基于超高空间分辩率无人机影像的面向对象土地利用分类方法
2020-11-30刘舒,朱航
刘 舒,朱 航
·农业航空工程·
基于超高空间分辩率无人机影像的面向对象土地利用分类方法
刘 舒1,朱 航2※
(1. 吉林建筑大学测绘与勘查工程学院,长春 130118; 2. 吉林大学机械与航空航天工程学院,长春 130022)
为明确基于无人机超高空间分辨率影像的土地利用分类方法,尤其是有效特征和算法的选择,该研究获取吉林省德惠市一农耕区超高分无人机影像,获取区域正射影像图和数字表面模型,计算地形指标,采用面向对象方法进行土地利用分类研究。首先,采用随机森林算法,以光谱特征为基础,依次引入指数、形态、地形、纹理特征,建立5种特征选择方案,分析各类特征对分类效果的影响。其次,以Boruta特征选择算法获取的优化特征集为基础,采用随机森林算法、朴素贝叶斯算法、逻辑回归算法和支持向量机算法分类,分析不同算法的分类效果。结果表明:采用5种特征选择方案分类,引入形态特征时总体精度降低,引入其他特征时总体精度逐渐提高。5种特征共同参与的分类效果最佳,总体精度为98.04%,Kappa系数为0.980。错分主要发生在裸地和宅基地,漏分主要发生在草地、裸地、水渠和道路。错分和漏分主要是因为这几种类型对象具有相似的光谱、形态、纹理特征或相似的分布位置。采用优化特征集分类时,相比其他算法,随机森林算法更擅长处理高维特征集,获得最高的总体精度98.19%,最低的错分和漏分误差,分类效果最佳。借助无人机超高空间分辨率影像提取地形信息、形态信息,可以有效辅助土地利用分类,并能提高传统分类方法精度。
遥感;土地利用;无人机影像;面向对象;特征选择;随机森林
0 引 言
实时可靠的土地利用信息,是土地利用变化监测的基础[1]。目前常使用卫星获取的多光谱数据提取土地利用信息[2-3]。由于受数据空间分辨率、获取条件和成本的限制,常用的卫星数据无法识别精细尺度的地物细节,且数据获取时间受卫星重访周期制约。近年来小型无人机迅速发展,具有操作简单,使用灵活,空间分辨率高,且在云下操作等特点,弥补了卫星遥感影像的应用限制[4]。此外,无人机可根据需要加载多种传感器获取数据,也可以一定航高和重叠度,按照规定航线获取影像,建立数字表面模型(digital surface model, DSM),扩展可利用信息[5-6]。目前无人机遥感技术已被广泛用于土地利用分类[4-8]、农情监测[9-10]、自然灾害分析[11-12]、专题信息提取与专题图制作[6]等领域中。当采用无人机影像进行土地利用分类时,影像高空间分辨率在降低混合像元带来影响的同时,也增大了计算机的数据处理量。过高的空间分辨率加强了地物细节,增大同类地物间的细节差异以及不同地物间的相似程度,降低分类精度[13]。若基于无人机常规传感器获取可见光波段的影像进行分类,较低的光谱分辨率也会影响分类的效果。
常用的分类方法包括面向像素方法和面向对象方法。面向对象分类以分割后的对象为基本单元,平滑了影像噪声和不必要的细节;减少参与运算的数据量;整合不同类型数据;引入对象的形态、上下文等特征,进一步挖掘分类可用信息,提高分类精度和结果可靠性[2]。然而,面向对象的方法虽弥补了基于无人机可见光影像分类的不足,但在结合多种数据的同时,也增大了特征空间的维度[1],其中的次要特征可能起到噪声作用,降低分类精度[14]。随机森林是一种集成分类算法,因其强大的数据整合与灵活处理能力,近年来被应用在医学、生物学、管理学、遥感等领域,并取得了稳定可信的研究成果[15-16]。目前,该算法已被用于基于多光谱、雷达和无人机影像的土地利用类型提取中[8,17-18]。
