轿车ECAS 充放气时平顺性的控制研究
2020-11-23孙士雷韩振南
孙士雷,韩振南
(太原理工大学机械工程学院,山西 太原 030024)
1 引言
车辆减震系统对于汽车的舒适性和操作性起着至关重要的作用。电子控制空气悬架(ECAS)是一种适应能力极强,有着很大发展空间的可变悬挂系统[1]。相比与其他悬架的控制方式,汽车在各种工况行驶时,ECAS 通过电磁阀控制空气弹簧的充气和放气[2],实现其高度和刚度的变化,使汽车在各种行驶条件下迅速地达到汽车行驶平顺性、通过性以及操纵稳定性的最佳组合。随着车身电子网络控制系统的高速发展,电子控制悬架理论也越来越受到多家企业和各个高校的重视。文献[3]用变速积分的PID/PWM 控制方法模拟了ECAS 充放气过程中车身高度变化的过程;文献[4]在MTS 实验台上进行了空气弹簧的定压力压缩试验,并且分析了空气弹簧内部压力与弹簧刚度、位移的关系;文献[5]对膜式644N空气弹簧在改造的实验台上进行了充放气实验,根据实验数据直接拟合成空气悬架高度-刚度曲线。与以前空气悬架研究不同的是:利用空气弹簧在定温(多变指数n=1)实验中悬架结构随高度变化的特点,间接得到悬架刚度与高度之间的数学模型;同时,结合减震器阻尼系数的变化特性,建立1/4 的主动式空气悬架数学模型,对此模型进行ECAS 充放气时模糊PID 的平顺性仿真研究。
2 车辆空气悬架模型的建立
根据空气弹簧充放气时的高度变化、悬架刚度以及减震器阻尼系数之间的理论关系,建立1/4 的电子控制主动式空气悬架数学模型。
2.1 空气弹簧的刚度变化
在空气悬架模拟实验台上,模拟汽车在实际路况上行驶时弹簧高度的变化,首先对空气弹簧进行充气实验,充气实验结束后再进行放气实验[6]。在不同的时间下,记录下激振台处位移传感器测试所得空气弹簧的高度数据,如表1、表2 所示。

表1 充气时,时间-高度对应关系Tab.1 When Inflating,Time-Altitude Correspondence

表2 放气时,时间-高度对应关系Tab.2 When Inflating,Time-Altitude Correspondence
根据表1、表2 进行曲线拟合,如图1 所示。
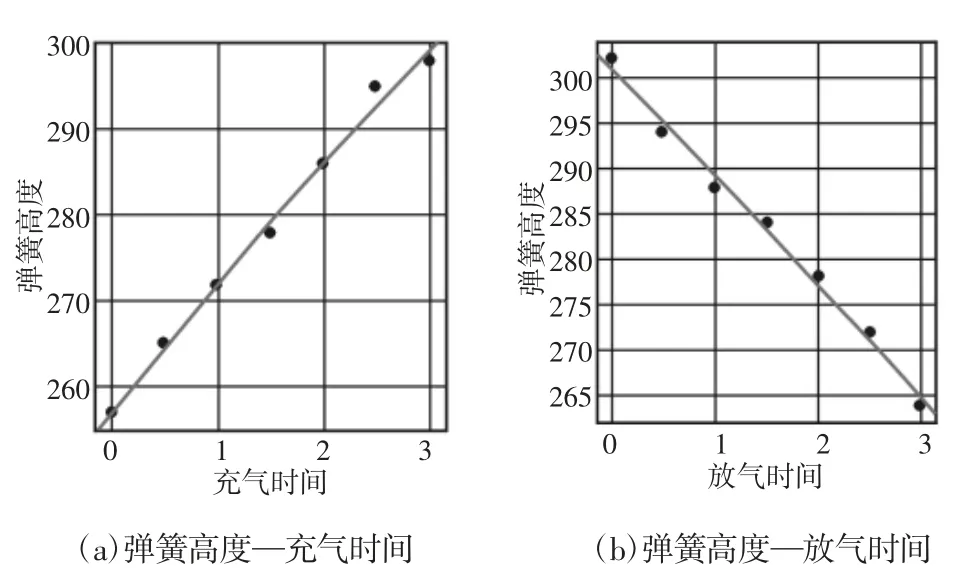
图1 充放气时弹簧高度与时间的关系Fig.1 The Relationship Between Spring Height and Time when Charging and Deflation
根据图1 得到弹簧高度H(mm)-时间t(s)的关系函数:
弹簧高度与充气时间的关系:

弹簧高度与放气时间的关系:

充放气时,空气弹簧的有效面积及有效容积与高度之间的关系:

空气弹簧内气体有效压力与所承受载荷:

根据式(1)-式(6)简化空气弹簧的计算公式:

2.2 减震器阻尼系数的变化
在汽车运动中,减震器对其影响主要取决于阻尼比ε[7]。阻尼比ε 与车身质量m2、弹簧刚度k 以及减震器阻尼系数c 之间的关系:

2.3 1/4 主动式控制空气悬架系统模型
研究车身和车轮两个自由度的振动系统时,将车身垂直位移坐标x2的原点选择在静力平衡位置更加便于悬架系统的简化,简化模型,如图2 所示。

图2 1/4 主动控制空气悬架系统模型Fig.2 1/4 Active Control Air Suspension System Model
建立此模型时,忽略了轮胎阻尼和时间延迟对空气悬架的影响;同时不考虑转向系统、传动系统等对汽车振动的影响。
根据牛顿力学第二定律,其运动方程可以表示为:

其中,

式中:Fz—空气悬架的支撑力;F—空气弹簧的支撑力;Fa—空气弹簧充(放)气时的主动控制力。对其进行整理可得:

运用现代控制理论,确定悬架系统的状态方程:

式中:u—输入变量。
2.4 随机路面输入模型
在这里,路谱的生成采用高斯滤波白噪声,要同时考虑输入的路面不平度及车速对汽车振动系统的影响[8]。路面等级为D 时的路谱表达式为:

