舵机电液伺服系统数学模型建立
为便于对飞机舵机电液伺服系统控制器的设计进行理论分析与验证,需要根据系统结构及工作原理,建立合理的数学模型。飞机舵机电液伺服系统为位置式力伺服系统,在实际工作过程中会受到油液质量、液压缸损耗等非线性因素的影响,且加载子系统和舵机子系统之间存在耦合,难以建立系统全部构件的精确数学模型。所以,在建模时进行了适当的简化处理,只建立加载子系统的数学模型,并结合飞机舵机电液伺服系统的技术指标,分析了阀控液压缸流量线性化处理的合理性,为系统加载精度、响应速度、跟踪效果及稳定性等性能的分析奠定了基础。
飞机舵机电液伺服系统由舵机子系统和加载子系统两部分组成,如图1所示。舵机子系统包括飞机舵机和光栅尺两部分。加载子系统包括控制器和执行机构。其中,执行机构由力传感器、电液伺服阀、阀控液压缸和缓冲弹簧组成。

图1 飞机舵机电液伺服系统结构简图Fig.1 Structure sketch of electro-hydraulic servo system for aircraft rudder
系统工作原理描述如下。
(1)光栅尺测量飞机舵机主动运动所产生的位移信号。
(2)控制器将位移信号与加载梯度相乘得到指令力信号,并与缓冲弹簧输出的加载力信号比较得到系统误差。
(3)力传感器通过指令力与加载力相比较获得电压信号并传递给电液伺服阀。
(4)电液伺服阀将电压信号放大并转换为大功率液压能信号以驱动阀控液压缸运动,从而带动缓冲弹簧运动产生加载力信号,输出到舵机子系统。
1.1 阀控液压缸数学模型
阀控液压缸将大功率液压能信号转换为机械能信号,为飞机舵机电液伺服系统提供动力。
阀控液压缸的运动学方程为
(1)

阀控液压缸的压力动态方程为
(2)
阀控液压缸进油口流量q1和出油口流量q2分别为
(3)
(4)
式中:Cd为伺服阀节流孔流量系数;W为节流孔面积梯度;xv为阀芯位移;ρ为液压油密度;ps为额定工作压力(假设为恒定值);p1为进油口处实际工作压力;p2为出油口处实际工作压力。
则阀控液压缸负载流量方程可表示为
(5)
即
(6)
考虑到飞机舵机电液伺服系统在设计中通常令pL/ps<<1,则有
(7)
又考虑到系统中xv为-0.12~0.12 m,系统频带为10 Hz,则对阀控液压缸负载流量方程进行线性化处理具有较高的可信度。以阀控液压缸中位为零点,得阀控液压缸线性化负载流量方程为

Kg为飞机舵机电液伺服系统加载梯度图2 飞机舵机电液伺服系统数学模型结构方块图Fig.2 Mathematical model block diagram of electro-hydraulic servo system for aircraft rudder
qL=Kqxv-KcpL
