高速公路合流区车辆跟驰行为分车道差异性
2020-11-23
(长安大学汽车学院,陕西 西安 710064)
0 引言
高速公路合流区作为主线道路与匝道交汇的特殊路段,其含有车辆的加减速、频繁变换车道、匝道交通流汇入主线行驶等行为的复杂交通环境易对驾驶员的正常操作产生干扰,导致主线交通流不稳定和交通事故频发[1]。有研究表明,高速公路分合流区域公里事故率是其他路段的4~6 倍,该区域属事故多发路段,存在的交通安全问题较为突出[2]。因此,对高速公路分合流区域驾驶员的微观驾驶行为相对于普通路段的差异性进行深入研究,对于理解高速公路特殊路段的交通流特性、完善该区域安全管理机制、降低交通事故率具有重要意义。
车辆跟驰行为是一种基础的微观驾驶行为,描述了在交通环境不适合超车的情况下同一车道内列队行驶的相邻两车之间的相互作用。车辆跟驰概念最早于20 世纪50 年代初被提出,经大量学者深入研究,已形成了较为完备的车辆跟驰理论[3]。国外对跟驰行为的研究开展较早,主要集中于各类跟驰模型的提出与改进[3-5],以及基于跟驰车辆轨迹数据和驾驶人反应特性数据的跟驰行为特征分析[6-7]。国内外驾驶人生理特性、驾驶习惯和道路条件等方面存在的差异,使得国外模型在国内的适用性受限。而国内对跟驰行为的研究起步较晚,较多研究为对国外跟驰模型的改进,如考虑侧向车道、前后多车和跟随车偏离车道中心线等特定因素影响下的跟驰模型构建[8-10],此外,部分学者对信号控制交叉口、环形交叉口等特殊路段和驾驶员个体特征等影响下跟驰行为呈现的特征进行了分析[11-13]。上述研究虽考虑到了复杂交通流对跟随车辆的影响,但由于高速公路合流区域实车采集跟驰数据较困难,暂无学者针对该区域交通流影响下车辆跟驰行为相对于普通路段的差异性进行探讨。合流区域复杂的交通流特性和地形特征,使得各车道驾驶员受到的干扰不一样,导致各车道内车辆表现出的跟驰行为有所不同。因此,开展合流区域内跟驰行为研究,对于补充特殊路段车辆跟驰轨迹基础数据库,完善对复杂交通流影响下车辆跟驰行为特性的掌握有重要意义。
本文基于从高速公路合流区域拍摄的视频中获取的车辆跟驰轨迹数据,提取并量化了11个表征跟驰行为特性的特征参数,从跟驰车速稳定性、跟驰行为倾向性和横向位置稳定性3个维度,探讨了不同车道跟驰车辆受区域内交通流影响所表现出来的跟驰行为差异性。结合粒子群优化(Particle Swarm Optimization,PSO)算法和模糊C均值(Fuzzy C-Means,FCM)算法分别从3 个维度对驾驶员的跟驰行为特征进行聚类,深入分析不同车道跟驰行为存在的差异性。通过对合流区微观驾驶行为的研究,可更好地理解高速路合流区内驾驶员的行为特征、特殊的区域交通流特性与交通事故状况3 者之间存在的内在关联,能为进一步开展高速公路合流区域事故风险评价提供依据。
