一种并联缆绳牵引式山地果园运输机的建模与分析
2020-12-02鲍秀兰孙培林胡成李善军陈红杨安定
鲍秀兰,孙培林,胡成,李善军,陈红,杨安定
华中农业大学工学院/农业农村部长江中下游农业装备重点实验室,武汉 430070
我国作为世界最大的水果出产国之一,水果产区主要分布在山地丘陵地带。丘陵山地地形复杂、坡度较大,果园机械化生产难度极大,随着丘陵山地水果产量的不断增加,山地果园的机械化成为我国水果产业发展亟待解决的问题[1-2]。随着山地果园运输问题的日益凸显,研发运输高效、适用范围广、灵活性强的山地果园运输机对我国果品产业的进一步发展具有重要意义[3]。
目前,国内的山地果园运输机大多以轨道式[4]、索道式[5-6]为主,轨道式又分为双轨道式[7]和单轨道式[8]2种。在此类设计中,运输机均具有独立的牵引和定位系统,对于精度要求较高的场合还引入了避障系统,这使得轨道运输机的应用范围更为宽泛[9-11]。但由于山地丘陵地区地形多变,对轨道式运输机设施的实际铺设造成了一定程度的影响。
江西省赣州市拥有世界最大的脐橙种植基地,其得天独厚的气候条件为脐橙品质提供了保障。赣州市地处群山之间,山地丘陵覆盖率高达80.98%,全市平均海拔为300~500 m,山地坡度较陡,达到了16°~45°。多变的地形、独特的地势,使得赣州地区的果园具有突出的山地果园特征。
在研究并联机器人结构的基础上[12-14],本研究在参考赣州市实际地形的基础上,提出了一种缆绳牵引式并联机构,建立缆绳式运输机的系统模型,旨在简化运输机结构,进一步扩大山地果园运输机适用范围,为并联缆绳牵引式山地果园运输机的研制提供理论基础。
1 材料与方法
1.1 缆绳式运输机的模型参数
1.2 运输机工作过程与控制规划
该运输机机构的主要运输过程为:将装满采摘水果的果篮置于山顶立桩平台,并悬于缆绳末端的吊钩上,每个吊钩连结2~3根缆线,每根缆线的另一末端连接1个卷筒,卷筒外接电动机与减速器。每根线缆均由单独的电机控制牵引速度,通过电机的调速控制实现对线缆牵引速度的调控,进而实现果篮以不同的路径和速度往山下运输。
为降低地形因素对果篮降落路线的精度与落地点准确度的影响、降低缆绳因自身质量与运动造成的摆动偏差、消除系统的响应迟滞和临界抖动现象,对果篮设置独立的升降控制装置,通过在果篮上吊索末端安装按钮的方式实现唯一控制,保证果篮的临时升降不受缆绳运动的影响。
