丘陵地区对纯电动汽车经济性分析及能耗优化方法
2020-12-04毕江嫚李琳辉周雅夫
连 静,毕江嫚,李琳辉,周雅夫
(大连理工大学运载工程与力学学部汽车工程学院,大连 116024)
随着传统燃油车的普及,资源短缺及环境污染的问题日渐严重,纯电动汽车作为新能源汽车中的重要分支越来越受到重视。纯电动汽车由于能量供给[1]来源多种多样,能够从根本上解决资源短缺的问题,实现零污染排放。并且,纯电动汽车具有动力系统结构简单、质量轻便、平顺性良好等多方面优势,更加符合开发商和消费者的市场需求。因此基于纯电动汽车的自身优势,开展对纯电动汽车的性能分析就显得尤为重要。
中外针对纯电动汽车从多方面开展了提高整车性能的研究[2-3]。汽车经济性作为评价车辆性能好坏的重要指标之一[4],越来越受到关注。狄金刚等[5]通过优化滚动阻力系数、载荷及整车工作效率等方法以标准工况下的行驶里程为经济性参照,提高了纯电动汽车经济性。黄万友等[6]运用田口鲁棒优化算法通过搭建电机转矩-电机转速及电机转矩-加速踏板开度变化率正交表,控制驱动策略,达到了提高纯电动汽车经济性的目的。以上学者通过优化汽车参数,合理分配电机工作点[7-8]的方式对提高行车经济性展开了研究。然而,道路坡度[9-10]作为外部环境之一,同样会对经济性产生影响。因此,针对坡度对纯电动汽车进行经济性分析和在坡度上进行能耗优化具有重要的研究价值。
据此,在丘陵地区以纯电动汽车为研究对象进行了经济性分析,并设计了一种能够有效降低能耗的动态规划算法。首先,设计了虚拟坡度,运用动态规划算法在虚拟坡度上控制电机转矩,优化车速,计算以优化车速行驶汽车的能耗,并从车速变化角度分析了坡度路况对汽车经济性的影响;而后在该虚拟坡度下,以无坡度行驶的经济时速控制车辆,计算行驶能耗,对比用优化车速和无坡度行驶的经济时速两种车速驱动车辆行驶的能量消耗和百公里节能百分比;最后,在真实路况坡度上验证提出方法的合理性。
1 理论基础
1.1 车辆建模
针对纯电动汽车搭建了数学模型,汽车受力分析图如图1所示。

Ft为驱动轮牵引力;FN为地面支持力;Ff为滚动阻力,Fw为纵向空气阻力;M为纯电动汽车质量;g为重力加速度;θ为道路坡度角;ν为行驶车速图1 纯电动汽车受力分析简图Fig.1 Force analysis diagram of electric vehicle
从汽车纵向控制的角度考虑,针对汽车纵向动力学模型,建立如下表达式。

(1)
Ff=μMgcosθ
(2)
(3)
式中:μ为滚动摩擦系数;t为单位时间;CD为风阻系数;A为迎风面积;ρ为空气密度。
纯电动汽车行驶过程中,驱动轮上的牵引力完全由电机转矩提供,电动机瞬时输出功率、转矩与牵引力关系式为
Pe=Ftv/η
(4)
Ttq=FtR/i
(5)
式中:Pe为驱动电机瞬时输出功率;η为驱动电机效率,它依据车辆自身电机外特性曲线图[11]插值查表获得;Ttq为电机输出转矩;R为车轮滚动半径;i为传动系传动比。
1.2 算法应用
动态规划算法[12-13]是一种通过将一复杂问题分解成若干子问题,逐步迭代直至搜索到全局最优解的优化算法。依据动态规划算法能在全局范围求解整个行程最优解的特点,为了能够让车辆在丘陵地区行驶时能耗最小,在整个行驶过程中运用动态规划算法,对电机工作点和车速进行控制。以能耗最小化作为提高纯电动汽车经济性的目标,优化车速,求解过程示意图如图2所示。

图2 动态规划求解过程示意图Fig.2 Dynamic programming solution diagram
(1)划分阶段:以固定距离为一步长将整个行驶过程离散成N个阶段,图2中k=1为第一阶段,k=2为第二阶段,以此类推。
(2)确定状态变量和控制变量:选取车速为状态变量(图2中初始状态变量为v0),并对其进行离散化处理;以电机转矩为控制变量,对车速进行控制。
(3)确定状态转移方程:

(6)
式(6)中:k-1为k-1阶段;k为当前阶段;a(k-1,j)为汽车加速度,与电机转矩密切相关;s为固定距离步长。
(4)计算单步能耗:

(7)

(8)
式中:dE为单步能耗,电机放电时,通过式(7)计算,电机能量回收时,通过式(8)计算;U为电池路端电压;r为电池内阻,忽略温度对电阻的影响,并将其简化为一常数。
(5)求解前k步解代价函数为
Jk[x(k)]=min{dE[(x(k)]+Jk-1[x(k-1)]}
(9)
式(9)中:Jk-1[x(k-1)]为k-1阶段最优解。
(6)逐步迭代,求解全局最优目标函数,完成全局优化求解。
2 实验及仿真分析
为了分析丘陵地区的行车经济性,构建了含有上下坡坡度信息的虚拟坡度数据,最大坡度为5%,数据特征如图3所示。

图3 虚拟坡度数据Fig.3 Virtual slope data
针对该虚拟坡度数据,应用所提出的动态规划算法,解算出的最优车速轨迹如图4所示。由图4 可以看出,车辆在无坡道路行驶时,保持无坡度道路的经济车速,即31 km/h;在进入有坡工况前,调整车速至对应该坡度的高效工作点车速;上坡过程中,汽车先在对应坡度高效率工作点附近运行,之后车速下降;由上坡进入下坡后的下坡过程中,车速增加,充分利用制动能量回收节约能耗;由下坡进入上坡后的上坡过程中,车速减小;由上坡进入无坡的无坡度的过程中,车速先保持不变,并在进入下坡路段之前,预先减速,为的是在之后的下坡过程中充分利用下坡的重力势能;由无坡进入下坡的下坡过程中,车速增加;最后由下坡进入无坡后的无坡路况中,车速保持无坡度道路的最佳经济车速。
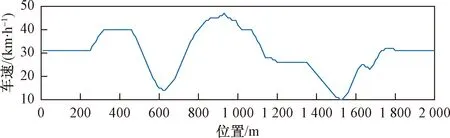
图4 虚拟坡度对应优化车速曲线Fig.4 Virtual slope corresponding to optimized speed curve
为了验证提出的方法能够降低能耗,首先计算车辆以无坡度平直路况下的经济时速行驶在虚拟坡度上汽车的能耗;而后将该方式获得的能耗与以优化车速行驶获得的能耗进行对比,所耗能量及百公里节能百分比如表1所示。由表1可知,提出基于动态规划的能耗优化方法能够有效提高经济性,在该虚拟坡度下,百公里节能百分比达到8%。

表1 虚拟坡度对应能耗及百公里节能百分比Table 1 Energy consumption corresponding and percentage of energy saving per 100 km to virtual slope
为了在真实坡度下验证提出的汽车能耗优化方法的合理性。在某一丘陵路段采集了实时坡度值数据,坡度数据结果如图5所示,运用所提出的优化算法获得的实际道路坡度下的优化车速如图6所示。以该优化车速控制车辆行驶的总能耗及百公里节能百分比如表2所示。仿真结果表明,在此真实坡度下,提出的优化算法百公里能耗下降了17%,验证了提出的优化方法的合理性。

图5 实际道路坡度数据Fig.5 Actual road slope data

图6 实际道路坡度下的优化车速Fig.6 Optimized speed at actual road gradient

表2 实际坡度对应能耗及百公里节能百分比Table 2 Energy consumption corresponding and percentage of energy saving per 100 km to the actual slope
3 结论
设计了虚拟坡度,针对坡度的变化从车速方面分析了纯电动汽车驾驶经济性,提出了一种基于动态规划的能耗优化方法。根据实验数据结果,得出以下结论。
(1)坡度变化会对车速产生影响从而影响行车经济性。
(2)在虚拟坡度下,对比使用无坡度道路的经济时速控制车辆行驶,采用提出的丘陵地区基于纯电动汽车模型的动态规划算法获得的优化车速控制车辆行驶,能够有效提高行车经济性。
(3)在实际采集道路坡度上,运用提出的优化算法,百公里节能百分比能达到17%,验证了优化方法的合理性。