(8)
且
(9)
(10)
式中:Kq为伺服阀流量增益;Kc为伺服阀流量-压力系数。这两个参数均为系统的非线性不确定性参数。
1.2 电液伺服阀数学模型
电液伺服阀是将电信号转换为液压能信号的装置。根据飞机舵机电液伺服系统加载频率特性,可将电液伺服阀传递函数作为一阶惯性环节处理为
(11)
1.3 缓冲弹簧数学模型
缓冲弹簧位于阀控液压缸与舵机子系统之间,起到缓冲加载力、滤除力高频分量的作用。将飞机舵机近似看作惯性负载,则舵机子系统的黏性阻尼系数可近似看作0。忽略缓冲弹簧自身质量和弹簧运动过程中摩擦等因素的影响,缓冲弹簧输出的加载力与舵机相对作动筒的位移成正比关系,即
FL=KL(xp-xs)
(12)
式(12)中:KL为弹簧刚度系数;xs为光栅尺所测量位移。
1.4 力传感器数学模型
力传感器是一种线性传感器,将力信号转换为电压信号。该电压信号与指令力和缓冲弹簧输出的加载力之差成正比关系,即
USV=KT(Fcmd-FL)
(13)
式(13)中:KT为力传感器及调理电路的放大倍数;Fcmd为指令力。
根据式(1)~式(13),可得飞机舵机电液伺服系统频域范围内数学模型结构方块图如图2所示。
同时可根据图2将缓冲弹簧的输出力表示为
(14)
且
(15)
式中:FL包含J1和J2两部分,J1为受电液伺服阀控制的加载力部分;J2为干扰部分;s为微分运算符。而在J2中,分析可知其中的加速度变化率项可以与FL中的分母部分相互抵消,即阀控液压缸的干扰实际上仅与执行机构轴运动的速度和加速度有关。
2 飞机舵机电液伺服系统控制器设计
飞机舵机电液伺服系统中的控制器能够起到补偿输出误差、抑制多余力的作用,在对其进行设计时,不仅要考虑对系统性能指标的影响,还要考虑其实现方式简单、适用性强。与传统控制方案相比,设计的控制器结合了改进人工蜂群算法和PID控制器的优点,提出以下两个特色与创新之处。
(1)针对传统人工蜂群算法多样性不足、开采能力较差而导致算法收敛速度慢、易陷入局部最优的问题,提出一种改进人工蜂群算法。一方面,采用具有稳定且随机特性的云模型[13]作为选择策略,解决算法在选择食物源过程中对种群多样性削弱的问题;另一方面,采用具有轨迹启发式特性的变邻域搜索[14]作为选择方式,能够避免算法在直接搜索全局最优解的过程中陷入局部最优,从而在保持传统人工蜂群算法较强勘探能力的基础上,又增强了算法的开采能力。
(2)采用改进人工蜂群算法对PID控制器参数进行在线自整定,实现对飞机舵机电液伺服系统的复合控制。先利用改进人工蜂群算法实时获取系统误差和适应度,寻找最优食物源作为PID控制器参数输出。再利用PID控制器根据系统误差和控制参数,输出控制指令给执行机构,从而使系统在达到控制指标要求的基础上,提升整体性能。该方法不依赖系统的精确数学模型,克服了传统控制方法的局限性。