对于不同的果山,其垄道间距、宽度、数量等参数不尽相同。若要使控制系统能满足不同的场地需求,需要将上述参数输入自定义定位模块中,系统自动将垄道的位置信息换算为每条缆绳的长度信息,生成与各个垄道对应的独立定位子程序。同时将定位程序作为中断程序模块化封装,以便于后期的修改、移植、独立调用。中断程序由垄道上的人工信号触发,在实际应用中可以实时调用。当某条垄道上有临时升降的需求,便可通过触发相应垄道的定位模块中断程序,使得缆绳控制吊篮悬停在该垄道上,并为升降系统的运行做好准备。
1.3 并联机构路径模型的建立
对于大跨度的绳牵引并联机构,绳索的质量是不可忽略的因素,绳索在自身质量的影响下悬垂并伴随运动摇摆现象。为了便于模型的建立,计算中将实际的运输路线简化为直线[15]。根据设定的参数绘制出运输机的路径模型(图1)。
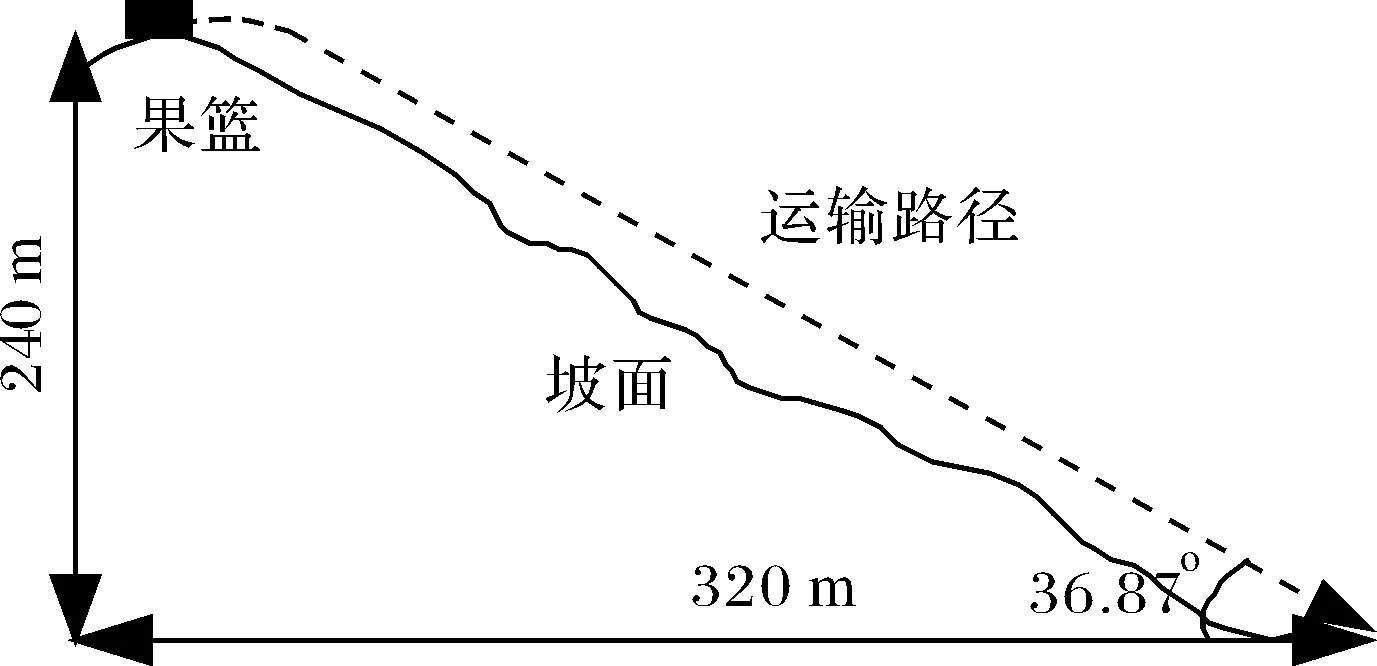
图1 运输机运输路径简图
对三维路径模型分别进行运动学和力学分析,并在数学模型的基础上建立运动模型和力学模型,分别用于研究绳缆运动速度及绳缆的受力情况。
1)三维路径模型的建立。并联机构中包含3个立桩,设备工作范围为立桩所围成的三角形区域。为便于分析与计算,将模型中所有果篮运输路径均近似为直线。三角形工作区域可能包含其他没有立桩的果山,为简化分析,针对工作区仅包含3座设有立桩(A、B、C)的果山的情况进行研究,如图2A所示。当实际果园中只需要对2座果山进行运输时,可简化成二维模型,如图2B所示。
A:果山路径三维模型 Three-dimensional route model of fruit mountains; B:两座果山的二维路径模型 Two-dimensional route model of two fruit mountains.
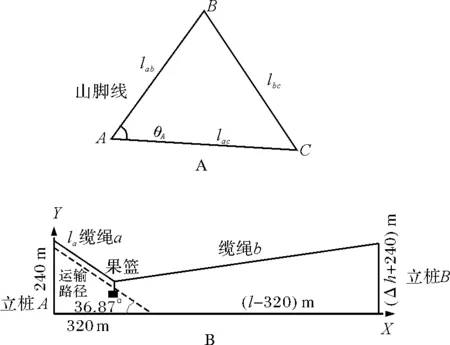
令3座果山间的距离分别为lab、lbc、lac,缆绳a、b、c的实时有效长度分别为la、lb、lc,缆绳a、b、c的速度分别为Va、Vb、Vc,运输路径偏角分别为θA、θB、θC。由于lab、lbc、lac可由实际情况修改设定,运输路径偏角θA、θB、θC也会随之改变。以下将对立桩A和路径偏角θA进行分析,另外2个立桩的路径偏角可由相同的方法得出。假设三维路径模型中每条路径的倾角均为36.87°,由于路径偏角是自由可变的,当由立桩A所在果山向山底运输果篮时,运输路径可能偏向于AB也可能偏向于AC。设路径所在ΔASA0平面与ΔABB0A0面的夹角为α,S点为运输时的果篮下降的末端位置点,立桩A的工作路径如图3所示。
