基于滑模观测器的永磁同步电机无位置传感器控制研究
2020-11-27颜伟平
余 鑫,王 兵,刘 凯,颜伟平,陈 瀚
(1.湖南工业大学 电气与信息工程学院,湖南 株洲 412007;2.湖南工业大学 电传动控制与智能装备湖南省重点实验室,湖南 株洲 412007)
1 研究背景
内置式永磁同步电机(interior permanent magnet synchronous motor,IPMSM),具有功率密度较高、结构较为简单、响应速度较快等特点,被广泛地应用于电动汽车、航空航天以及工业制造等领域中[1]。为了能够获得良好的控制性能,同步电机需要获取精确的转子位置。编码器、旋转变压器等机械式传感器是转速闭环控制系统的重要组成部分,它们虽然可以获得转子位置信息,但是存在运行成本较高、控制精度较低、可靠性较差等问题。
已有研究表明,永磁同步电机的无位置传感器控制技术可以省略机械式传感器,简化系统结构,降低系统成本,提高系统的可靠性[2]。永磁同步电机的无位置传感器的控制策略通常可分为如下两种:一种是低速或者零速环境下,利用永磁同步电机的“凸极”特性获取转子位置;另一种是在中高速环境下,通过电机基波激励模型中和转速有关的量来提取转子的位置信息[3]。中高速的运行控制方法主要有磁链估算法[4]、模型参考自适应法[5]、卡尔曼滤波法[6]、滑模观测器法[7-8]。文献[9]采用分段指数型函数设计滑模观测器,其仿真结果表明,该观测器能削弱系统抖振,抑制转矩脉动。文献[10]采用连续函数作为控制函数,将低通滤波器改进为具有自适应结构的反电动势观测器,结果发现该方法提高了转子位置估算的精度。文献[11]采用双滤波器串联的方式来提取反电动势信息,仿真结果证实其可以实时测得在不同转速下的滤波器相移,可将其用于角度补偿。文献[12]设计了一种基于反电动势模型的正交锁相环转子位置观测器,其采用对反电动势归一化的正交锁相环来获得转子位置信息,以降低噪声的影响,并且采用极点配置方式设计了观测器参数,有效减小了位置观测误差。文献[13]针对传统滑模观测器的抖动、滤波器延时等问题,用S 型函数替代传统符号的开关函数,加快了系统的响应速度,但是观测器误差在滑模面上不一定收敛到0,这会导致收敛精度和跟踪速度降低。文献[14]基于同步旋转坐标系下建立了非奇异快速终端滑模观测器,并通过非线性跟踪微分器获得平滑的d-q轴反电势,结合锁相环提取转子位置信息,这不仅改善了传统滑模观测器的相位滞后问题,还提高了系统的动态响应速度。
本文拟基于d-q坐标系下建立改进型滑模观测器实现IPMSM 的无位置传感器控制。为抑制滑模产生的抖振并且提高位置的估算精度,利用饱和函数替代传统的开关函数;并针对传统锁相环的相位滞后问题,在旋转两相坐标系下,通过单相锁相环提取转子的位置信息;为了简化系统运算、降低计算噪声,采用前向差分运算替代微分运算;为了提高系统的抗干扰能力和响应速度,采用滑模速度控制器替代传统的PI 控制。最后,利用Matlab/Simulink 软件搭建了仿真模型[15],所得仿真结果表明:在中高速运行时,所提出的方法较传统滑模观测器系统抖振问题得到了极大改善,转子位置检测精度更高,系统超调量更小,系统的稳定性能更好。
2 IPMSM 数学模型
IPMSM 在两相静止坐标系(α-β)下的数学模型如下:

式中:Ld、Lq为d-q坐标系下的定子电感;
[uαuβ]T为α-β坐标系下的定子电压;
[iαiβ]T为α-β坐标系下的定子电流;
R为定子绕组;
ωe为电角速度;
p为微分算子;
[EαEβ]T为扩展电动势,且满足

其中,θe为转子位置,ψf为永磁体磁链。
当电机定子电流变化较大时,会引起反电动势的变化,永磁同步电机的扩展反电动势包含了转子位置和速度信息,为了准确地观测扩展反电动势估算转子位置,将式(1)改写为如下电流状态方程:

3 滑模观测器设计
3.1 传统滑模观测器设计
在α-β坐标系下设计如下传统滑模观测器:

传统的滑模观测器采用如下开关函数设计控制策略:
式中k为滑模增益。
由式(3)减去式(4),可以得出如下电流的误差方程:
定义滑模切换函数如下:


由估算的扩展反电动势值,通过反正切函数,可以得到转子位置的估算值:

滑模实际控制的是一个离散的高频切换信号,传统的观测器采用开关函数,其切换时产生的高频信号用低通滤波器滤除。这种方法在一定程度上减小了系统抖振,但是同时会造成扩展反电动势的相位滞后,需要加上相位补偿环节来提高估算的准确性,因而大大增加了系统的复杂性,且繁琐的运算会产生较大的计算噪声。
3.2 改进型滑模观测器设计
利用park变换,将式(1)改写为如下IPMSM在d-q坐标系下的定子电流方程:

定义Ed、Eq为电机在d-q坐标系下的等效反电动势,且Ed=0,Eq=ωeψf,其中ψf为永磁体磁链。在d-q坐标系下设计如下改进型滑模观测器:
式中:ud、uq为d-q坐标系下的定子电压;
采用滑模观测器估算电流值,定义滑模面的切换函数为
常规方法:给予患儿抗感染、抗炎症、化痰止咳等药物口服,同时予吸入用布地奈德空气压缩雾化吸入,使药物更快到达发病部位,从而快速发挥作用。
设计改进型滑模观测器控制律为

式中k为滑模增益。
基于开关函数的传统滑模控制器的抖振较大,利用低通滤波器可以滤除产生抖振的高频信号,再采用反正切函数和相位补偿可以提高精确度,但补偿角度受截止频率影响较大,且控制系统过于复杂。而采用饱和函数可简化系统结构,无需再经滤波处理即可得到反电动势,因此改进型滑模观测器采用饱和函数sat( )替代传统开关函数sign( ):
式中:L为电流误差边界;
μ为饱和函数系数,且满足μ=1/L。
在饱和层外采用开关切换控制,饱和层内采用线性控制,这样,既可以保证收敛速度,又可以减小高频切换时带来的抖振,且在中低速场合也能有较好的跟踪性能。图1为饱和函数示意图。
图1 饱和函数示意图Fig.1 Saturation function schematic diagram
由式(11)减去式(10),可得定子电流误差状态方程的向量形式为


Ts为采样时间,


3.3 系统稳定性验证
为验证系统稳定性,定义李雅普诺夫函数为

根据李雅普诺夫函数的稳定性判据,系统进入滑模面应满足如下条件:

由式(19)(20)可得滑模观测器到达滑模面的条件为
可得出滑模增益k的取值范围为
式(22)表明,满足滑模可达性后,系统中运动的点可以在有限时间内趋近滑模面,系统开始启动滑模运动。
4 基于单相锁相环的转子位置检测
永磁同步电机的永磁体磁链在电机运行过程中不是一个定值,对电机转速和位置的估算会产生误差,而且采用滑模控制在滑动模态下会产生高频抖振,影响位置估计的准确性。因此,本研究采用单相锁相环(single-phase locked loop,SPLL)来获取转子的转速和位置信息,以减小误差。
单相锁相环是一种自适应闭环系统,在谐波较大时仍然可以实时跟踪和估算转子位置。当系统进入滑动模态时,由式(15)可得:

将Vd输入单相锁相环中与参考值作比较,得到误差信号,通过PI 调节器实现闭环控制,可获得转子电角速度的估算值,再对求积分得到转子相位估算值。锁相环包括鉴相器、环路滤波器、压控振荡器,基于PI 调节器的单相锁相环的闭环控制框图如图2所示。

图2 单相锁相环结构框图Fig.2 Single-phase locked loop block diagram
鉴相器是一个比较环节,其将估算值与实际值进行比较,得到误差信号,再经过环路滤波器滤除噪声信号,然后将信号输入压控振荡器。当滤除的噪声信号为高频信号时,可用低通滤波器替代环路滤波器,采用一阶比例积分环路滤波器的传递函数为

式中:γp为比例系数;
γi为积分系数;
Uh为环路滤波器输出电压;
Uj为鉴相器输出电压。
在单相锁相环电路中,压控振荡器输出值为电角速度估算值,采用积分环节将电角速度估算值转换为相位估算值。单相锁相环系统的传递函数为

