基于RobotStudio的焊接机器人视觉效果仿真研究
2020-12-02陈磊郭金妹罗国虎
陈磊 郭金妹 罗国虎

摘 要:文章提出了一种产生焊接视觉效果的设计方法,并以T型焊接工作站为研究对象,借助RobotStudio软件进行仿真。首先进行了工作站总体方案设计及布局;其次完成了仿真方案设计,创建了焊枪组件及设计了工作站逻辑。最后完成程序编制和仿真分析。仿真的结果表明:焊接工作站可以实现焊接过程的视觉效果。
关键词:焊接机器人;视觉效果;仿真
中图分类号:TP249 文献标志码:A 文章编号:2095-2945(2020)34-0024-03
Abstract: This paper presents a design method to produce welding visual effect, and takes T-type welding workstation as the research object, and simulates it with the help of RobotStudio software. Firstly, the overall design and layout of the workstation are carried out; secondly, the simulation design is completed, the welding gun components are created and the workstation logic is designed. Finally, the programming and simulation analysis are completed. The simulation results show that the welding workstation can achieve the visual effect of the welding process.
Keywords: welding robot; visual effect; simulation
引言
制造业是我国经济发展的支柱产业,随着制造业水平的不断发展,工业机器人被广泛应用于搬运、码垛、焊接和涂装等行业。由于焊接加工存在生产条件差、危险系数高、劳动强度大等因素,焊接机器人的应用最为广泛[1]。通过焊接机器人来完成特定的工作,能够提高生产效率,同时当不同产品需要焊接时,只需对机器人焊接程序进行编写,即可达到柔性化的生产需求[2]。
工业机器人借助仿真技术,可以在工业生产线使用之前事先模拟,在仿真模型中导入工业机器人和工作场景,并在仿真软件中对机器人进行轨迹规划和程序编写,从而合理配置生产线,降低企业投资成本,缩短工期,提高生产效率,亦可降低焊接过程中的人工风险,保障工人的生命安全[3]。
1 研究现状
武汉理工大学章锐等人基于自定义填充策略,计算各个目标点的偏移量,利用MotoSimEG-VRC离线编程软件进行仿真,然后将程序导入到真实机器人中,验证了方案的可行性[4]。山东理工大学孙增光等人对焊接机器人工作站进行了SolidWork建模和RobotStudio仿真搭建,根据实际情况研究短路过渡的焊接方法,创建了碰撞监控[5]。李怡林利用RobotStudio搭建机器人搬运、焊接于一体的双机协作工作站,完成了工作站的离线编程与仿真优化,为双机协作的生产线设计提供可行性参考[6]。但这些文献都没有涉及焊接过程中的电弧光和焊接后的视觉效果。
2 研究内容及总体设计
2.1 研究内容