1 驾驶员跟驰行为特征参数提取
为准确全面地探究车辆在通过高速公路合流区域时,受交通流影响表现出的跟驰行为特性,本文选取了11个特征参数来表征跟驰车辆在纵向和横向上行驶状态的变化,其中包含8 个表征车辆纵向跟驰状态的特征参数和3 个表征车辆横向跟驰状态的特征参数(见表1)。选取标准为参数值过大或过小是否会引起同车道车辆的碰撞、是否明显干扰相邻车道的车辆行驶及是否会造成车内乘员的不良反应。

表1 跟驰行为特征参数选取
2 基于Tracker的车辆轨迹数据提取
选择大疆Inspire 2无人机作为视频采集设备,控制其飞至西安市丈八立交双向6 车道高速公路合流区上方,并严格垂直于路面对300m 范围内区域进行视频拍摄。视频采集的时段选在2019年9 月15 日14:30—15:00 之间,为天气晴朗、基本无风、光线良好的工作日平峰时段,最大程度排除气候变化对数据采集的不利影响。
从采集的视频中截取出一段画面抖动不明显的3min 片段,并用Premiere 软件的变形稳定器效果进行处理,最大程度减小无人机轻微抖动对视频数据提取的影响。视频数据提取软件选择Tracker,软件操作界面见图1,提取车辆轨迹数据的具体过程如下。

图1 车辆行驶轨迹追踪软件界面
(1)建立统一的坐标系并对图像中的距离进行标定。以高速公路一个车道宽(3.75m)对图像的距离进行标定,将x轴与内侧车道线重合,y轴垂直于车道线,将坐标系的原点O设置于距离入口大概150m处。
(2)对车辆进行编号,在车头部分建立质点,并将质点的追踪时间间隔设置为3 帧,采样频率为10Hz。
(3)将Tracker 中记录的数据导出,得到了48辆跟驰车辆(其中,外侧车道、中间车道和内侧车道各16辆)的行驶轨迹数据,包括前后车的编号、前车车长、采样时刻、前后车位置坐标等,共计50 445条数据。
为验证使用视频方法提取车辆轨迹数据的可靠性,在视频采集过程中安排一辆装有车载GPS测速仪的试验车行驶过拍摄路段,由车载GPS 测速仪实时采集试验车车速数据。同时,无人机也对试验车进行视频拍摄,然后使用Tracker提取试验车的轨迹数据。对车载GPS 测速仪采集的车速数据和Tracker中提取出的该试验车的车速数据进行曼-惠特尼(Mann-Whitney)U检验,这是一种关于两个独立样本的非参数检验方法,无需假定总体分布,可用来检验两种方法获取的数据是否存在显著差异。车速数据如图2 所示,用SPSS进行U检验的结果显示p=0.525>0.05,结果表明两种方法获取的数据并无显著差异,因此使用视频方法提取车辆轨迹数据是可靠的。