无人机影像与传统遥感影像相比具有一定的相似性和特殊性。传统方法的适用性、新方法的可行性以及分类特征的作用仍然被广泛讨论[19]。刘凯等[20]以红树林为研究对象,讨论了不同类型无人机数据的分类效果,刘斌[21]讨论了不同影像分辨率对分类结果的影响,耿仁方等[7]讨论了以不同影像处理软件获得DSM和数字正射影像图(digital orthophoto map, DOM)对分类的影响。目前广泛采用光谱、指数、纹理和上下文特征,仅少数研究用到反映地形的地物表面特征。此外,单一类型特征,尤其是由超高分无人机影像提取的特征,对实际分类效果的影响尚不明确,采用不同算法对区域分类结果的影响也需要进一步讨论。本研究获取吉林省德惠市一农耕区的无人机超高分可见光影像,采用面向对象的随机森林算法,进行土地利用分类,分析不同类型特征对分类结果的影响,并借助Boruta特征选择算法获取优化特征集,分别采用随机森林、朴素贝叶斯、逻辑回归和支持向量机算法分类,分析不同算法的分类效果,评估分类方法的实用性。
1 研究区与数据来源
1.1 研究区概况
研究区位于吉林省德惠市的农耕区。区域地理位置:44°34′N,126°17′E,属于温带大陆性气候,光照充足,降水量较少。区域内作物以一年一熟的水稻、玉米为主。本研究影像拍摄于9月下旬,此时水稻成熟,部分已被收割并堆放在田间,田块内可见割茬残留。玉米田尚未大规模收割[22]。田间分布有水渠,用于排水和灌溉。区内还分布有道路、草地、农村宅基地以及鲜有植被生长的裸地。道路两侧的绿化带以及位于房屋周围的杨树为林地。依据2017年发布并实施的土地利用现状分类标准,将研究区土地利用类型划分为:水田、旱地、裸地、道路、水渠、宅基地、林地和草地[23]。
1.2 数据获取及预处理
于2018年9月23日下午采用大疆精灵4搭载非量测相机分10条航带进行拍摄,设定航高为60 m,航向重叠度为70%,旁向重叠度为65%,共获取研究区影像104张。影像传感器为CMOS,可获取红光、绿光和蓝光3个通道的像片,像片尺寸为4 000´3 000像素,空间分辨率约为0.04 m,为超高空间分辨率影像[7,19]。航片借助摄影测量软件进行匹配,并生成DSM和DOM,如图1所示。

图1 研究区数字表面模型(DSM)和正射影像图(DOM)
借助ArcGIS软件生成区域表面坡度、坡面、山体阴影图等。DOM包括红(),绿(),蓝()3个波段,在ENVI5.1中以DOM为基础计算5种仅基于RGB波段的植被指数,生成指数波段,并将以上数据合并为分类基础影像。植被指数包括红绿比值指数(red green ratio index, RGRI),归一化绿蓝指数(normalized green-blue difference index, NGBDI),归一化红绿指数(normalized green-red difference index, NGRDI),过绿指数(excess green index, EXG)和差异植被指数(visible-band difference vegetation index, VDVI),计算公式如表1所示[24]。
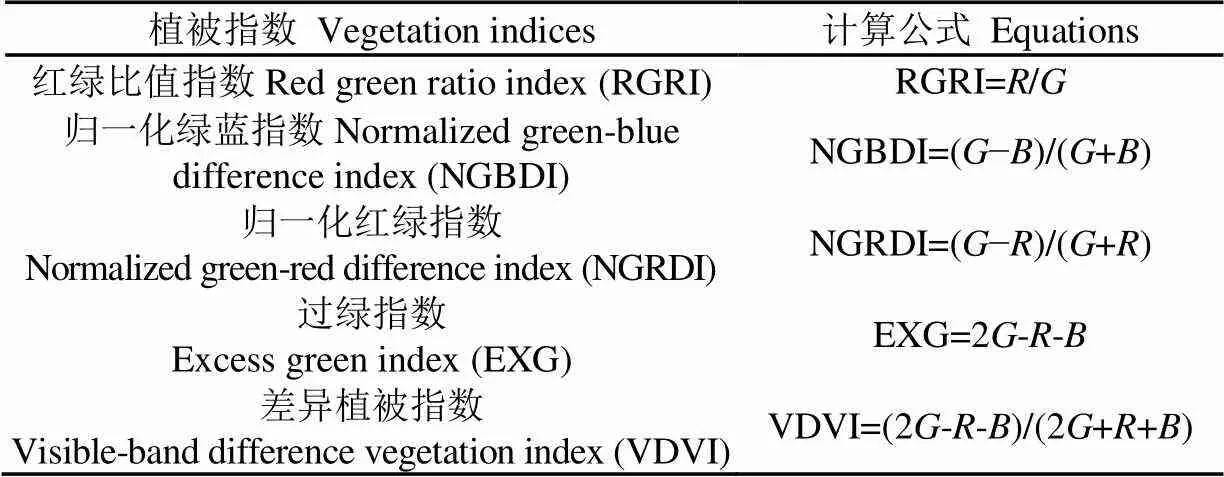
表1 指数特征计算公式[24]
注:为DOM红波段,为DOM绿波段,为DOM蓝波段。
Note:is the red band of DOM,is the green band of DOM andis the blue band of DOM.
