龙门机器人激光焊接系统研制
2014-08-14杨永波等
杨永波等


摘要:研制了龙门机器人激光焊接系统,对龙门机器人激光焊接系统的结构概况、技术指标、机器人、激光发生器、控制系统及操作界面做了详细的说明,同时也对该系统的实际工作状态作了介绍。
关键词: 龙门; 焊接机器人; 激光焊接系统
中图分类号: TG432
Abstract: In this paper, the structure characteristics and application condition of gantry robot laser welding system are mainly introduced. It also summarized the gantry robot laser system and its characteristics of welding production. The technical index robot, laser generator control system and operation interface is described in detail. At the same time the system working state is also introduced.
Key words: gantry; welding robot; laser welding system
0 前言
随着我国轨道运输与交通建设的快速发展,车辆需求规模以及运行速度不断提高。车体作为轨道车辆的主要组成部分,需求大量增加同时对焊接质量与生产效率提出了更高的要求,在车体部件实际生产中手工焊已经越来越难以满足生产需要,如何提高效率和焊接质量成为首先需要解决的问题,新的焊接技术和高效能的自动化设备成为了必然的选择,自动化程度越高越能保证焊接质量的稳定性[1]。
焊接机器人具有一系列明显的优势:稳定和提高焊接质量,保证焊缝均一性;改善工人的劳动条件;提高单位劳动生产率等。焊接机器人近几年在我国焊接行业中获得了长足的发展。激光加工技术是一种集光、机、电于一体的综合性高新技术,属于无接触加工。其主要特点也就是无惰性,因此其加工速度快、无噪声。由于光束的能量和光的移动速度都可以调节,因此可实现各种加工的目的。由于光束照射到物体的表面是局部的,虽然加工部位的热量很大、温度很高,但移动速度快,对非照射的部位没有什么影响,因此其热影响区很小。尤其适合于薄板的高速焊接。目前激光加工正以自己独特的优势,逐步取代传统加工工艺,越来越受到工业界的青睐。