式中:Kp为鉴相器增益;
Kν为压控振荡器的增益。
将传递函数归一化为

式中:ζ为系统阻尼系数,且;
ω0为系统的自然振荡频率,且。
单相锁相环经过鉴相器后得到误差信号,通过环路滤波器将高频噪声信号滤除,再经过压控振荡器后输出电角速度估计值,最后通过积分作用得到转子位置相位角估计值,经过负反馈调节使相位角估计值与实际值相位同步,实现相位锁定。
5 基于趋近律设计的滑模速度控制器
永磁同步电机速度控制通常采用PI 控制,虽然参数调节简单,但是因受外界干扰影响较大,鲁棒性较差,为增强系统稳定性,本研究采用滑模控制器(sliding mode controller,SMC)替代PI 控制。电压和电流信号经过滑模观测器和单相锁相环后得到转速估算值。将估算值与转速参考值nr*进行比较,得到转速误差。再将转速误差转换为机械角速度误差信号,输入滑模控制器中,通过滑模控制器调节得到q轴电流给定值。
在d-q坐标系下重写电机运动方程:

式中:TL为负载转矩;
B为阻尼系数;
pn为电机的极对数。
滑模速度控制器的系统误差函数及其导数为

式中:为机械角速度参考值;
设计的滑模面函数为
式中c为待定参数。
对滑模面函数求导,可得:

为消除系统稳态误差,采用指数趋近律法;为削弱系统抖振,采用饱和函数作为滑模切换函数:

由式(28)(30)(31),可得q轴电流参考值的表达式如下:

式中参数c、δ、ε均大于0。
当s接近于0 时,系统趋近速度为ε,满足滑模可达性。为了加快趋近时间,减小系统抖振,可以适当减小ε并且增大δ。滑模速度控制器与传统PI 控制相比,不仅加快了系统的响应速度,而且消除了系统的稳态误差。
6 仿真模型与验证
6.1 仿真模型
通过Matlab/Simulink 仿真软件,采用id=0 的控制方式,并且在传统的滑模观测器中,PI 控制环节参数设定为kp=20,ki=800;在改进的滑模速度控制器中,参数设定为δ=250,c=30,ε=200;在锁相环系统中,参数设定为γp=20,γi=1 500;饱和函数上下限为[-2,2],改进型滑模观测器的滑模增益k=300。搭建的改进型滑模观测器的IPMSM 的仿真模型控制框图如图3所示。

图3 改进型滑模观测器的IPMSM 控制框图Fig.3 IPMSM control block diagram of the improved sliding mode observer
电机参数设置如表1所示。
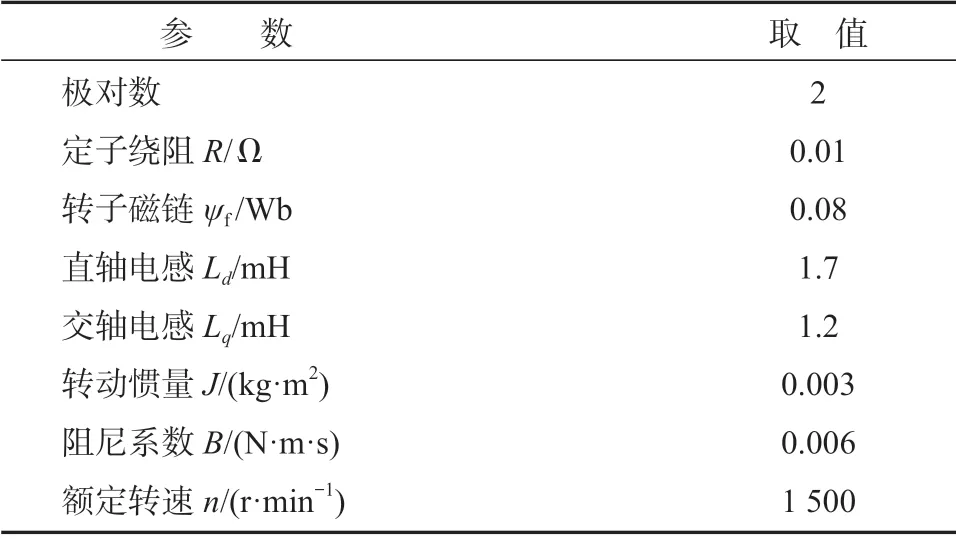
表1 IPMSM 参数Table 1 IPMSM parameters
6.2 仿真分析
6.2.1 转速突变分析
为了验证中高速转速范围内改进型滑模观测器的位置估算性能,在空载条件下,给定初始的转速为1 000 r/min,在运行至0.5 s 时,将转速突然增大到1 200 r/min,设置仿真时间为1 s。得到的传统滑模观测器和改进型滑模观测器的仿真结果对比如图4~6所示。