2 研究方法
2.1 随机森林分类算法原理
随机森林算法(random forest, RF)实质是决策树的组合。本研究应用R语言软件Random Forest语言包实现分类过程。从样本集有放回地抽取约2/3样本构成训练集,再从其包含的全部特征中随机抽取有限个样本建立决策树,并利用未被抽取的样本估计分类内部误差。重复此过程,建立多棵决策树,构成随机森林模型。在为新数据分类时,所有决策树独立预测结果,通过投票方式决定目标的最可能类别,并得出袋外误差(out-of-bag error, OOB误差),用以评价分类结果精度和分类特征重要性[2-3,17]。袋外误差越小,模型分类效果越好。
2.2 基础数据分割
本研究采用Ecognition软件多尺度分割模块进行分割,分割前需设置尺度参数,各图层的权重,形状异质性权重(Shape)和紧致度异质性权重(Compactness)。本研究将所有图层权重设为1,并应用ESP(estimation of scale parameter)插件通过试验确定其他参数的取值。ESP插件由下至上迭代分割,以对象局部方差(local variance, LV)估计影像对象内部异质性,根据局部方差变化率(rate of change of LV, ROC)确定分割尺度[25-26]。迭代时首先将形状异质性权重(shape)、紧致度异质性权重(compactness)以0.1为步长,取遍0.1~0.9的所有值进行多次分割试验,确定理想的shape和compactness取值分别为0.8和0.6,此时获得的ROC曲线和LV曲线如图2a所示。
图2a中LV曲线有多个峰值,即可获得多个最佳尺度取值。为保证对象类型的纯度,取第一个峰值对应的最佳分割尺度45为本研究分割尺度,局部影像分割结果如图2b所示。对于农田部分虽然分割较细,但边界与地物实际边界位置相符,分割结果可靠。
2.3 对象特征提取
共提取对象的100个特征信息,包括以下5大类(表2)。
1)光谱特征(Spec_Feat):DOM中、、波段的均值(Mean)、标准差(standard deviation, SD)、以及波段最大差异(Max_diff)和总体亮度值(Brightness)特征,共8个[15]。
2)指数特征(VI_Feat):分类基础影像5种指数波段的均值和标准差,共10个。
3)地形特征(DTM_Feat):DSM中的表面高程特征,以及由此获取的表面坡度(Slope)、表面坡向(Aspect)和山体阴影(Hillshade)特征的均值和标准差,共8个。
4)纹理特征(GLCM_Feat):DOM中R、G和B波段和DSM、Slope、Aspect和Hillshade波段各对象全方位灰度共生矩阵(GLCM)的均值、标准差、熵(Ent)、同质度(Homo)、对比度(Const)、非相似性(Dis)、角二阶矩(Ang)和相关性(Corr)特征,共56个。纹理特征中以Mea表示均值,以StD表示标准差。
5)形态特征(SHP_Feat):对象形状和范围特征共18个。
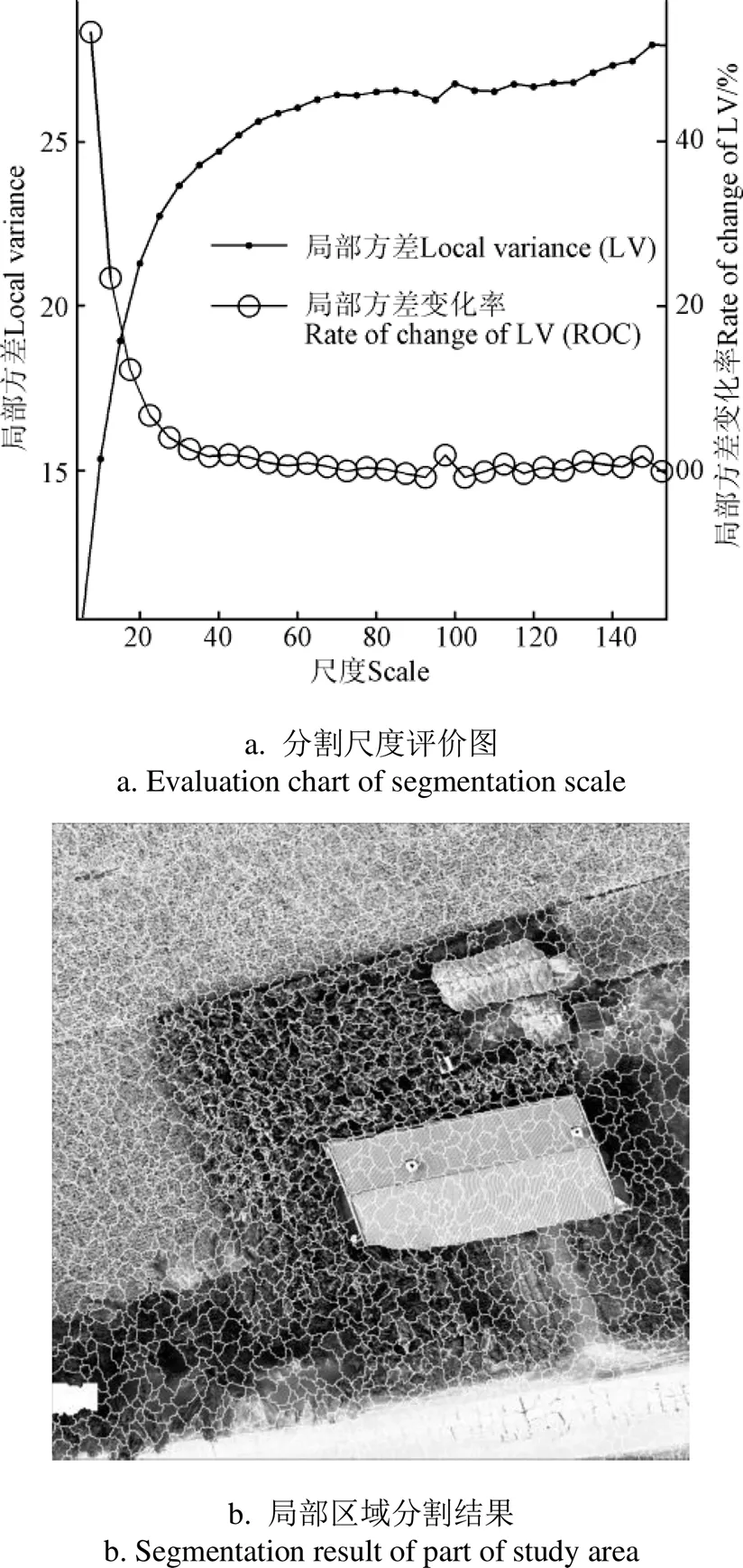
图2 最佳分割尺度及影像分割结果

表2 提取特征列表
2.4 样本选取
随机森林分类效果受样本数量及其分布的制约[14],参考野外照片,依据地物实际分布和概略面积比例,以50为各类别最小样本量,按照表3选取8类地物的样本,将其中60%作为训练样本建立分类模型,剩余40%为测试样本,计算总体精度、Kappa系数、错分误差和漏分误差等指标,评估模型分类精度[27]。