2.1 人工蜂群算法的改进
人工蜂群算法是一种模拟自然界中蜜蜂搜索食物源过程的群智能算法,将蜂群分为雇佣蜂、观察蜂和侦查蜂[15]。将所有食物源的三维向量设置为飞机舵机电液伺服系统PID控制器参数kp、ki、kd。在每次迭代过程中,根据适应度对食物源的优劣进行比较,通过寻找更优食物源来优化PID控制器的参数,直至达到最大迭代次数为止。改进人工蜂群算法的流程如下。
2.1.1 初始化阶段
对最大邻域kmax、最大迭代次数N和种群规模SN进行赋值。根据式(16)随机产生具有SN个解的初始食物源,其中,SN和雇佣蜂的数量相等。每个食物源用Xi=(xi,1,xi,2,…,xi,D)来表示,其中i∈{1,2,…,SN},D为待优化问题的维度。
xi,j=xmin,j+rand[0,1](xmax,j-xmin,j)
(16)
式(16)中:xi,j为第i个食物源Xi的第j维度,j∈{1,2,…,D};rand[0,1]为[0,1]的随机数;xmax,j和xmin,j分别为第j维取值的上、下限。
2.1.2 雇佣蜂阶段
在初始化得到食物源Xi的基础上,雇佣蜂通过解搜索方程[式(17)]生成新食物源Vi=(vi,1,vi,2,…,vi,D)。
vi,j=xi,j+∅i,j(xi,j-xk,j)
(17)
式(17)中:vi,j为第i个新食物源Vi的第j维度;∅i,j为[-1,1]的随机数;k∈{1,2,…,SN}且k≠i。比较新食物源Vi和原食物源Xi的适应度,如果新食物源适应度更高,则替换原食物源;否则继续选择原食物源。
2.1.3 观察蜂阶段
根据雇佣蜂所选择的食物源位置和适应度信息,观察蜂对食物源进行进一步选择。考虑到算法的准确性和快速性取决于搜索过程中食物源的选择策略和选择方式,而传统人工蜂群算法采用轮盘赌策略和随机搜索方式,虽然保证了算法较快的收敛速度,但同时也导致算法易陷入局部最优。
为此,首先采用云模型作为算法的选择策略,其基本思想是:由于适应度高的食物源被选中的概率较大,但也可能较小;反之,适应度低的食物源被选中的概率较小,但也可能较大。所以利用云模型可以使食物源的选择在倾向于适应度高的食物源的同时,也兼顾适应度低的食物源,从而确保了种群的多样性。
云模型选择策略可以描述为:当种群规模为SN时,对于第i个食物源Xi,设其适应度为Fi,则该食物源被选中的概率Pi为
(18)
且
(19)
式(19)中:Ex为云模型期望;Enx为熵;Hx为超熵。Enx′为熵的一阶导数;G(Enx,Enx′)为正态随机数生成函数;Enx和Enx′分别为该组随机数的期望和标准差。