式中:qi(t)—路面输入位移,n0=0.1m-1;f0—下截止频率;v—路面不平度等级为D 级时的滤波白噪声路谱速度,v=50km/h,Gq(n0)—D 级路面不平系数的几何平均值,Gq(n0)=1024×10-6m2/m-1。W(t)—数学期望为零的高斯白噪声。
根据式(17),在Matlab 中的simulink 工具箱中,建立路面激励模型,仿真后得到路面激励时域信号,如图3 所示。
3 创建模糊PID 控制器
3.1 选取语言变量
在设计模糊控制器时,既要考虑模糊控制规则的方便使用,还要考虑控制规则的相对灵活性[9],使用七个语言变量,即:负大(NB),负中(NM),负小(NS),零(NULL),正小(PS),正中(PM),正大(PB)。
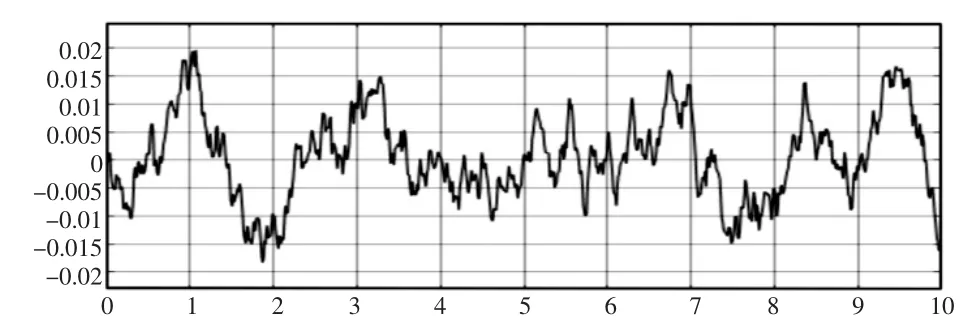
图3 D 级路面谱时域信号Fig.3 Grade D Road Spectrum Time Domain Signal
3.2 模糊控制规则的建立
根据3.1 选取的语言变量,采用if A and B then C 的控制语句不断进行调整,直到得到合理的Kp,Ki,Kd模糊控制规则表,如表3 所示。
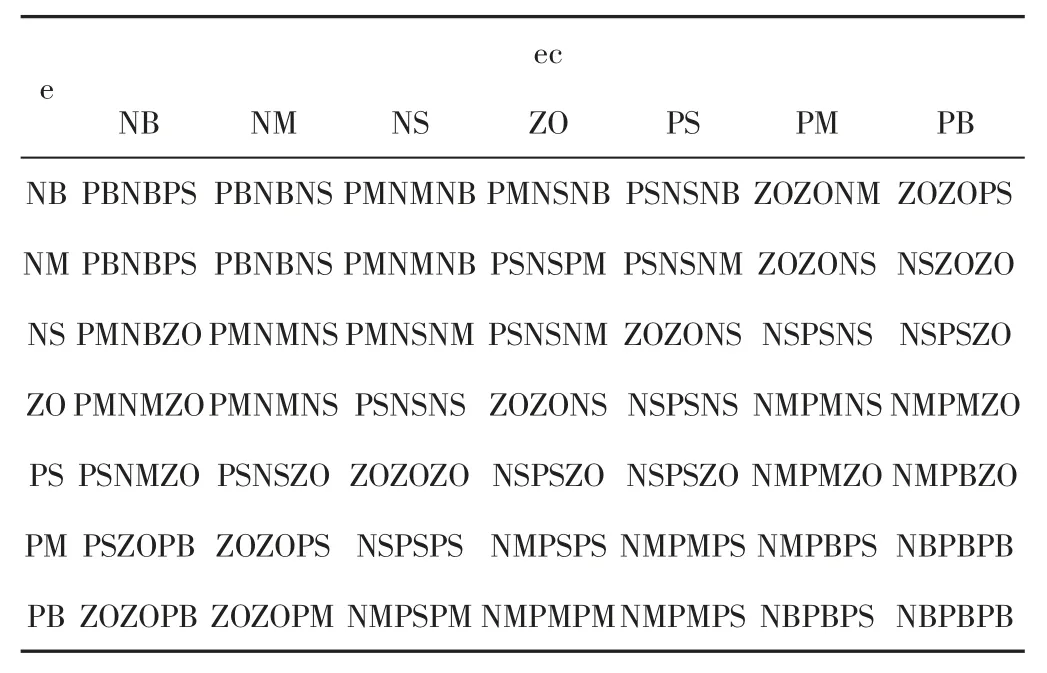
表3 模糊控制规则表Tab.3 Fuzzy Control Rule Table
3.3 解模糊方法的确定
对输出的模糊量进行转换,使其成为被控对象能够接受的精确量。采用重心法将输出的模糊量转换成精确的控制量,在此基础上乘以控制系统的比例因子Kp从而得到实际的控制量[10]。
3.4 模糊PID 控制器的建立
设计模糊PID 控制器的步骤:第一步,求出簧载质量垂直速度系统设定值和实际值之间的差值e,以及两者之间的差值变化率ec;第二步,根据上述的步骤,建立如图4 所示的FUZZY-PID控制模型。
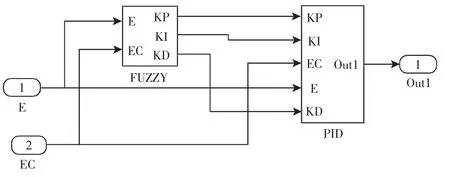
图4 模糊PID 控制器模型Fig.4 Fuzzy PID Control Model
4 仿真结果与分析
4.1 仿真参数的设定
针对丰田某一款车型的空气悬架,其相关参数,如表4 所示。
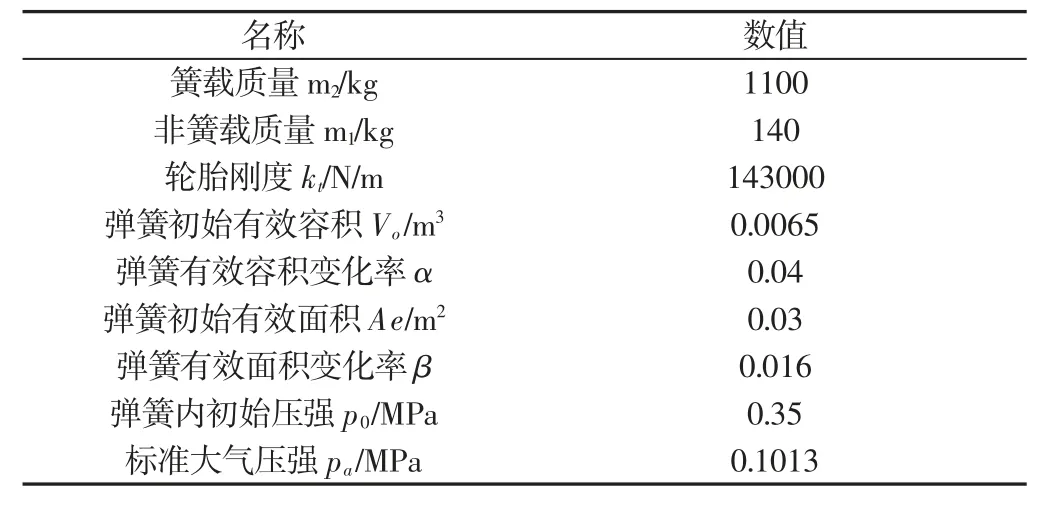
表4 模型相关参数Tab.4 Model Related Parameters
4.2 仿真模型的建立
根据空气悬架充、放气时的悬架刚度式(7)、减震器阻尼系数式(8)以及汽车二自由度的运动微分方程式(13)、式(14),搭建如图5 所示的汽车悬架二自由度模糊PID 控制器仿真模型。
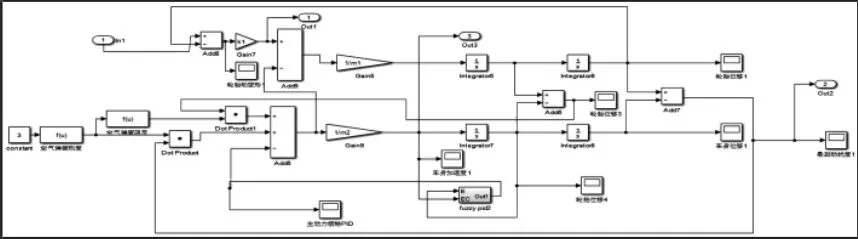
图5 模糊PID 控制的动力学模型Fig.5 Fuzzy PID Control Dynamics Model
4.3 仿真结果及结果分析
在 D 级高斯白噪声路面上,根据式(1)式、(7)、式(8)、式(13)、式(14)进行模糊PID 控制前后汽车充气时平顺性的仿真,如图6 所示,并进行比较分析。