表3 各土地利用类型样本数量
2.5 RF模型参数确定
调用Random Forest语句时需要设置2个重要参数,一个为森林中决策树棵数;另一个为抽取特征数。选用不同的样本和特征类型,最佳的参数取值不同,需通过迭代试验来确定。首先固定生成决策树数目为3000,抽取特征数取遍1和最大值之间的所有整数值分别建模,计算每个模型的OOB误差,OOB取最小值时的值(0)即为最佳参与建模特征数。再令=0,令取遍1到3000的所有整数值,比较模型的OOB误差,选择合适的取值。
为研究不同特征对分类效果的影响,本研究首先设定不同的特征选择方案并筛选子特征集,进行多次分类对比试验。方案1仅选择光谱特征(Spec),方案2在此基础上添加指数特征(Spec+VI),方案3再引入形态特征(Spec+VI+SHP),方案4进一步引入纹理特征(Spec+VI+SHP+DTM),方案5采用全部特征类型(Spec+VI+SHP+DTM+GLCM)。对于所有的特征选择方案做和取值的试验,确定参数取值。各取值对应的OOB误差如图3a和图3b所示。

注:图中方案1~方案5依次表示采用子特征集Spec、Spec+VI、Spec+VI+SHP、Spec+VI+SHP+DTM、Spec+VI+SHP+DTM+GLCM进行分类试验。
图3a表明,随着抽取特征个数增多,各方案的OOB误差取值呈先减小后增大的趋势,对特征选择方案1~方案5,OOB取最小时对应的参数值依次为2、2、8、10和24。当参数大于2 000时,图3b中各方案OOB误差取值趋于稳定,因此将各方案参数取值统一设为2 000。增加选取特征类别时,除采用方案3外,各方案的OOB误差间大体呈减小趋势。采用特征选择方案3时,对于和的绝大多数取值,模型分类精度低于采用方案2的结果。可见部分形态特征对分类起到干扰作用。
2.6 分类特征集优化
采用RF内置的Boruta特征选择算法,按照特征的平均重要程度(MeanImp)指标判断其在分类中的有效性,构建优化特征集(Spec+VI+SHP+DTM+GLCM2)。以优化特征集为基础,分别采用基于最优参数值的随机森林算法(RF)、朴素贝叶斯算法(naive Bayesian, NB)、逻辑回归算法(logistic regression, LR)和支持向量机算法(support vector machine, SVM)分别进行分类,分析不同算法对分类结果的影响。
3 结果与分析
3.1 基于样本的分类结果数据说明
基于最优参数和样本数据分类的总体精度和Kappa系数如表4所示。

表4 不同方案分类精度对比
在采用随机森林算法评估不同特征选择方案时,方案1~方案5的总体分类精度分别为93.72%、97.35%、96.93%、97.77%和98.04%,Kappa系数值分别为0.937、0.973、0.969、0.978和0.980。所有方案分类结果的总体精度都达到90%以上,表明面向对象的随机森林算法是一种有效的分类方法,且分类结果具有较高精度。
将不同的特征依次引入分类特征集时,除引入SHP时外,各分类结果总体精度和Kappa系数呈逐渐增大趋势,采用方案5时分类结果最佳。表明引入多类特征有利于提高分类精度。为明确形态特征的作用,补充进行2次试验,分别采用跳过形态特征直接引入地形特征的方案6(Spec+VI+DTM),以及在此基础上引入纹理特征的方案7(Spec+VI+DTM+GLCM)进行分类。这2种方案的总体精度分别高于与之对应的方案3和方案4,但仍低于方案5,表明分类过程应引入形态特征,不过部分形态特征相当于噪声数据,降低分类结果精度。
