无人搬运底盘机器人应用于智能船舶物件作业的方案设计
2020-12-01刘保凯
文/刘保凯
1 前言
传统船舶随着科技的进步在不断减少。船舶自动化设备如果不能及时成为辅佐船员的有效手段,船员工作强度便会与日俱增。其中轻量货物(货物重量小于150kg)延船体的纵向搬运为占据船员大量体力的工作内容之一。这种工作内容包括但不限于:油漆的搬运;货舱探测时,供氧设备的搬运;艏尖舱物料的搬运;舱锁、地锁、地漏塞;其他可能存在的应急事件中的纵向搬运。目前主流的搬运方式有两种:平板车加人力拉动,此种方法简单易操作,费用低廉,但耗费人力;延船体的纵向自动人形电梯,此种方法省力,但建设成本与维护费用高昂,且可能会影响其他船舶作业,所以鲜有船舶配备;电动助步车,此种方法费用比较低,但是需要人工驱动,且受地形影响较大,不利于穿梭在船舶大舱舱口之间。
以往的航海船艺中,由于种种因素的限制,无人搬运设备无法得以实现。随着局域网技术的发展,电子标识系统的成熟,以及无人搬运设备自身的不断升级,无人搬运底盘机器人在船舶上的应用可能性日益显著[1]。
2 无人搬运地盘机器人技术
无人搬运机器人及其底盘。底盘包括底板、从动单元和驱动单元。从动单元用于承受底盘及承载物的负载,包括多个从动部件,多个从动部件布置在底板上,使底板能够平稳运动(即不发生倾斜、振动等)。驱动单元包括第一驱动部件和第二驱动部件,第一驱动部件和第二驱动部件对称地位于底板的两端。无人搬运机器人的底盘具有结构紧凑、尺寸小且承载能力强的优点。
用机器代替人工搬运,解放了整个船舶的运输环节的劳动力,为船舶大大降低了人力成本。
3 船舶无人搬运地盘机器人设计
3.1 本应用机器人参数设计
以现有技术为基础,在可实现范围内,对于机器人参数的设计包括:
集成设备尺寸:
长x 宽x 高:800mmx560mmx220mm(底盘)
外形扩展后尺寸:
长x 宽x 高:800mmx560mmx520mm(上 接外设装备)
六轮,前后四轮导向,中间两轮承重。
重量:小于70KG。
接 口:Power&DO(四路,总带载能力24V/2A)
DI(八路 NPN 型)
网络接口:有线网络接口三路千兆网络
无线网络:主流无线网卡
电池:48v35AH 锂电池续航16 小时或空载25KM
充电0~80% 2h 内充放次数>1500 次
操作面板:8.0 寸触摸式显示屏(连续轻触n 次唤醒),配备在机器人前脸,与地面呈70°夹角。
蜂鸣器,扬声器,或二者选其一。
最大负载能力:150KG,最大牵引力:150N。
通过性:坡度<5°台阶<0.5cm 间隙<4cm
定位精度:±1cm
还需搭载的功能,包括自动充电功能,3D避障功能,5m 内标识信息读取功能,反光板导航功能等等。
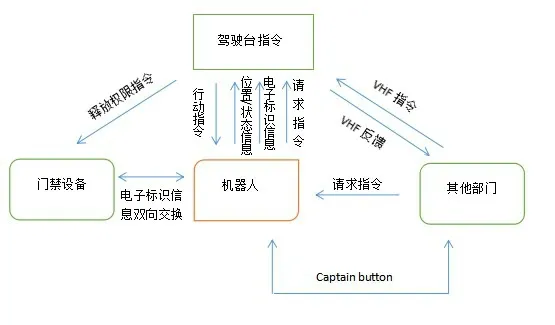
图1
3.2 控制系统设计
3.2.1 其他部门现场操作机器人,机器人反馈这种指令到驾驶台,驾驶台授权后方可执行。通过此种设计,可以让驾驶台即时掌握机器人动向及机器人正在进行的作业。还可以防止外部人员对机器人下达的无关指令。
3.2.2 其他部门通过甚高频联系驾驶台,驾驶台发送相关指令到机器人,以满足其他部门需求。通过这种设计,可以让船员随时随地召唤机器人,但是需要VHF 或者其他通讯设备配合。
3.2.3 机器人更新路径上遇到的所以电子标识信息(包括固定式和移动式电子标识)给驾驶台。更新负重、电量等信息给驾驶台。通过这种设计,可以让机器人完成自动巡视工作。让驾驶台时时掌握船舶来访人员位置,辅助驾驶员判断是否有犯罪情况发生。对于某些区域人员突然异常聚集,或者限制区域发现有来访人员进入的情况,加以控制。
3.2.4 机器人与门禁设备(电梯等)双向交换电子标识信息,并由双方反馈到驾驶台,由驾驶台手动/自动发送释放指令给门禁设备,从而是机器人得以通过从而继续作业。
3.2.5 在机器人面板设置Captain Button.实现现场工作人员对机器人的绝对控制。通过此种设计,工作人员可以现场获得机器人的绝对控制权,方便维修及应急操作。可以通过触发多个CB,向驾驶台传达秘密协定报警信号。还可以通过对机器人的绝对控制,实现3~4 台机器人现场合体,共同协同合作,实现对大件物品的搬运。
3.3 应用系统设计的关键技术