其次,采用变邻域搜索作为算法的选择方式,其基本思想是:由于不同邻域结构下局部最优解可能不同,所以利用变邻域搜索可以覆盖更多可能的邻域结构,更好地避免算法陷入局部最优,从而达到更快更准地获得最优食物源的目的,提升算法开采能力。
变邻域搜索方式的流程如下。
(1)设置一个初始可行解X0和一组邻域结构Nk(k=1,2,…,kmax)记录当前最优解为Xi←X0;k←1。
(2)当k=kmax时,停止搜索运算;否则,在食物源Xi的第k个邻域进行随机搜索,获得邻域内新食物源X′;对邻域内新食物源X′进行局部搜索,获得邻域内新食物源的局部最优解X″;如果F(X″)>F(Xi),则Xi←X″,k←1;否则,k←k+1;之后重复这一步骤。
2.1.4 侦查蜂阶段
当被选中的食物源Xi被开采完毕,即适应度未更新次数达到预先设定的极限时,此时需要放弃该食物源,并将处于该食物源的雇佣蜂变成侦查蜂,采用式(20)寻找下一个食物源Xi。
xi,j=xmin,j+rand[0,1](xmax,j-xmin,j)
(20)
记录当前最优食物源Xb,当改进人工蜂群算法达到最大迭代次数N时,停止运算并输出最终获得的最优食物源Xb;否则,再次进入雇佣蜂阶段进行计算。
改进的人工蜂群算法流程图如图3所示。
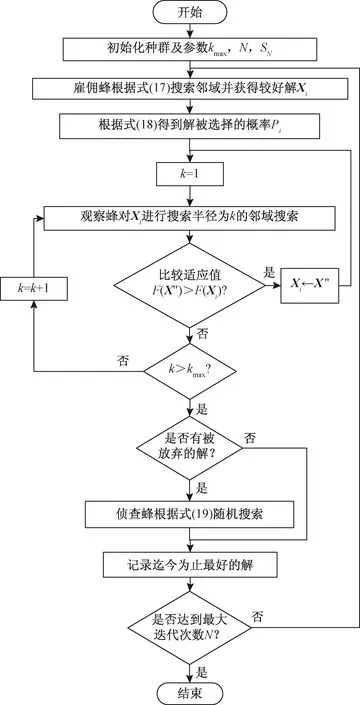
图3 改进人工蜂群算法流程图Fig.3 Improving the flow chart of artificial bee colony algorithm
2.2 复合控制器的设计
设计的复合控制器由改进人工蜂群算法模块和PID控制器模块两部分组成,其原理图如图4所示。该复合控制器利用改进人工蜂群算法模块对PID控制器模块的控制参数进行在线实时调整,充分结合了传统PID控制方式鲁棒性强和人工蜂群算法适用于非线性控制的特点,有利于提升飞机舵机电液伺服系统的整体控制性能。
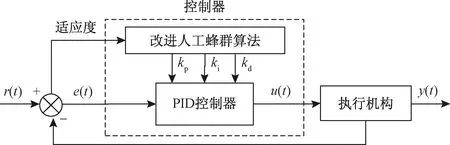
t为时间;r(t)为系统期望输出;y(t)为系统实际输出;u(t)为控制器指令信号图4 复合控制器原理图Fig.4 Compound controller principle diagram
根据飞机舵机电液伺服系统抑制多余力、改善系统性能的控制目标,采用能够反映系统调节品质的时间绝对误差(integrated time absolute error,ITAE)标准对适应度的计算法则进行设计。其中,改进人工蜂群算法的优化目标是寻找具有更高适应度的食物源,而PID控制器参数整定的目标是令系统误差尽可能小,因此设计适应度计算法则为
(21)
式(21)中:e(t)=r(t)-y(t),为实际输出和期望输出之间的系统误差;F(t)为适应度函数。
