结合贝叶斯最优分类器和目标图形监测的健美操自动评分系统
2020-11-26赵锡华
赵锡华
(黎明职业大学 通识教育学院,福建 泉州 362000)
0 引言
在我国经济快速发展的背景下,人们的工作时长与压力不断变大,根据网络调查数据显示,我国目前有43%的人在办公室至少坐8 h,“久坐”已经成为导致各类疾病的重要诱因.世界卫生组织指出,现代工作人群可以采用慢跑、健美操等方式解决工作中因久坐导致的姿态不良问题.吴学文[1](2019)提出,随着城市空间利用率的不断提升,公众进行慢跑的空间逐渐压缩,而健美操动作简单易学、场地要求更低,因此更能够帮助民众解决个人锻炼需求,提升居民身体素质.以往的健美操运动中进行目标图形监测的相关研究集中在两个维度,其一是针对健美操运动中足迹图像的相关研究,其二是针对各类运动中的自动评分技术进行研究.在关于足迹图像识别的相关研究中,杨姝等[2](2004)提出了基于灰度-梯度二维阈值向量区域分割的边缘提取方法,构造两个适合足迹图像特点的结构元算子,对区域分割后的二值图像作数学形态学运算,进而实现对足迹图像边缘的处理.李志双[3](2017)提出了基于贝叶斯理论的健美操运动中人体足迹图像识别方法,将人体足迹图像轮廓深度区域切分为多个不相重叠的小模块,进而结合EM理论对获得的特征函数进行聚类分析,得到健美操运动过程中不同阶段的人体足迹图像特征.足迹图像能够有效体现健美操的难度系数,上述模型的稳健性也能够通过压力监测,但足迹图像无法反映运动员整体动作的问题始终存在,因此采用足迹图像技术仅能说明健美操难度系数,而无法印证运动员的完成水平.针对自动评分技术,当前的研究往往从动作视频的三维提取角度展开.魏娟丽等[4](2006)认为,基于视频的人体运动分析通过对人体的运动轨迹以及各运动学和动力学参数,达到分析人体三维运动的目的,该分析方法具有较大的实践价值和应用场景.
总体而言,基于足迹图像的模型稳健性较强,但全面性较差,无法有效刻画运动员整体姿态和表现;基于三维视频建模的系统全面性较好,但系统稳健性较差,整体评分精度不稳定.为了解决上述问题,研究将提出新型的健美操自动评分系统.
1 目标图形监测系统设计
目标图形监测识别系统用于实时监测目标的健美操动作,基于可穿戴设备理论,研究摒弃了传统的视频拍摄方案,采用若干传感器组合实现对运动员躯干姿态、关节压力和动作时间的采集,再通过单片机对上述采集信息进行结合,构成人体各个部位的空间坐标,利用朴素贝叶斯分类器分析当前健美操动作与最佳健美操动作的差距,根据教练员设定的完成精度进行计分[5].
1.1 硬件系统设计
通过分析健美操自动评分系统的功能需求,设计了由微控制单元(MCU)控制系统、躯干姿态系统、关节压力系统、高度测距系统、用户界面、计分系统组成的硬件系统,系统框架如图1所示.
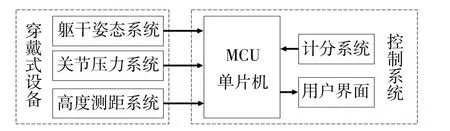
图1 硬件系统设计
1.1.1 控制系统
健美操自动评分系统需要完成两个核心功能:一是实时检测健美操运动员当前躯干姿态,识别各个关节力度,判定运动员水平位置,进而实现动作空间坐标的计算;二是将计算数据与标准动作的数据进行比对,判断当前动作是否达到标准,进而实施计分.由于计算量较大,需要选择运算能力较强的中央处理器进行运算,故研究采用了STM32系列的单片机作为系统MCU.该系列单片机由意法半导体推出,具有核心频率高、运算速度快、功耗超低、易于编程的特点,能够满足系统的需求.
教练员通过用户界面设定60%~90%的完成精度,通过与MCU的交互,实现对运动员评分标准的设定,并通过用户界面的显示器实时观察计分情况.在一整套健美操完成后,针对各个动作是否达成标准阈值,MCU进行总体求和,进而得到健美操运动员的最终得分,发送到显示屏上,由教练员记录运动员的最终评分情况.