3.3.1 船舶电子标签与标识系统
电子标识的本质是无源陶瓷基电子标签,其基于超高频识别芯片并存储单位身份数据信息。 工作频段为:超高频 920 ~ 925 MHz。主要由 3 个部分组成: 存储单元、天线部分以及控制单元,其中的控制单元由基带部分和射频部分组成。电子标识所包含的信息数据具有唯一性,电子标识制作过程中在标识芯片ROM 中写入了 CID,而不是由中心站分配而来,即每个电子标识各自独有的 ID 号码,这个号码,兹诞生起就不可更改。
电子标识具有永久、固定的“身份证”功能以及长期、可签注的“居住证”功能,是信息“黑匣子”,根据智能船舶管理的需求,船员及船舶来访人员等需要授权或监管需用的“电子身份标识”或“电子证书”可包括 :“船舶身份标签(船舶电子身份证)”“船舶卡(船舶/驾驶台电子身份识别)”“设备电子标签(设备电子‘身份证’与‘居住证’)”,以及“船员卡(船员电子身份识别)”等,其中“设备电子标签”又可包含 :“电梯电子标签”“雷达电子标签”“救生筏电子标签”等[2]。
无人搬运底盘机器人装配的是与船员同等授权的电子标签。并附加读取装置,随时随地记录附近15 米范围内的电子标识信息。在输出本身的电子标识同时,也读取附近的电子标识。
3.3.2 局域网
由于海上地理地形的限制,海上数字通信模式通常采用无线局域网,利用射频发射接收器,通过海上空气作为媒介进行信号传输与接收。根据无线局域网的传输介质和频段不同,分为以下 3 种类型。
3.3.2.1 红外线无线局域网。利用红外线作为进行信号加载介质,优点是不受任何国家频率的管制,缺点是传输范围较窄,且易受干扰。
3.3.2.2 微波无线局域网。利用微波作为基带信号传输载体,包括一个中心站,和最多36 个外围站以及若干转发器组成。
3.3.2.3 扩频无线局域网。将基带信号频谱进行扩频,再利用射频发射器进行传输,这种模式可以支持较远距离的传输,并且信号传达率高,安全性好,本文利用此种方式[3]。
IEEE802.11 是在1997年由众多局域网以及计算机专家审定通过的标准。IEEE802.11规定了无线局域网在2.4GHz 波段进行操作,这一波段被全球无线电法规实体定义为扩频使用波段。无人底盘机器人的无线局域网配置也基于802.11b 标准[4]。
机器人的网络结构采用基站接入型,即:采用移动蜂窝通信网接入方式组建无线局域网,驾驶台即为基站,各站点(机器人/其他带有电子识别标签的单位)之间的通信是通过驾驶台接入、数据交换方式来实现互联的。在此基础上,各底盘机器人不仅可以通过交换中心(驾驶台)自行组网,还可以通过广域网与附近其他带有电子识别标签的设备依靠远地站点组建自己的工作网络,从而实现多个机器人共同协作,完成单项作业。
3.3.3 伺服电机与PLC 处理单元设计
PLC 处理单元与驾驶台、伺服控制器和AD 模块相连,在得到第一控制命令信号后,PLC 模块会通过高速脉冲信号,分配速度和方向指令给伺服控制器通过伺服电机的执行,实现底盘机器人的初始化运动。 输出的高速脉冲用于控制伺服电机的运转速度和运转角度;经过延时T 后,脉冲信号由伺服电机传入AD模块 ,AD 模块通过采集编码器输入的高速脉冲信号,用于计算电机转动的角度,从而得到底盘机器人的新位置和运动状态,如果推算位置和定位位置一致,则继续这种运动,如果产生偏差,则通过PLC 模块进行纠正[5]。
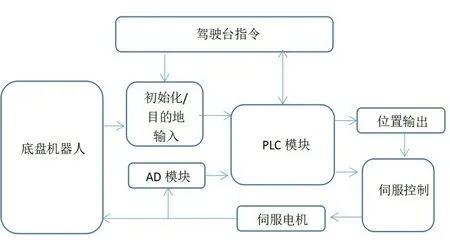
图2
4 局限性
无人底盘机器人用于船舶的局限性,体现在:
4.1 不适用于大风浪天气。
4.2 保养相对来说比较繁琐,且在很难实现船舶人员自维修。
4.3 槛,管路,水密门等。
4.4 安装调试周期较长。如非船舶出厂时配备此系统,而是后期加装配备,则需要的安装时间较长。
5 结语
在智能船舶的研发进程中,无人底盘机器人绝不是终点和目的,只是过渡而已。但是这个过渡阶段对于实现自动化船舶来说,具有重大意义,同时也具有一定的挑战性。
对无人地盘机器人这一探索,为将来实现船体的自动搬运功能,自动分拣功能乃至自动修复功能,都提供了现实的可能性。无人底盘机器人,很有可能应用在船体上。根据以上对船舶无人底盘机器人控制系统设计和应用前景分析,以期进一步强化船舶自动化。