复合控制器的工作过程是:首先,确定PID控制器参数的取值范围,即确定算法搜索空间;然后,改进人工蜂群算法模块根据实时获取的适应度,通过3.1节所述算法流程优化PID控制器参数kp、ki、kd,从而获得PID控制器模块的输出u(t)为
(22)
最后,执行机构得到系统的实际输出。此时,如果改进人工蜂群算法已达到最大迭代次数N,即达到通过经验值设定的人工蜂群算法调用次数,则输出该组数据作为PID控制器的最优参数;否则,再次调用改进人工蜂群算法寻找最优食物源所对应的PID控制器参数。复合控制器工作流程如图5所示。
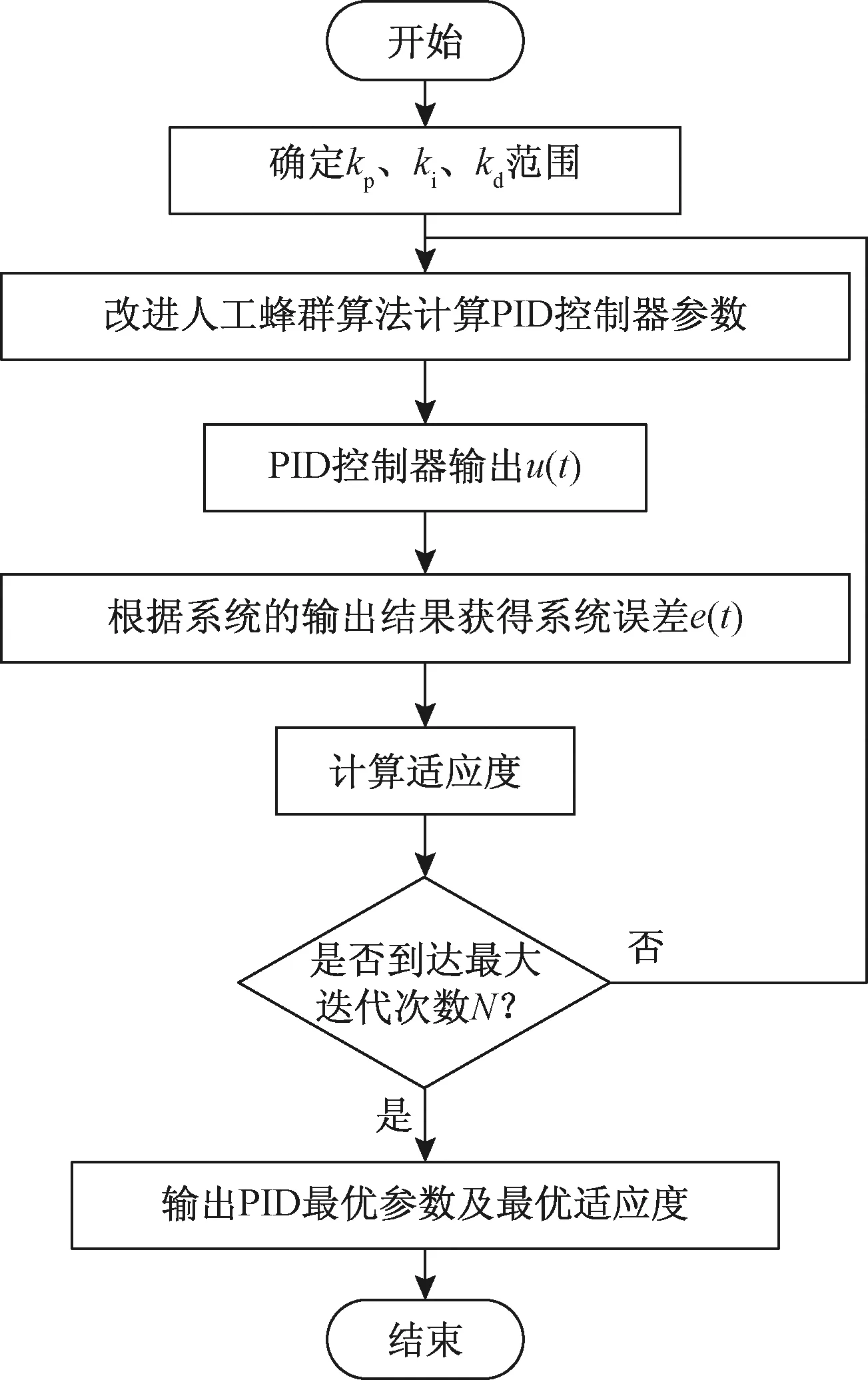
图5 复合控制器工作流程图Fig.5 Work flow chart of composite controller
3 仿真实验与结果分析
利用MATLAB对设计的复合控制器的控制性能进行仿真测试,进而比较改进人工蜂群算法PID控制器较传统人工蜂群算法PID控制器对系统各项性能指标的影响。系统仿真模型参数设定为:KSV=1.00×10-1m/V,Ts=1.90×10-3s,Kq=5.77 m2/s,Vt=3.60×10-3m3,Mt=2.00×102kg,Ap=1.20×10-2m2,Kc=1.13×10-11m3/(s·Pa),βξ=6.90×108N/m2,KL=3.00 T/mm。
3.1 系统加载精度及跟踪能力仿真结果及分析
为了比较人工蜂群算法改进前后对提高系统加载精度及跟踪能力的效果,根据飞机舵机工作的实际情况,设定仿真模型输入指令是幅值为6 mm,频率为10 Hz的正弦信号,当加载梯度为1 T/mm时,得到仿真实验结果如图6所示。
由图6分析可知,采用传统人工蜂群算法PID控制方式,系统幅度差约为3.54%,相位差约为-4.83°。在舵机启动阶段,其幅度差可达到37%,不能满足双五指标,即系统的幅度差和相位差的绝对值未能均在5%以内。采用改进人工蜂群算法PID控制方式,系统幅度差约为0.41%,相位差约为-0.56°,满足双五指标,且能够提高系统的加载精度。同时,通过对比指令力曲线和实际加载力仿真曲线可知,采用改进人工蜂群算法PID控制方式的系统具有更加良好的跟踪效果。

图6 加载精度仿真曲线Fig.6 Loading accuracy simulation curve
3.2 系统响应速度仿真结果及分析
为了比较人工蜂群算法改进前后系统在极端情况下的响应速度,设定仿真模型输入指令为单位阶跃函数,当加载梯度为1 T/mm时,得到仿真实验结果如图7所示。