1.1.2 躯干姿态系统
通过躯干姿态系统对健美操动作进行测量,研究采用了倾角传感器对运动员各个躯干间的角度进行评估.一般而言,一套健美操运动可以由若干个基础动作组合而成,因此每个标准基础动作中,人体躯干各个部分(头部、肩部、肘部、腿部、脚部)将会呈现固定的倾角,并维持一定时间,运动员在对应时间点各个躯干间的倾角不足或倾角过高,就证明动作完成并不标准,因此可以通过倾角传感器考察运动员的动作标准程度.但需要注意的是,尽管研究采用的ACC375三轴倾角传感器是目前测量最为精确的传感器,但也仅限于准静态测量场景,而健美操动作切换过程中,由于躯干的快速运动,将会造成外界加速度,那么倾角传感器中的“液体摆”会剧烈动荡,造成测试结果的不准确.对此,本研究借鉴业界常用做法,加设3轴MEMS加速计和3轴陀螺仪,并采用优先的卡尔曼滤波算法,构成了6轴加速度矢量控制器(VG),以减少z轴的漂移情况,避免倾角测量的不准确.
1.1.3 关节压力系统
关节压力系统主要测试运动员部分动作的发力情况.运动员的躯干姿态倾角能够说明运动员健美操动作是否标准,但从健美操评分角度来看,标准的动作往往不是具备“美感”的动作,许多运动员在长期练习过程中能够很好地控制整体姿态,但各个动作缺乏力道,就会使得动作衔接不流畅,整体表现“绵软无力”,这样的健美操无疑是低分的健美操.为此,研究进一步采用关节压力系统分析运动员的力道表现,考虑到压力系统需要设置于关节之上,因此需要柔韧性较强、形变范围较大的传感器,研究采用了A401型薄膜压力传感器.该传感器由Tekscan公司推出,具有柔韧性强、灵敏性高、动态测试准确的特性,适合本项目的目标图形监测设计.
1.1.4 高度测距系统
根据健美操动作类别的分配,运动员在一整套健美操动作中可能出现三类动作,分别为静态型动作、跑动型动作和跳跃型动作,静态型动作主要考察头部、手部与腿部的相对位置,大约需要5个传感器,如图2所示,图中黑点即为传感器;而跑动型动作需要进一步考察左右手肘和膝部关节的相对位置,因此需要添加4个传感器(即关节压力系统),达到9个传感器;在跳跃型动作中,还需要考察腰部离地位置,从而分析跳跃高度,因此还需要添加一个高度测距系统.对于健美操运动员而言,对其动作进行评分时,腰部处于整体视觉的中心,因此用腰部离地位置作为评估离地水平的距离相对科学.其次,通过对跳跃离地水平的分析,可以考察健美操整体“框架”(英文文献称:Balance)的表现力,进而评估运动员动作活跃性.这里使用了PLS-Z-5型单点TOF激光测距模块,该模块精度较高,光源安全,适合市内距离测量.总的来看,运动员需要佩戴由10个传感器所构成的可穿戴设备,由传感器将运动员动作中的角度、力度和高度数据传递至MCU中,由单片机将相关数据与标准数据进行对比,再进行评分.
1.2 软件流程设计
教练员通过用户界面的液晶屏幕,将该套健美操的标准动作相关数据输入单片机,并设置该套健美操音乐的总时间和拍数,系统自动计算出每个动作的切换时间(例如健美操为每分钟120拍,那么每拍为0.5 s,各拍对应一个动作).系统实时比对当前动作与标准动作的区别,判定躯干姿态、关节压力和高度测距三方面是否达到动作要求,系统的软件流程如图3所示.
2 动作识别算法
即使是最优秀的健美操运动员,也无法做到各个动作的倾角、压力和高度完全符合标准动作的要求,而且对于MCU而言,所接收的运动员当前动作是无法预计的,即未知动作.因此需要采用概率论或模糊数学的方法,提高对当前动作的判例可能性,进而提高系统的评价精度.针对当前动作的识别算法,研究采用了朴素贝叶斯最优分类器.借鉴贝叶斯定理预测运动员各种未知动作属于最优动作的可能性,并选择已知动作(标准动作)中可能性最大的一个动作作为当前的动作类别.下面介绍算法的基本思想.