在方案5的基础上,采用Boruta算法进行特征选择,共72个特征通过筛选,包括全部的光谱特征、指数特征,7个地形特征,4个形态特征以及43个纹理特征。根据平均重要程度指标,对分类起重要作用的特征依次为光谱特征、指数特征、地形特征、纹理特征和形态特征。
以优化特征集为基础的分类试验中,采用随机森林算法的分类结果最佳,总体精度为98.19%,Kappa系数为0.982,优于其他算法的结果,也优于方案5的分类结果。采用逻辑回归算法、支持向量机算法、朴素贝叶斯算法的总体分类精度分别为90.22%、96.23%和96.79%。在高维分类特征集中,部分特征引起地类间的混淆,通过对特征集的优化和降维,可提高分类精度。然而当优化特征集仍具有较高的维度时,随机森林算法更适合处理高维特征,表现出更好的性能。
不同特征选择方案评估中,各方案不同地类的错分误差和漏分误差分别如图4a和图4b所示。裸地、宅基地的错分误差较大,裸地、道路、水渠、草地的漏分误差较大。
草地主要分布于农田边缘以及道路和水渠两侧的洼地里,所处地势较低,且植株较矮。由于相似的地理位置,当引入地形特征时,草地与水渠、水田之间的混淆增大,错分和漏分误差增大。在影像获取期间,草地、林地和旱地在可见光波段的光谱特征相似,且本研究对各地类以统一尺度进行分割,部分草地和林地形态特征相似;这些因素造成草地、林地和旱地之间的误分。裸地、干涸的水渠以及部分宅基地具有相似的光谱特征,道路与水渠对象具有相似的形态特征,导致水渠、道路、宅基地、裸地之间的误分现象。
若不同地类间特征取值相似,特征取值差异可能由数据噪声决定,实际分类结果受噪声方向和取值的影响。引入多类特征,有利于从多角度描述各地类特点,减小错分和漏分误差。本研究形态特征的低效可能由采用统一的分割尺度造成,在后续研究中,可尝试多尺度分割方式,增强形态特征对类型的描述能力。
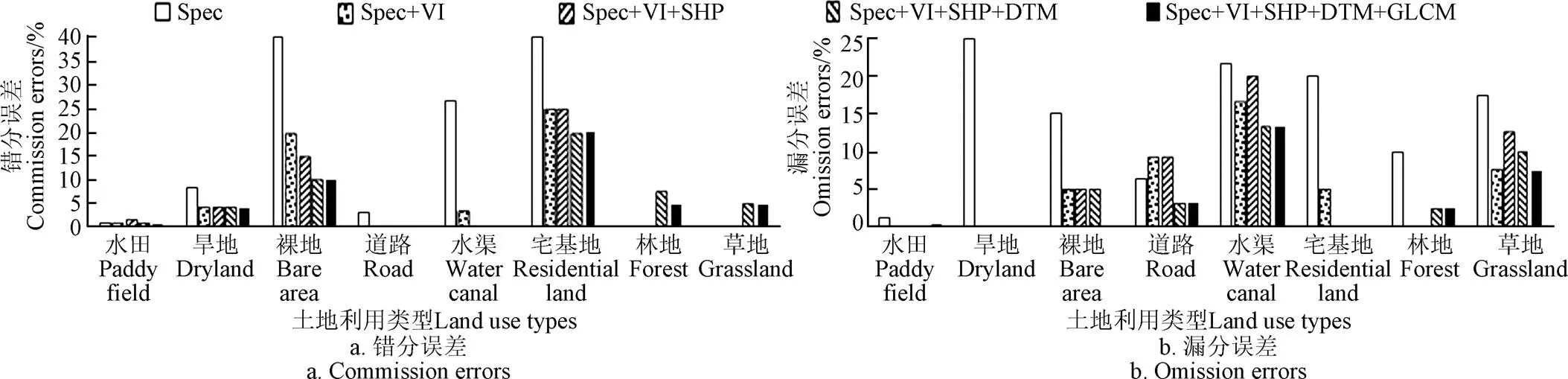
图4 不同特征选择方案错分误差和漏分误差
基于优化特征集,采用不同分类算法进行面向对象分类,各土地利用类型的错分误差和漏分误差分别如图5a和图5b所示。随机森林算法对各个地类的错分误差和漏分误差均较小,逻辑回归算法对于各个地类的分类误差较大。结果进一步验证了随机森林算法对高维特征的性能。

图5 不同分类算法错分误差和漏分误差
3.2 基于区域的分类结果
基于特征选择方案1~方案5分类的区域应用效果如图6所示。仅采用光谱特征进行分类(图6a),水田中也有部分图斑被错分为草地类型,在区域D一带错分情况严重,可能与该区域水田的颜色较绿、较暗,光谱特征取值与草地接近有关。区域B、C和E处较大面积的收割后水田被错分为裸地和水渠。而引入指数特征和形态特征时(图6b和图6c),上述错分现象没有改善,反而在A区域和G区域部分地类被错分为水渠,E区域错分有进一步加剧的现象。基于所有特征类型的方案(图6e)分类时,区域F处仍有部分水田错分为草地,区域C、E处部分水田错分为裸地和水渠。但上述各区域的错分现象有所改善,分类效果最好,所得结果更接近研究区实际情况。

注:字母A~G标记了误分类发生的区域。
基于优化特征集,不同分类算法的区域应用效果如图7所示。采用随机森林算法的分类结果(图7d)更符合实际情况,但仍存在个别区域的错分。采用贝叶斯算法的分类结果(图7a)较好,但在H区域处部分水田被错分为旱地,整体效果较随机森林算法差。其余2种算法均造成大量水田、旱地与林地、草地之间的错分。
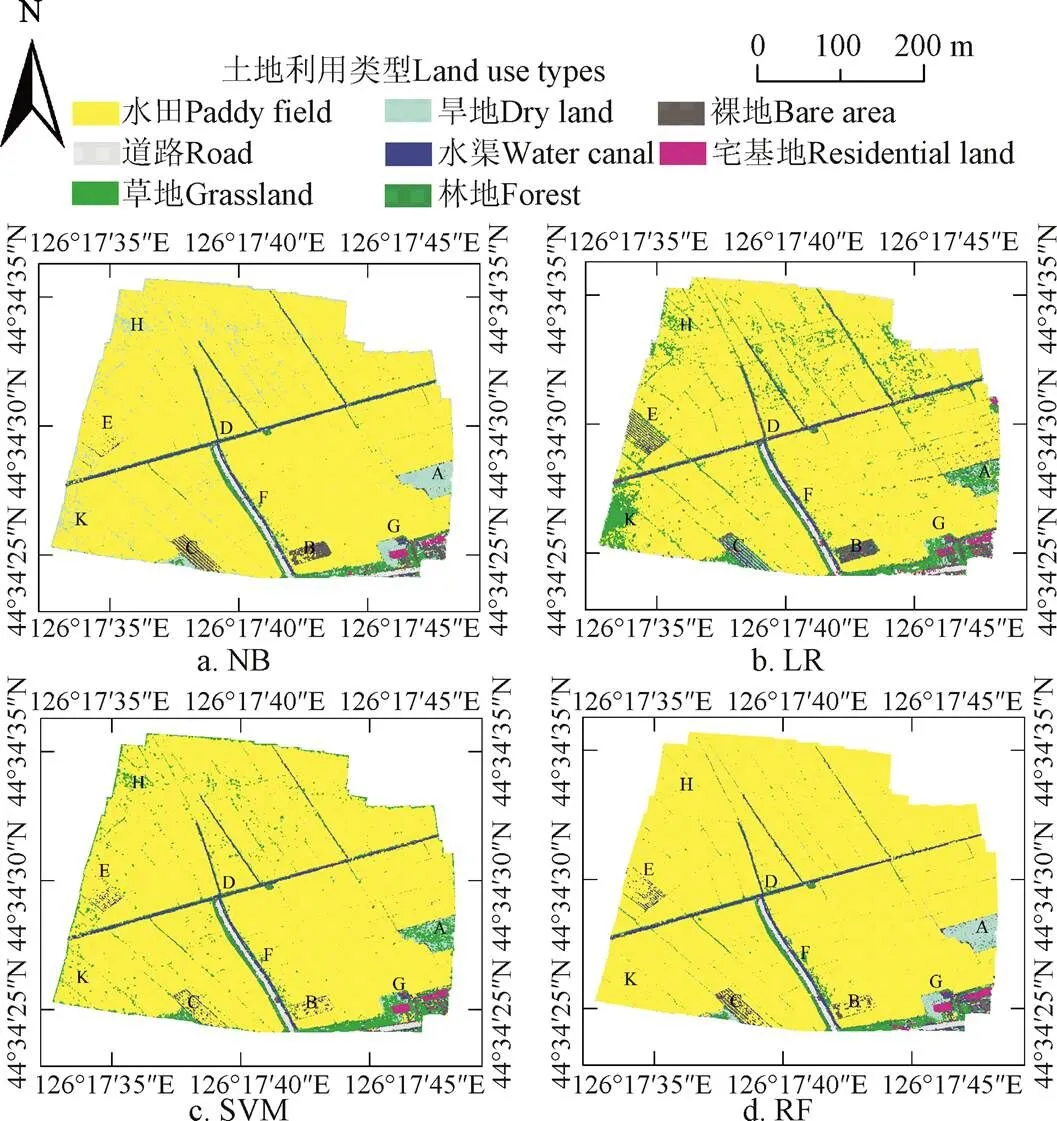