本项目采用ABB虚拟仿真软件RobotStudio平台,以T型接头为研究对象,搭建与生产实际类型的研究平台,选择系统中的单台焊接机器人,然后对焊接工件进行焊接。由于RobotStudio具有强大且逼真的仿真能力,仿真平台中的效果几乎可以与实际生产一致。其次,利用软件的Smart组件功能,进行组件设计,可以观察工作单元的信号状态。最后进行RAPID语言进行程序的编写,该语言与C语言类似,可以方便的编写需要的程序,具体来说其研究的主要内容为:
(1)利用SolidWorks设计熔池三维仿真模型。
(2)根据研究对象布局机器人以及T型接头。
(3)创建Smart组件、仿真I/O信号等等。
(4)编制RAPID离线仿真程序。
(5)调整焊接的时间间隔,对比仿真结果,实现焊接过程的视觉效果的可行性。
2.2 总体设计
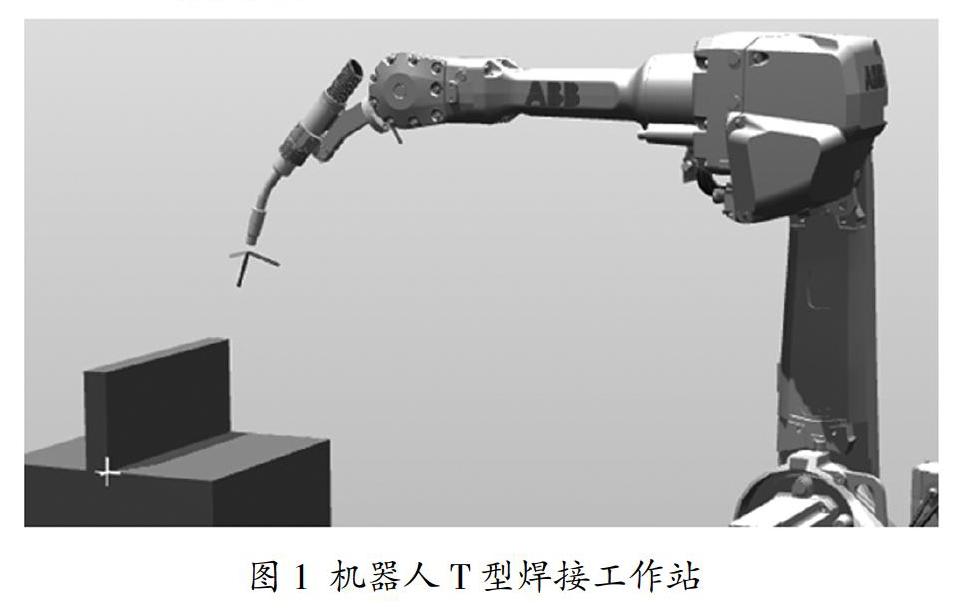
机器人T焊接工作站主要由焊接机器人和T型接头组成,焊接机器人选用IRB2600,这是工厂里常有的焊接机器人。利用SolidWorks软件制作椭球体,表示熔池,转换为.SAT格式后导入到RobotStudio仿真工作站中[7],同时T型接头的布局要在机器人可焊接的范围内,可以利用软件中的显示工作空间功能,该功能可以显示2D轮廓和3D体积,避免加工件超过机器人的工作范围,最终机器人T型焊接工作站如图1所示。本项目进行一个简单的焊接任务,焊接机器人只需完成一条直线的焊接任务,焊接开始有电弧光并且形成熔池,最终形成一条连续的焊缝。
3 仿真系统设计
3.1 Smart组件设计
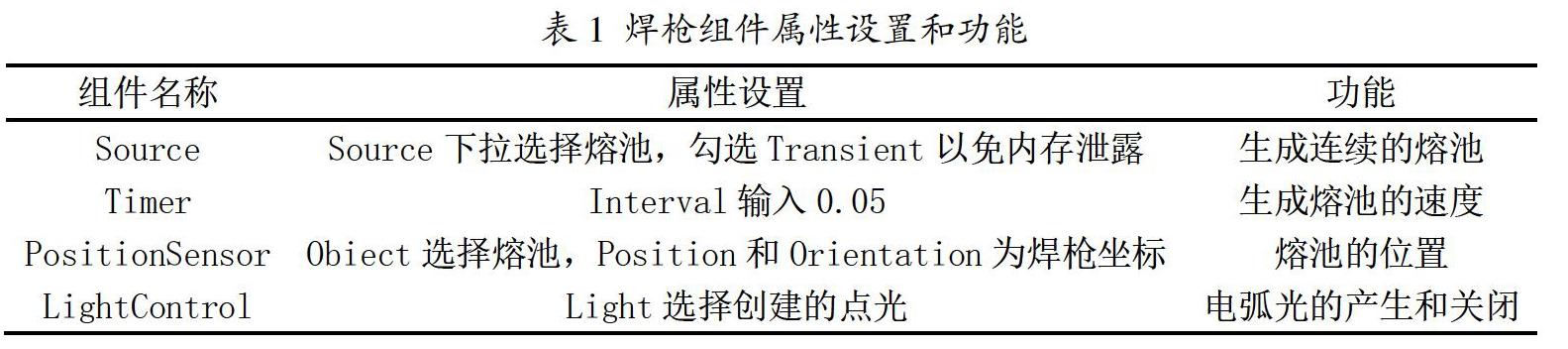
采用RobotStudio中的Smart组件可创建动态视觉效果[8],焊接工作站的视觉效果为焊枪组件SC_HanQiang,模拟真实焊接过程中产生的电弧光和焊缝。焊枪组件SC_HanQiang件包含Source子组件、Timer子组件、PositionSensor子组件、LightControl子组件四部分,完成的功能为:机器人从原点处移动到焊接起始点,当机器人到达焊接起始点Source子组件产生熔池,熔池产生的间隔时间由Timer 子组件控制,熔池的位置和朝向由PositionSensor子组件确定,同时LightControl子组件产生电弧光,焊接结束后,Source子组件关闭熔池,LightControl子组件关闭电弧光。电弧光的创建在RobotStudio圖形工具中,需要事先创建点光且打开高级照明。PositionSensor子组件属性中的Position和Orientation要分别赋予Source子组件属性中的Position和Orientation,这样才能保证熔池产生的位置在焊接处。这四个子组件的具体属性设置和功能如表1。
焊枪组件中的Smart设计逻辑如图2所示,该组件的动态仿真模拟了真实焊接的视觉效果。其中I/O信号用于连接各个组件之间的关系,Di_Guang作为焊枪组件的输入信号,模拟PLC的通信过程,控制LightControl子组件和Timer子组件的激活状态,Timer子组件的Output控制Source子组件的激活。
3.2 工作站逻辑设计
本文焊接工作站系统设计只需定义一个数字输出信号do_Guangyuan0,该信号用来控制焊枪组件SC_HanQiang数字量输入信号di_Guang。当焊枪到达焊接起始点,可使 do_Guangyuan0信号置1,那么焊枪组建接收到置1信号,就产生电弧光和熔体这样的视觉效果,工作站逻辑关系如图3所示。
4 系统编程与仿真
4.1 程序编制
本项目是完成T型焊接的工作任务只需完成一条直线的焊接轨迹,需要强调的是在程序结尾加了一个10秒的延时时间,用于观察焊接的轨迹是否正确。T型焊接焊接工作站的主要程序如下[9]:
PROC Path_10()