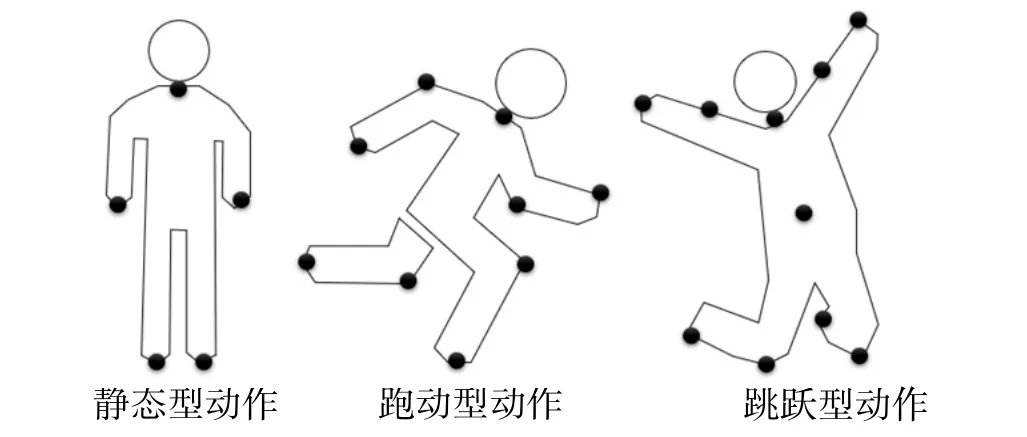
图2 健美操运动员可穿戴设备的传感器位置

图3 健美操计分系统流程图
假设存在10个类别的数据集合C:{c1,c2,…,c10},分别代表一套健美操中总共应该出现的10个标准动作.对采集躯干姿态数据的倾角传感器而言,根据图2可知,总共设置了5个倾角传感器,每个传感器会产生x,y,z轴的3个倾角数据,将上述15个倾角数据写成一个数列,就构成了一个未知类归属样本,这里记为X:{x1,x2,…,x15}.对正在进行健美操运动的运动员而言,传感器所采取的倾角数据是连续的,其分布概率形式也无法估计(不同健美操的动作设置不一致),假设采用概率密度统一描述,就会造成估计值与真实分布的差距,进而产生错误的估计结果.倾角传感器中总共能够产生-180°~180°(共计360°)的测量区间,因此以30°作为最小区间,就可以得到12个均匀的分布区间,进而把上述样本离散化(程序中直接将测量倾角数据除以30).根据贝叶斯定理可知:

根据有限样本进行训练所得的数据,就可以通过贝叶斯定理得到其先验概率P(c|X),依据条件同分布假设,即每个指标独立地对分类标准产生影响,(1)式可以改写为:

在真实的应用过程中,倾角传感器也可能监测到训练集中从未出现过的值,这是由于大规模的应用过程中,总会出现运动员动作非常不到位的情况.这类值在训练估计中的概率为0,就可能导致贝叶斯分类器的质量下降,为了修正这一情况,可以采用拉普拉斯平滑方法对(2)式的先验概率P(xi|c)进行调整:

(3)式中,nxi代表训练集合中i类倾角值出现次数,nc代表训练集中该类健美操基础动作出现的次数,N代表训练集所使用的样本数量.通过朴素贝叶斯最优分类器,就可以在类先验概率P(c)的基础上,预先建立各个倾角与最优动作的联系,进而计算得到健美操动作X属于何类动作的概率,通过后验数据实时将各种健美操动作进行归类,从而进行动作识别.
这里需要说明的是,根据动作设置精度的不同(研究设定为60%~90%,每10%一个档次),运动员健美操动作完成度的归类情况是不一样的.举例而言,在60%的设置精度下,要求运动员在健美操中手臂与躯干呈45°倾角,那么运动员实现45°±18°的倾角,在流程图中即为“是”;而设定90%精度时,运动员则需要实现45°±4.5°的倾角.其他两类传感器的工作算法与倾角传感器一致,因此不再赘述.
3 实验与结果分析
3.1 动作归类验证
为了评判自动评分系统的有效性,研究首先邀请20位专业健美操教师在佩戴相关设备的情况下,各自完成1个8拍的第三套大众二级健美操标准规定动作.一个8拍中包含8个静态型动作、6个跑动型动作和2个跳跃型动作,具有较强的代表性,根据30位学生的采集数据进行动作归类验证,结果如表1所示.
由表1可见,采用朴素贝叶斯最优分类器对目标动作进行检测,总体准确率可以达到85.625%,满足健美操动作分类要求.从不同动作类型来看,针对静态型动作的正确识别次数最高,跑动型动作次之,跳跃型动作最差,这是由于倾角检测器的工作机制原因,在强烈的健美操跑跳之中,即使采用了由加速计和陀螺仪构成的6轴加速度矢量控制器,依然会出现倾角测量不准的问题,这也是系统需要改进的方向.
3.2 自动评分验证
为了进一步考察健美操自动评分系统的打分情况,邀请50名大一学生在佩戴相关设备情况下,各自完成1个8拍的第三套大众二级健美操标准规定动作.同时由5位专业健美操教师对学生进行评分,评分标准与系统方向一致,自动评分系统根据16个动作,每个动作取0分或1分,因此最高可能达到16分,为了保持对比的一致性,评委考察动作姿态、力度和跳跃高度,评分采用16分制,去掉最高分和最低分再均值.受篇幅所限,表2截取了10名同学的打分情况.