注:字母A~K标记了误分类发生的区域。
区域B、C和E为已收获的水田,包括规则堆放的水稻、水稻割茬和裸土。对于所有分类试验,在区域B和C的水田被大量错分为裸地、水渠,且分类结果并未随特征类型增多而有明显改善。分析其中原因,水稻割茬残留区域光谱特征、形态特征、纹理特征、指数特征与裸地接近,仅以独立的对象为单位提取的特征无法将其与水渠和裸地进行区分。然而它与田中堆放的稻垛相邻,在后续研究中可尝试增加描述其与稻垛对象之间关系的特征对其进行分类。
4 结 论
本研究以吉林省德惠市一农耕区为研究区,借助无人机拍摄影像,提取分类特征,进行面向对象土地利用分类,并分析各类特征、不同算法对分类效果的影响,得到如下结论:
1)随机森林算法更适合处理高维特征。基于无人机低空影像,采用面向对象的随机森林算法可以有效进行研究区土地利用分类,得到较理想的分类结果,分类总体精度达93.72%以上,Kappa系数达0.937以上。
2)基于无人机影像,在数字摄影测量专业软件提取区域DSM,提取地形特征,并将其引入分类特征集,能够辅助土地利用分类并获得更高的分类精度,分类总体精度由96.93%提高到97.77%,Kappa系数由0.969提高到0.978。
3)光谱特征、指数特征、地形特征、纹理特征和形态类型共同参与的分类方法获得的分类精度最高,其中光谱特征、指数特征、地形特征和纹理特征对分类起重要作用,研究区内形态特征为次要特征,部分形态特征在实际分类过程中起到干扰作用。
相关文献研究表明超高空间分辨率的无人机影像具有大量可用的形态及空间关系特征,能够提高分类精度。本研究中,部分形态特征对分类结果却起到了相反的作用,分析原因是由于过高的空间分辨率带来了部分冗余地物信息,仅依赖于常规的分割方法,采用统一参数对区域进行分割,不足以得到最优结果,导致形态特征没有充分发挥作用。后续研究中可进一步调整影像分割方案,提高形态特征的可用性。
[1] 肖艳,姜琦刚,王斌,等. Relief F和PSO混合特征选择的面向对象土地利用分类[J]. 农业工程学报,2016,32(4):211-216.
Xiao Yan, Jiang Qigang, Wang Bin, et al. Object based land-use classification based on hybrid feature selection method of combining Relief F and PSO[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(4): 211-216. (in Chinese with English abstract)
[2] Dronova I. Object-based image analysis in wetland research: A review[J]. Remote Sensing, 2015, 7(5): 6380-6413.
[3] Shruthi R B, Kerle N, Jetten V, et al. Object-based gully system prediction from medium resolution imagery using Random Forests[J]. Geomorphology, 2014, 216: 283-294.
[4] 戴建国,张国顺,郭鹏,等. 基于无人机遥感可见光影像的北疆主要农作物分类方法[J]. 农业工程学报,2018,34(18):122-129.