由图7分析可知,采用传统人工蜂群算法PID控制方式,系统的上升时间tr=0.004 s,超调量σ=3.4%。采用改进人工蜂群算法PID控制方式,系统的上升时间tr=0.003 s,超调量σ=1.0%,即能够将飞机舵机电液伺服系统的多余力抑制在可接受范围内,并且具有更快的响应速度,能够满足系统要求。
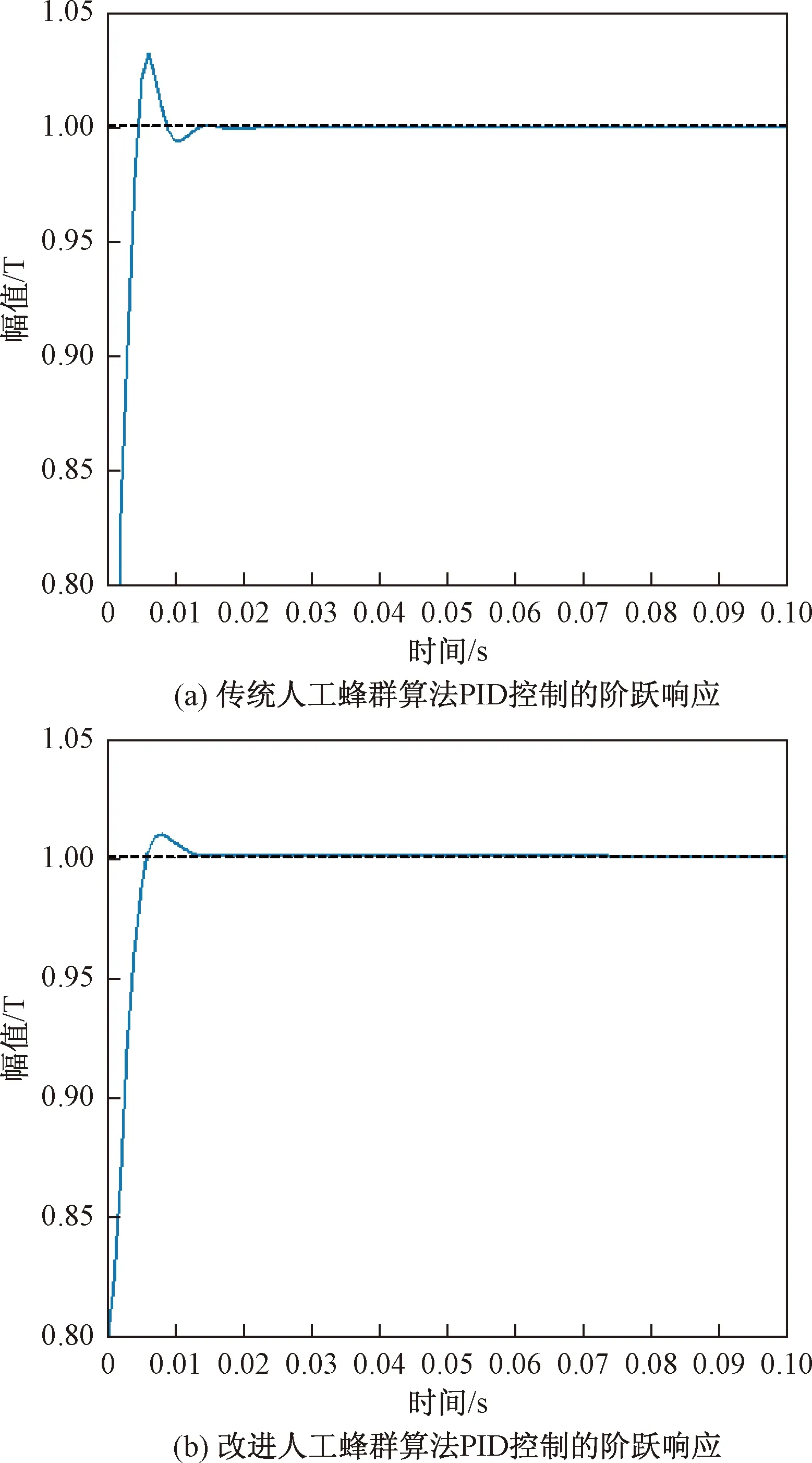
图7 阶跃响应仿真曲线Fig.7 Step response simulation curve
3.3 系统多余力抑制效果仿真结果及分析
为了比较人工蜂群算法改进前后系统多余力的抑制效果,将系统在两种控制方式下所产生的多余力进行比较,如图8所示。图8中,曲线1为采用传统人工蜂群算法PID控制方式系统产生的多余力,曲线2为采用改进人工蜂群算法PID控制方式系统产生的多余力。
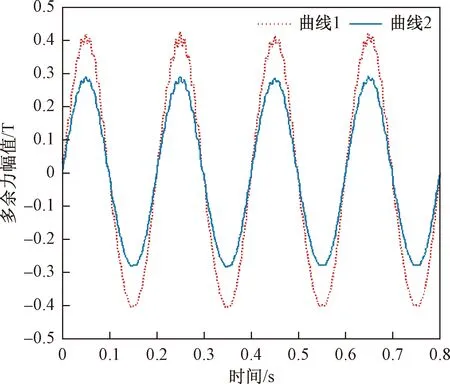
图8 多余力仿真曲线Fig.8 Redundant force simulation curve
由图8分析可知,相比采用传统人工蜂群算法PID控制方式,采用改进人工蜂群算法PID控制方式,可将多余力最大值由0.43 T降至0.29 T,减小了约32.56%,具有更好的多余力抑制效果。
3.4 系统抗干扰性仿真结果及分析
为了比较人工蜂群算法改进前后系统抗干扰性的效果,在仿真时间运行到0.04 s时加入一个幅值为1 mm,周期为0.1 s,占空比为5%,相位延迟为0.04 s的方波干扰信号,将系统在两种控制方式下的输出结果进行比较,如图9所示。图9中,曲线1为输入的指令力,曲线2为采用传统人工蜂群算法PID控制方式系统的输出结果,曲线3为采用改进人工蜂群算法PID控制方式系统的输出结果。

图9 抗干扰性仿真曲线Fig.9 Anti-jamming simulation curve
由图9分析可知,当系统出现干扰时,采用传统人工蜂群算法PID控制方式,系统输出出现较大的波动,调节时间为0.012 s。采用改进人工蜂群算法PID控制方式,系统输出波动较小,调节时间为0.006 s。结果表明,在系统出现干扰信号后,采用改进人工蜂群算法PID控制方式不仅能使系统的超调量降低,还能减少调节时间,满足系统对抗干扰性的要求。
4 结论
在分析飞机舵机电液伺服系统工作原理并构建其数学模型的基础上,通过云模型和变邻域搜索方式对传统人工蜂群算法观察蜂阶段的搜索策略和搜索方程进行改进,设计了结合改进人工蜂群算法和PID控制器的复合控制方法。仿真结果表明,采用该复合控制方法的飞机舵机电液伺服系统,相比采用传统人工蜂群算法PID控制方式,其结果在符合系统控制性能指标的基础上,提高了系统的加载精度、响应速度、跟踪能力及稳定性,从而实现了对飞机舵机电液伺服系统多余力干扰的有效抑制,具有一定的应用价值。