MoveL Target_10,v80,fine,tWeldGun\WObj:=wobj0; !机器人原点
MoveL Target_20,v80,fine,tWeldGun\WObj:=wobj0; !焊接起始点
SetDO do_Guangyuan0,1; !打开信号
MoveL Target_30,v80,fine,tWeldGun\WObj:=wobj0; !焊接终止点
SetDO do_Guangyuan0,0; !关闭信号
MoveL Target_10,v80,fine,tWeldGun\WObj:=wobj0; !回到机器人原点
WaitTime 10; !等待10秒,用于观察焊接效果
ENDPROC
4.2 仿真分析
仿真结束后,可观察焊接的效果,本文影响焊接的效果有焊接速度,即机器人运动的速度,Source子组件中熔池拷贝的时间间隔。当速度为V80mm/s时,Timer子组件控制熔池拷贝时间间隔为0.05s时,最后生成的效果如图4(a)所示。如果速度保持不变,时间间隔增加到0.2s时,效果如图4(b)所示。可根据实际焊接效果,动态调整虚拟仿真软件中焊接速度和时间间隔。
4.3 碰撞检测
工业机器人在焊接过程中,由于焊枪与工件的距离如果太近就容易出现碰撞,如果距离太远,则会出现电弧不稳定,出现气孔等焊接缺陷,因此焊枪和工件要保持在一个所规定的范围之内,而RobotStudio仿真过程中可以设置碰撞模块,在程序的执行过程中监控焊枪是否与焊接对象或者周边设备会发生碰撞[10]。在碰撞检测分析时,自行设定接近丢失的距离,比如3毫米,如果焊接机器在焊接的过程中,工具与工件距离小于3毫米,则显示接近丢失的颜色,反之不显示。如果发生碰撞,则显示碰撞颜色,碰撞颜色和接近丢失的颜色可以自行设定,比如碰撞颜色为红色,接近丢失颜色为黄色。另外还可通过轨迹跟踪功能查看仿真路径是否与焊缝位置一致,如果不一致,需要重新示教焊接点的位置。
5 结束语
本文通过搭建T型焊接工作站,主要涉及动态Smart组件的设计、工作站逻辑设计,机器人离线编程等内容。该方案设计了焊接过程中的视角效果,模拟了真实的焊接工作环境,通过仿真观察焊接效果,并进行人工修正,对指导实际生产具有重要的指导意义。但是本文并没有具体研究焊枪与工件之间的距离,这需要与实际生产对接,其次焊接表面压力、焊接时间以及熔融量,这部分也需要进一步探讨。
参考文献:
[1]杜望,张晓旭.机器人焊接工作站在汽车起重机卷扬箱焊接中的应用[J].电焊机,2009(5):183-185.
[2]孟国强,杜望.机器人焊接工作站在推土机后桥箱焊接中的应用[J].电焊机,2009(5):186-188.
[3]夏生健.工业机器人焊接生产线的设计及研究[D].南京:东南大学,2016.
[4]章锐,汪选国,刘伟,等.基于自定义填充策略的机器人中厚板多层多道焊离线编程与仿真[J].焊接技术,2019(12):69-73.
[5]孙增光,王士军,孟令军,等.基于RobotStudio焊接机器人工作站仿真设计[J].机床与液压,2020(5):29-33.
[6]李怡林.基于RobotStudio的双机协同工作站仿真设计[J].河南科技,2019(25):14-18.
[7]陈磊,王健,郭金妹.基于汽车水箱的机器人焊接工作站的設计与仿真[J].电子世界,2020(2):124-125+128.
[8]郝翠霞,叶晖.基于Smart组件的工业机器人码垛仿真设计[J].机床与液压,2018(8):63-66.
[9]叶晖.工业机器人应用虚拟仿真教程[M].北京:机械工业出版社,2014.
[10]郝建豹,许焕彬,林炯南.基于RobotStudio的多机器人生产线仿真设计[J].组合机床与自动化加工技术,2017(11):122-125.