图3 运输机运输轨迹图
图3中,AS为运输路径,夹角α为路径AS的自由偏角,且α∈[0,θA],由此建立数学模型。
2)运动模型的建立。令立桩BB0顶部到果篮吊钩位置点S的距离为lBS,立桩BB0底部到果篮吊钩位置点S的距离为lB0S,则有:
(1)
假设果篮从A点到达S点保持匀速,令速度为常数k,单位为m/s,则缆绳b的长度lb与时间t的函数关系为:
(2)
同理可得缆绳c的长度,通过对时间的求导,可得3条缆绳的运动数学模型为:
Va=k
(3)
(4)
(5)
3条缆绳的速度Va、Vb、Vc分别由对应立桩处的电机控制调速,当B、C立桩分别独立作为主动吊索塔时可由同理推得对应的运动模型。
1.4 运输机系统力学模型的建立
果篮的运输路径为线段AS,P点为运输时的果篮实时位置点,假设t时刻果篮到达线段AS的P点处,根据三角函数关系,易得:AP=kt∈[0,400]。a、b、c3根缆绳同时作用于吊钩,使得吊钩受到来自3个方向的牵引力,牵引力间的相互作用确定了果篮运输路径AS的自由偏角α。建立如图4所示力学模型,取过P点的水平面进行分析,图4中,A0、B0、C0分别为A、B、C3点在过P点的水平面上的投影,为便于受力分析,令Fa与X轴共线。

图4 路径模型受力分析图

(6)
(7)
同理可得缆绳b的仰角γb:
(8)
由于夹角∠A0P0C0与∠A0P0B0是随时间变化的,在ΔA0P0C0和ΔA0P0B0中有:
(9)
由公式(7)和(9)可推出∠A0P0C0和∠A0P0B0。
如图4所示,Fa、Fb、Fc分别为缆绳a、b、c上的牵引力,令吊钩与果篮总质量为G,则缆绳a、b、c上的力学方程为:

(10)
Fbcosγbsin∠A0P0B0=Fccosγcsin∠A0P0C0
(11)

(12)
由公式(7)~(10)可得缆绳a、b、c上的牵引力Fa、Fb、Fc变化规律。
(13)
(14)
(15)
由式(13)~(15)可知,绳缆上的牵引力是关于时间t与偏角α的二元函数。3个立桩之间的水平距离lab、lbc、lac是可灵活设定的参数,偏角α会随着三边长度的改变而改变,运动速度常数k是可以根据实际应用情况控制电机来调整的参数。
2 结果与分析
利用Matlab软件对模型仿真处理,仿真过程中所设置的参数为lab=3 200 m、lbc=3 500 m、lac=3 700 m、k=2.5 m/s、Δh∈(0,50)m、θA∈(0°,180°)、α∈(0°,60°) , 仿真所得的曲面图如图5、图6所示。图5为绳缆b、c的速度变化图谱,图6为3条绳缆上的牵引力变化图谱(以下所有图谱中时间均是对160 s的时间长度进行100次等分采样;图谱中偏角α均是对α变化范围进行100次等分采样)。