图6 充气时,控制前后汽车平顺性能的对比Fig.6 When Inflating,Comparison of Vehicle Smoothness Before and After Control
将充气时汽车平顺性的数据结果进行归纳,并对其进行对比分析,如表5 所示。

表5 充气时性能对比Tab.5 When Inflating,Performance Comparison
在D 级高斯白噪声路面上,根据ECAS 放气时的特点,结合式(2)、式(7)、式(8)、式(13)、式(14)进行汽车平顺性的模糊 PID仿真,如图7 所示。
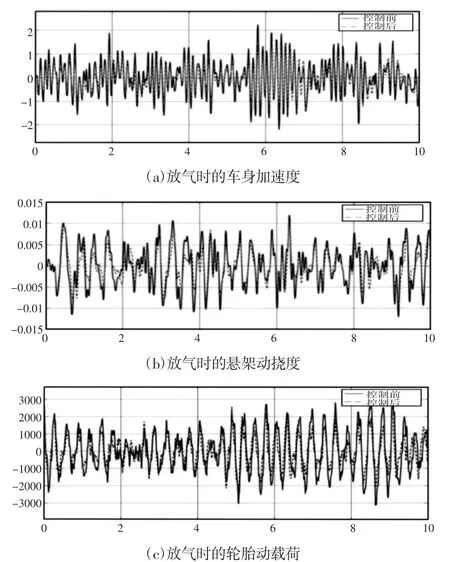
图7 放气时,控制前后汽车平顺性能的对比Fig.7 When Deflating,Comparison of Vehicle Smoothness Before and After Control
将放气时汽车平顺性的数据结果进行归纳,并对其进行对比分析,如表6 所示。
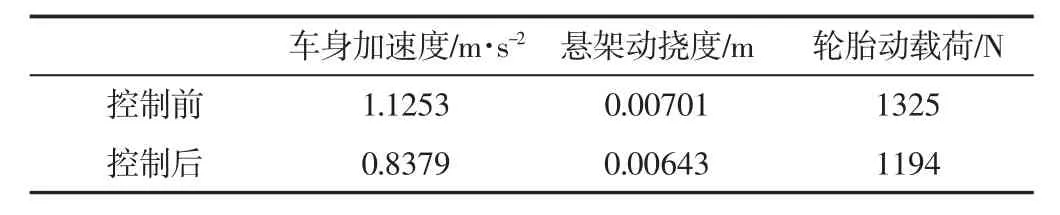
表6 放气时性能对比Tab.6 When Deflating,Performance Comparison
通过图(6)-(7)可以看出,采用模糊 PID 控制策略后,空气悬架充放气时的平顺性(尤其是车身加速度)得到改善,并且相对稳定。由表5 可知:进行模糊PID 控制后,空气悬架在进行充气时,车身加速度改善了24.74%,悬架动挠度和轮胎动载荷分别优化了9.33%和8.54%;由表6 可知:放气时,车身加速度改善了25.54%,悬架动挠度和轮胎动载荷分别优化了8.27%和9.87%。
5 结论
(1)通过表5 和表6 数据对比可以看出,充气时汽车的车身加速度略优于放气时汽车的车身加速度,但是悬架动挠度及轮胎动载荷略占劣势。
(2)对于汽车悬架,主要体现在悬架结构以及控制策略方面的研究。其中,Fuzzy-PID 控制在控制策略方面对于汽车的舒适性和通过性有着明显的改善。
(3)我国电子控制空气悬架由于技术的限制及制造成本的阻碍,在中低端家用轿车中分布较少。根据空气悬架充放气过程中结构的变化特点,在下一步的研究中,应该进一步对空气悬架的结构进行合理的研究,降低其生产成本,提高汽车在坏路面连续行驶时的通过性及平顺性;此外,空气悬架控制策略方面的研发工作,也应该进一步加强。