图4 滑模观测器速度突变时实际转速与估算转速仿真结果Fig.4 Simulation results of actual speed and estimated speed in sliding mode observer with sudden changes of speed

图5 滑模观测器速度突变时转速估算误差仿真结果Fig.5 Simulation results of speed estimation error in sliding mode observer with sudden changes of speed
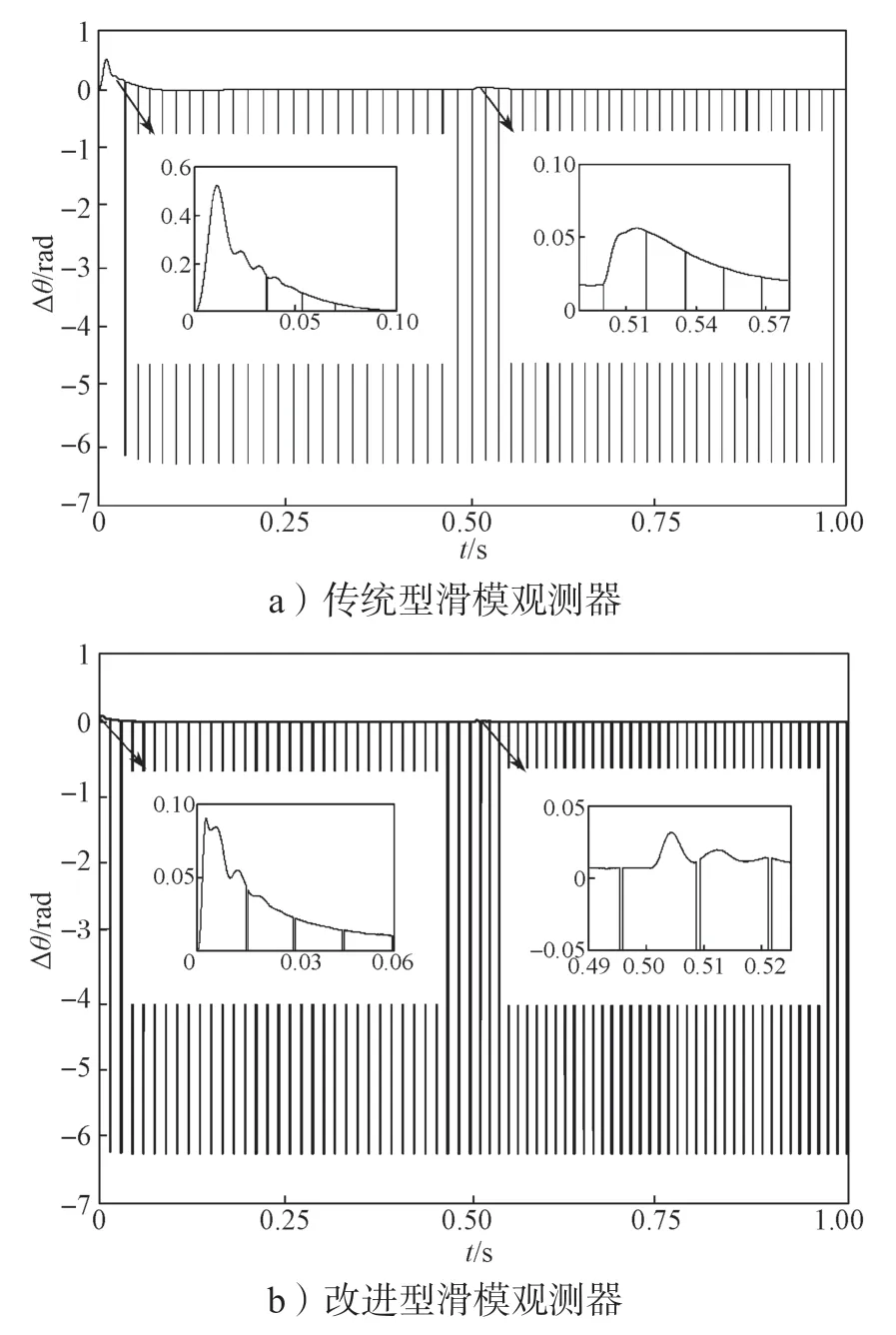
图6 滑模观测器速度突变时转子位置估算误差仿真结果Fig.6 Simulation results of rotor position estimation error in sliding mode observer with sudden changes of speed
由图4和图5可以得知,传统滑模观测器的转速跟踪误差较大,在转速突变时,其转速估算误差超过了120 r/min;稳定运行时,转速误差波动较大,最大达到了140 r/min;而改进型滑模观测器的转速跟踪误差相对较小,在转速突变时,转速估算误差不超过9 r/min,稳定运行时转速误差不超过1 r/min。由图6可知,传统型滑模观测器转子位置在初始阶段存在明显的相位滞后,达0.53 rad,0.08 s 后达到稳定;在转速突变时,相位误差达0.06 rad,0.07 s 后恢复稳定,稳定运行时相位误差达0.02 rad。改进型滑模观测器的初始阶段转子位置相位误差为0.09 rad,0.05 s 时稳定;在转速突变时,相位误差为0.035 rad,0.02 s 后恢复稳定,稳定运行时的相位误差不超过0.01 rad。改进型滑模观测器改善了位置估算的初始相位滞后问题,在应对转速突变时动态误差更小,响应速度更快,鲁棒性更好。
6.2.2 负载转矩突变分析
给定电机转速为1 200 r/min,在0.5 s 时负载转矩突变为5 N·m,得到传统滑模观测器和改进型滑模观测器的仿真结果对比,如图7~9 所示。