哈尔滨焊接研究所利用30多年研发、制造焊接专用设备的经验,结合在机器人应用、激光焊接技术以及在焊接材料研究等领域的成果,针对轨道车辆大型薄壁构件的焊接,研制了龙门机器人激光焊接系统,可以焊接接头形式为1 mm+1 mm、2 mm+2 mm、4 mm+4 mm的对接焊缝,也可以用于其他类似工件的对接、搭接及角焊缝焊接。该系统可以实现激光自熔与激光填丝两种不同的焊接方式,可以有效地提高薄壁构件的焊接质量与工作效率,并有扩展能力,以便于适应其它的方式方法,具有很好的应用前景。
1 系统结构与基本技术数据
“龙门机器人激光焊接系统”主要由机械系统、电控系统、机器人、激光器、水冷器等组成,设备见图1。
该系统采用龙门架结构,配备大功率光纤激光焊接系统,焊接工艺采用激光自熔、填丝焊。龙门架沿地面轨道行走,在龙门横梁上装有移动装置,焊接机器人倒挂在移动龙门横梁的悬臂上,移动龙门采用交流伺服双侧同步驱动,机器人沿龙门架横梁的移动为机器人的外部扩展轴。在龙门移动双侧导轨中间以及龙门导轨端头可以摆放多套工装夹具,实现交替装夹与焊接,以提高生产效率及激光器的利用率。焊接生产时龙门系统保持静止,焊接过程靠机器人和外部轴的协调移动完成。激光发生器、激光器水冷机、机器人控制柜、送丝机等均安放在龙门后方的平台上,保护气瓶安放在龙门侧面,便于更换。
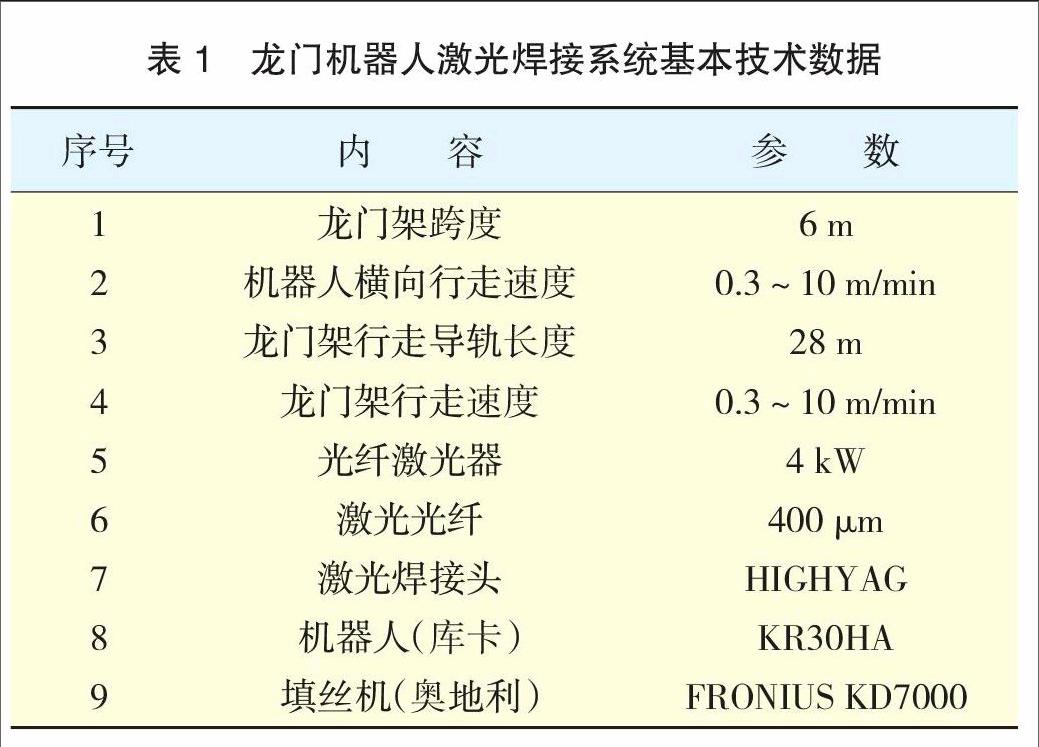
龙门机器人激光焊接系统基本技术数据见表1。
2 系统主要部分组成
2.1 龙门架及行走系统
龙门架及行走系统:包括龙门架行走导轨、2套龙门架行走小车(含2套交流伺服驱动机构)、1套龙门架(含2个立柱、平台)、1套移动滑台和电缆拖链等。
龙门架行走导轨固定在工件组装夹具的两侧,是由钢轨经精密加工而成,两侧导轨的内侧镶有传动齿条。龙门架行走小车固定在其上,由交流伺服系统通过齿轮齿条驱动,在导轨上做沿工件组装胎具的纵向运动,以实现多工位的焊接。
龙门架行走小车是由坚固稳定的钢结构所组成,左右各1个,其上装有双侧交流伺服驱动机构,两侧可横向调节的导向轮,保证龙门行走方向的精确引导,在小车的前后行走方向设置有安全缓冲器。龙门架行走小车下面固定在行走导轨上,上面安装主龙门架,并携带安放在主龙门架上的控制柜、激光电源、空气压缩机、保护气体气瓶等一同运行。
主龙门架包括2个立柱、横梁、载物平台和横向导轨。龙门导轨宽为6 m。龙门架的行走,由两侧立柱下面的小车通过双侧交流伺服电机驱动夹紧在龙门架行走导轨上的齿轮转动而行走(称为1,2轴)。通过二轴定位模块可以保证两侧的交流伺服电机同步驱动,保证行走平稳、无爬行。
在主龙门的横梁上安装有1个移动滑台,滑台采用交流伺服驱动(称为机器人外部轴),滑台上带有机器人安装底座,机器人倒挂安装在底座上,滑台可沿龙门横梁作横向移动,可实现0.3~10 m/min之间无级调速。电缆拖链安装在横梁的上方。各种电缆、气管、冷却水管等均安装在电缆拖链的内部。
2.2 光纤激光焊接系统
光纤激光焊接系统主要由光纤激光发生器、光路耦合系统、激光器水冷机、操作光纤、激光焊接头及激光防护装置构成。