由以上仿真结果得知,对于三立桩式的并联运输机构,在运动方面:当缆绳a以2.5 m/s匀速运动时,缆绳b、c的起始速度将在1~2 m/s内变化且会着时间的增加而逐渐减小。随着运输路径偏角α的增大,缆绳的初始速度会逐渐减小。在受力方面:在果篮匀速下降的运输过程中,绳缆a、b、c上的牵引力随时间的增加逐渐增大,缆绳a的增幅速率最大,b、c的增幅速率基本一致但均小于a。在偏角α的变化范围内,当偏角为中间值时缆绳a上牵引力最大,为两侧极限值时缆绳a上的牵引力则最小;缆绳b上的力随着偏角的增大而逐渐减小,力与偏角负相关;缆绳c上的力随着偏角的增大而逐渐增大,力与偏角正相关。通过建模得到的仿真数据与数学模型相符合,充分证明了模型的正确性与可靠性。
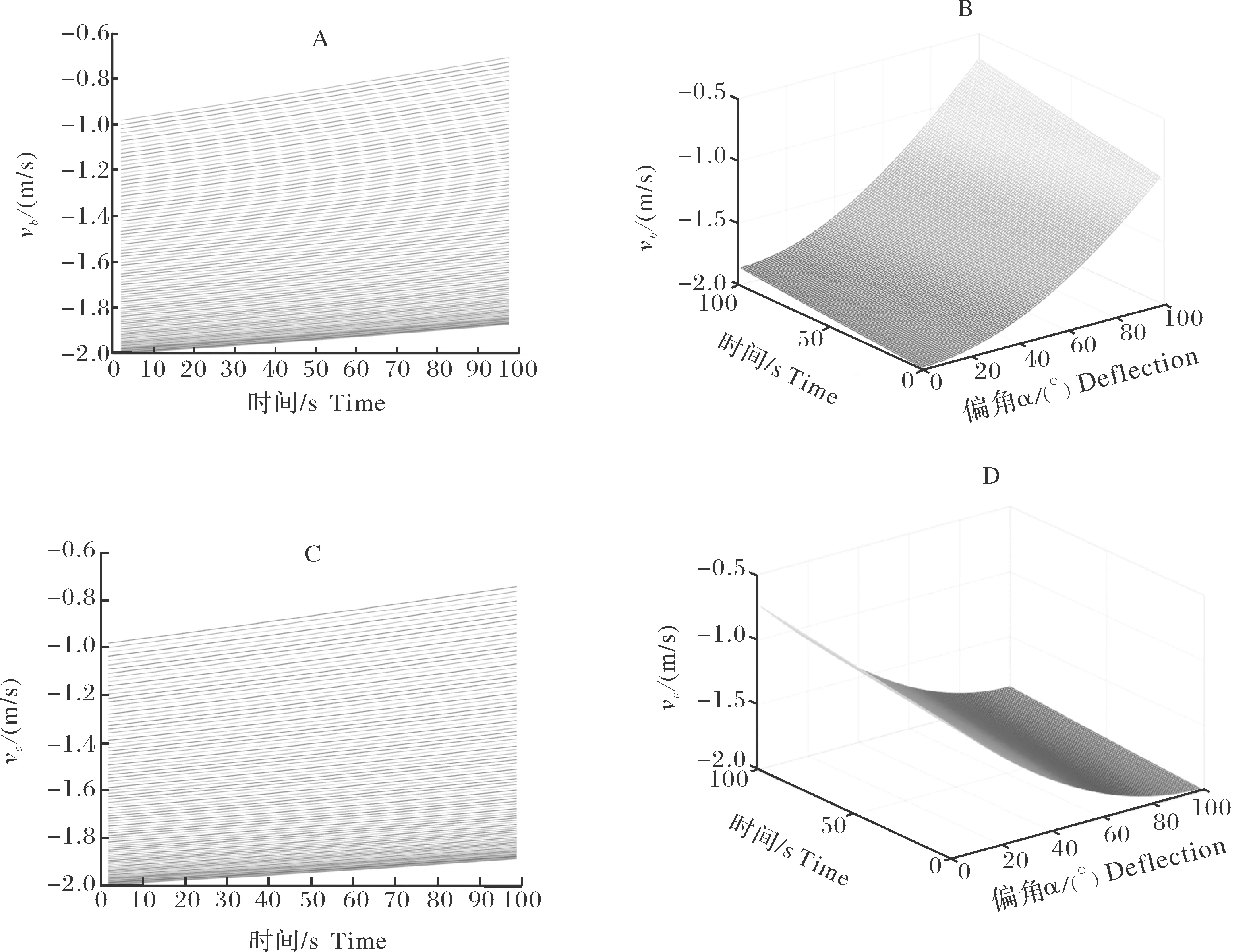
A,C:vb,vc随时间变化曲线Time-varying curve of vb,vc;B,D: vb,vc随时间和偏角变化 Variation curve with time and declination of vb,vc.
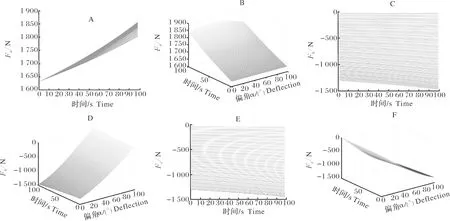
A,C,E:Fa,Fb,Fc随时间变化曲线 Time-varying curve of Fa,Fb,Fc; B,D,F: Fa,Fb,Fc随时间和偏角变化曲线 Variation curve with time and declination of Fa,Fb,Fc.
3 讨 论
本研究针对山地果园运输的要求,提出了一种以钢丝缆线牵引为基础的无轨式缆绳运输机,通过桩点处电机控制果篮上钢丝缆线的运动来实现货物低空运输工作,再由吊索上的独立升降系统控制果篮的升降,使得整个运输过程精简高效。在模拟实际赣州果园地形的基础上,建立了运输机的力学模型并进行数值仿真分析,仿真结果表明在不同的运输路径偏角下,运输过程中缆绳上速度与牵引力缓慢且均匀的变化,验证了并联机构在模拟运输过程中能保证系统的稳定性,也满足了山地果园机械化运输的基本要求。并联机构三维路径模型的分析方法,还可用于模拟两座果山及多座果山之间的运输情况,充分发挥了并联机构工作空间大、结构简单、灵活性等特点,机构的可重构性也进一步扩大了运输机的适用范围。