图7 滑模观测器负载转矩突变时实际转速与估算转速仿真结果Fig.7 Simulation results of actual speed and estimated speed in sliding mode observer with sudden changes of load torque

图8 滑模观测器负载转矩突变时转速估算误差仿真结果Fig.8 Simulation results of speed estimation error in sliding mode observer with sudden changes of load torque
由图7和图8可以得知,传统滑模观测器的转速跟踪误差较大,在负载转矩突变时,其转速估算误差最高,达到了170 r/min;稳定运行时的转速误差波动较大,最高达150 r/min。改进型滑模观测器的转速跟踪误差相对较小,在负载转矩突变时,其转速估算误差不超过11 r/min;稳定运行时,其转速误差不超过1 r/min。


图9 滑模观测器负载转矩突变时转子位置估算误差仿真结果Fig.9 Simulation results of rotor position estimation error in sliding mode observer with load torque changes suddenly
由图9可以得知,传统型滑模观测器的转子位置在初始阶段存在明显的相位滞后,高达0.58 rad,0.08 s 后稳定,在负载转矩突变时,其相位误差达0.03 rad,0.06 s 后恢复稳定,稳定运行时的相位误差超过了0.02 rad;改进型滑模观测器初始阶段的转子位置相位误差为0.09 rad,0.04 s 后达到稳定,在负载转矩突变时,相位误差不超过0.01 rad,0.01 s 后恢复稳定,稳定运行时,其相位误差不超过0.01 rad。可见,改进型滑模观测器应对负载突变的情况时,响应速度更快,动态误差更小。
7 结论
本文基于d-q坐标系下,利用饱和函数建立了改进型滑模观测器,可得出如下结论:
1)以改进型滑模观测器替代传统的滑模观测器,可以有效减小传统滑模观测器开关函数产生的抖振现象;
2)在位置检测中采用单相锁相环技术替代传统的锁相环,省去了相位补偿环节,因而可以提高位置估算精度;
3)采用基于趋近律的滑模速度控制器替代PI 控制,可提高系统响应速度和抗干扰能力。
通过Matlab/Simulink 仿真平台进行仿真验证,在中高速运行条件下,与传统滑模观测器相比,改进型滑模观测器削弱了系统抖振、减小了超调、提高了转子位置估算的准确性,且在转速或者负载突变的情况下也具有良好的稳定性。