Dai Jianguo, Zhang Guoshun, Guo Peng, et al. Classification method of main crops in northern Xinjiang based on UAV visible waveband images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 122-129. (in Chinese with English abstract)
[5] 刘斌,史云,吴文斌,等. 基于无人机遥感可见光影像的农作物分类[J]. 中国农业资源与区划,2019,40(8):55-63.
Liu Bin, Shi Yun, Wu Wenbin, et al. Crop classification based on UAV remote sensing images[J]. Chinese Journal of Agricultural Resources and Regional Planning, 2019, 40(8): 55-63. (in Chinese with English abstract)
[6] Zhang Q, Qin R, Huang X, et al. Classification of ultra-high resolution orthophotos combined with DSM using a dual morphological top hat profile[J]. Remote Sensing, 2015, 7(12): 16422-16440.
[7] 耿仁方,付波霖,蔡江涛,等. 基于无人机影像和面向对象随机森林算法的岩溶湿地植被识别方法研究[J]. 地球信息科学学报,2019,21(8):1295-1306.
Geng Renfang, Fu Bolin, Cai Jiangtao, et al. Object-based karst wetland vegetation classification method using unmanned aerial vehicle images and random forest algorithm[J]. Journal of Geo-information Science, 2019, 21(8): 1295-1306. (in Chinese with English abstract)
[8] 冯家莉,刘凯,朱远辉,等. 无人机遥感在红树林资源调查中的应用[J]. 热带地理,2015,35(1):35-42.
Feng Jiali, Liu Kai, Zhu Yuanhui, et al. Application of unmanned aerial vehicles to mangrove resources monitoring[J]. Tropical Geography, 2015, 35(1): 35-42. (in Chinese with English abstract)
[9] 兰玉彬,邓小玲,曾国亮. 无人机农业遥感在农作物病虫草害诊断应用研究进展[J]. 智慧农业,2019,1(2):1-19.
Lan Yubin, Deng Xiaoling, Zeng Guoliang. Advances in diagnosis of crop diseases, pests and weeds by UAV remote sensing[J]. Smart Agriculture, 2019, 1(2): 1-19. (in Chinese with English abstract)
[10] 朱姜蓬,岑海燕,何立文,等. 农情监测多旋翼无人机系统开发及性能评估[J]. 智慧农业,2019,1(1):43-52.
Zhu Jiangpeng, Cen Haiyan, He Liwen, et al. Development and performance evaluation of a multi-rotor unmanned aircraft system for agricultural monitoring[J]. Smart Agriculture, 2019, 1(1): 43-52. (in Chinese with English abstract)
[11] 陆博迪,孟迪文,陆鸣,等. 无人机在重大自然灾害中的应用与探讨[J]. 灾害学,2011,26(4):122-126.
Lu Bodi, Meng Diwen, Lu Ming, et al. Application and exploration of unmanned aerial vehicle in major natural disasters[J]. Journal of Catastrophology, 2011, 26(4): 122-126. (in Chinese with English abstract)
[12] 王晓刚,高飞云,杨磊,等. 无人机遥感技术在自然灾害应急中的应用及前景[J].四川地质学报,2019,39(1):158-163.
Wang Xiaogang, Gao Feiyun, Yang Lei, et al. The application of unmanned aerial vehicle remote sensing technology to natural disaster emergency[J]. Acta Geologica Sichuan, 2019, 39(1): 158-163. (in Chinese with English abstract)
[13] Zhang L, Huang X, Huang B, et al. A pixel shape index coupled with spectral information for classification of high spatial resolution remotely sensed imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(10): 2950-2961.
[14] Millard K, Richardson M. On the importance of training data sample selection in random forest image classification: A case study in peatland ecosystem mapping[J]. Remote Sensing, 2015, 7(7): 8489-8515.
[15] Breiman L. Random forests[J]. Machine Learning, 2001, 45(1): 5-32.
[16] Belgiu M, Drăguţ L. Random forest in remote sensing: A review of applications and future directions[J]. Isprs Journal of Photogrammetry and Remote Sensing, 2016, 114: 24-31.
[17] 马玥,姜琦刚,孟治国,等. 基于随机森林算法的农耕区土地利用分类研究[J]. 农业机械学报,2016,47(1):297-303.
Ma Yue, Jiang Qigang, Meng Zhiguo, et al. Random forest classification of land use in farming area[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 297-303. (in Chinese with English abstract)
[18] 刘舒. 吉林西部湿地分布及NPP时空动态变化研究[D]. 长春:吉林大学,2018.
Liu Shu. Spatial and Temporal Dynamic Changes of Wetland in the West of Jilin Province and its NPP[D]. Changchun: Jilin University, 2018. (in Chinese with English abstract)
[19] Yao H, Qin R, Chen X. Unmanned aerial vehicle for remote sensing applications: A review[J]. Remote Sensing, 2019, 11(12): 1443.
[20] 刘凯,龚辉,曹晶晶,等. 基于多类型无人机数据的红树林遥感分类对比[J]. 热带地理,2019,39(4):492-501.
Liu Kai, Gong Hui, Cao Jingjing, et.al. Comparison of mangrove remote sensing classification based on multi-type UAV data[J]. Tropical Geography, 2019, 39 (4): 492-501. (in Chinese with English abstract)
[21] 刘斌. 基于无人机遥感影像的农作物分类研究[D]. 北京:中国农业科学院,2019.