从表2可见,学生E的专家评分与自动评分系统出现了较大差别,分别为9.1和6,这是由于该学生的跑动和跳跃动作出现了明显错拍情况,机器识别过程中将多个动作识别为0分,而专家评分则更看重动作的连贯性与完整性,因此造成了评分的差距.

表1 动作归类验证结果
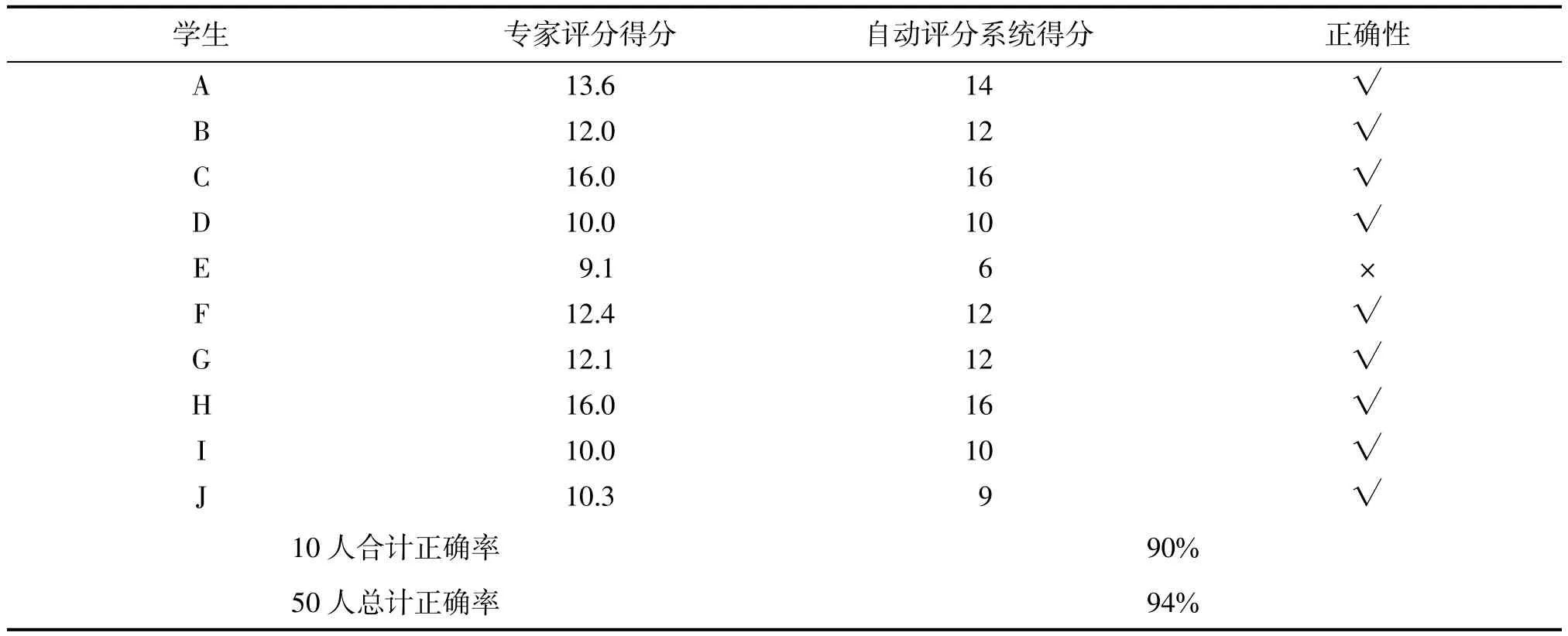
表2 10名学生的健美操评分情况
4 结束语
研究提出结合朴素贝叶斯最优分类器和目标图形监测的健美操自动评分系统,研究结合压力传感器、陀螺仪等力学仪器,绕开视频评分中的光学测量精度问题,进而实现对健美操的系统性评分.研究结果表明:通过可穿戴设备搭建的目标图形监测识别系统能够有效识别健美操动作,考察运动员在健美操过程中的躯干姿态、关节力度和跳跃高度;采用朴素贝叶斯最优分类器对健美操动作进行归类,准确率可以达到85.625%,说明系统的稳健性较强;对50名学生的健美操动作进行专家评分和自动评分,系统准确率达到94%,说明系统的准确率较高.总的来看,本研究所构建的健美操自动评分系统,具备稳定性强、准确率高的特点,具备广泛的应用空间和市场价值.