Liu Bin. Classification of Crops Based on UAV Remote Sensing Images[D]. Beijing: Chinese Academy of Agricultural Sciences Dissertation, 2019. (in Chinese with English abstract)
[22] 淮贺举,李存军,李奇峰,等. 东北地区春玉米物候期时空动态变化特征[J]. 玉米科学,2019,27(1):85-90.
Huai Heju, Li Cunjun, Li Qifeng, et. al. Changes of spring maize phenology from 1981 to 2012 in the northeast plain of China[J]. Journal of Maize Sciences, 2019, 27(1): 85-90. (in Chinese with English abstract)
[23] 中华人民共和国国家标准GB/T 21010-2017,土地利用现状分类[S]. 北京:中国标准出版社,2017.
[24] 李广. 基于无人机遥感技术的玉米种植分布信息提取方法研究[D]. 杨凌:西北农林科技大学,2016.
Li Guang. Research on the Extraction Method of Maize Planting Distribution Information Based on the UAV Remote Sensing System[D]. Yangling: Northwest A&F University, 2016. (in Chinese with English abstract).
[25] Drăguţ L, Tiede D, Levick S R. ESP: A tool to estimate scale parameters for multiresolution image segmentation of remotely sensed data[J]. International Journal of Geographical Information Science, 2010, 24(6): 859-871.
[26] 井然,邓磊,赵文吉,等. 基于可见光植被指数的面向对象湿地水生植被提取方法[J]. 应用生态学报,2016,27(5):1427-1436.
Jing Ran, Deng Lei, Zhao Wenji, et al. Object-oriented aquatic vegetation extracting approach based on visible vegetation indices[J]. Chinese Journal of Applied Ecology, 2016, 27(5): 1427-1436. (in Chinese with English abstract)
[27] 刘舒,姜琦刚,马玥,等. 基于多目标遗传随机森林特征选择的面向对象湿地分类[J]. 农业机械学报,2017,48(1):119-127.
Liu Shu, Jiang Qigang, Ma Yue, et. al. Object-oriented wetland classification based on hybrid feature selection method combining with Relief F, multi-objective genetic algorithm and random forest[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 119-127. (in Chinese with English abstract)
Object-oriented land use classification based on ultra-high resolution images taken by unmanned aerial vehicle
Liu Shu1, Zhu Hang2※
(1.,,130118,; 2.,,130022,)
Unmanned aerial vehicle (UAV) has been increasingly used to aid agricultural production and land management, and this paper investigates the feasibility of using ultra-high resolution UAV images to differentiate land usage. We took a farmland at Dehui of Jilin province as an example and acquired its UAV images. The digital surface model (DSM) and the digital orthophoto map (DOM) of the region was generated using the digital photogrammetry software. We then calculated the regional terrain factors and the vegetation indices, and combined them with the original orthophoto model to construct the baseline images for land use classification. The tool of estimation of scale parameters (ESP) was used to extract the optimal scale for segmentation, and a level of objects was constructed after processing the multi-scale segmentation based on the optimal value of each parameter. Terrain and morphological features of each object was used for the classification. It included two steps. The first one was to perform an object-oriented classification of all the five features based on the random forest algorithm. We used a five-feature classifications to analyze the impact of different features. The first one only used the spectrum feature to classify and the index features, morphological features, terrain features and textural features were added consecutively for further classification. The overall accuracy, kappa coefficient, the omission errors and the commission errors for each feature were compared. In the second step, Boruta feature selection method was applied to the original feature space to obtain an optimal feature subset. Based on the optimal feature subset, land use classification was conducted using the random forest algorithm, naive Bayesian algorithm, logistic regression method and the support vector machine (SVM). Using the same optimal feature subset, the influence of each method on the classification was tested. The results showed that the accuracy of the five feature selection schemes was 93.72%, 97.35%, 96.93%, 97.77%, and 98.04% respectively. Adding morphological features reduced accuracy, while adding other features improved accuracy. The scheme with five features gave the best result. The commission was mainly between the bare land and residential land, and the omissions were mainly among grassland, water canals and roads. The confusion between them was likely to be caused by the similarity of spectral, morphology, textural properties and their similar positions. In this study, the important features for classification were spectrum features, textural features, index features and terrain features, and the least important features were morphological features. There were 72 features passing the Boruta test and forming the optimal feature subset. Based on this feature space, the overall accuracy with the above four different algorithms was 98.19%, 96.79%, 90.22% and 96.23% respectively. The classification using the random forest algorithm gave the best result. In conclusion, adding the terrain features can assist classification of land coverage and improve accuracy. Compared with other algorithms, the random forest algorithm is most robust in classification of land coverage in using high dimensional feature space.
remote sensing; land use type; images taken by UAV; object-oriented; feature selection scheme; random forest
刘 舒,朱 航. 基于超高空间分辩率无人机影像的面向对象土地利用分类方法[J]. 农业工程学报,2020,36(2):87-94.doi:10.11975/j.issn.1002-6819.2020.02.011 http://www.tcsae.org
Liu Shu, Zhu Hang. Object-oriented land use classification based on ultra-high resolution images taken by unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(2): 87-94. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.02.011 http://www.tcsae.org
2019-09-25
2020-01-07
国家重点研发计划项目(2016YFD0200701)
刘 舒,讲师,博士,主要从事遥感地学和环境遥感研究。Email:liushu8877@126.com
朱 航,副教授,从事航空遥感及多源信息融合技术研究。Email:hangzhu@jlu.edu.cn
10.11975/j.issn.1002-6819.2020.02.011
TP79
A
1002-6819(2020)-02-0087-08