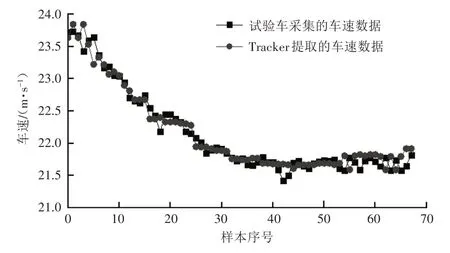
图2 两种方法获取的试验车车速数据
由于目标追踪的时间间隔为0.1s,导致提取的数据存在大量的噪声信号,故利用快速傅立叶变换(Fast Fourier Transform,FFT)滤波算法对原始轨迹数据进行降噪处理,并用相关软件计算得到表征车辆跟驰行驶状态的11 个特征参数数据样本。
3 粒子群优化的FCM聚类算法
基于梯度下降的FCM 算法是一种局部搜索算法,对初始中心较敏感,容易陷入局部最优[15]。而PSO 算法通过调整参数可获得很强的寻找全局最优解的能力,但在接近全局最优解时收敛速度会非常缓慢[16]。因此本文选择PSO 算法和FCM 算法相结合的聚类方法,对车辆跟驰行为特征参数进行聚类分析。算法的初始阶段利用PSO 算法在整个d维样本空间中搜索最佳聚类中心,当PSO算法找到全局最优区域,即适应度函数的值在多个连续迭代中的变化可以忽略不计时,聚类过程切换到FCM 聚类,可以更快的收敛速度和更高的准确性完成聚类任务。算法流程如图3所示。
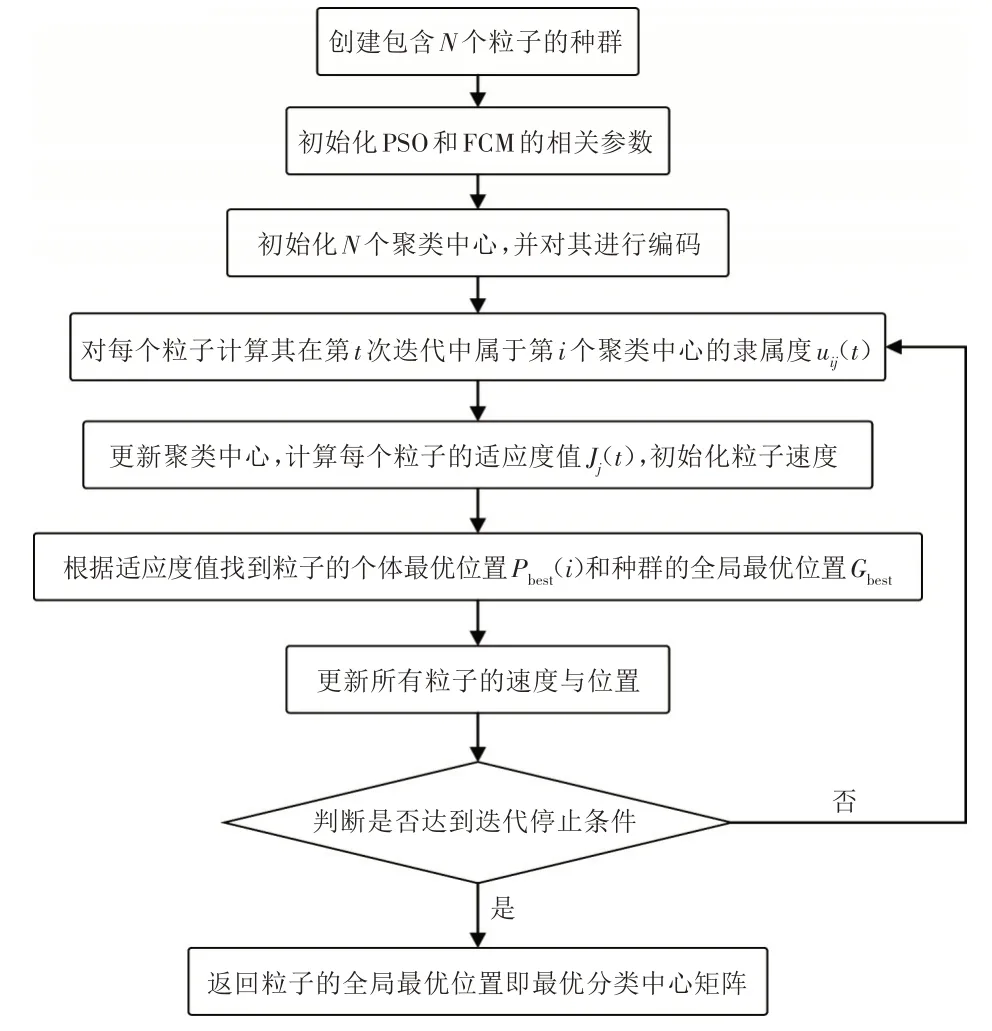
图3 PSO-FCM算法流程图
4 基于PSO-FCM 的跟驰行为聚类分析
为了探究车辆在高速公路合流区域内的跟驰行为特征,以及不同车道的跟驰行为是否因侧向车道车辆行为的影响不同而表现出明显的差异性,利用PSO-FCM 算法从纵向和横向两个方向对驾驶员的跟驰行为特征进行聚类分析。参数设置为:粒子群规模N=20,惯性权重ωmax=0.9,ωmin=0.4,权重系数m=2,学习因子c1=c2=2,最大迭代次数itermax=100。考虑到基于距离的聚类效果评价指标不能很好地识别重叠的类别、对样本噪声点敏感等缺陷,本文选取Chen 等人[17]提出的非基于距离的模糊聚类有效性指数Vcs作为聚类效果评价指标,基于隶属度矩阵计算出的类内紧致度C和类间离散度S评价聚类结果。C越大聚类效果越好,S越小聚类结果越清晰,所以Vcs值越大,聚类效果越好,其计算公式如下:

式(1)~式(3)中:c为划分的类别数;n为样本个数;Cij为第j个样本对第i类的紧致度;Sik为第i类和第k类样本间的离散度,表示样本点j属于这两个类别的隶属度最小值;uij为第j个样本对第i类的隶属度;ukj为样本j对第k类的隶属度。
4.1 分车道纵向状态差异性
基于表征车辆速度稳定性的6 个特征参数对跟驰数据样本进行聚类,划分的类别数为3 时输出的Vcs指数为0.734,聚类效果良好,结果如表2所示。
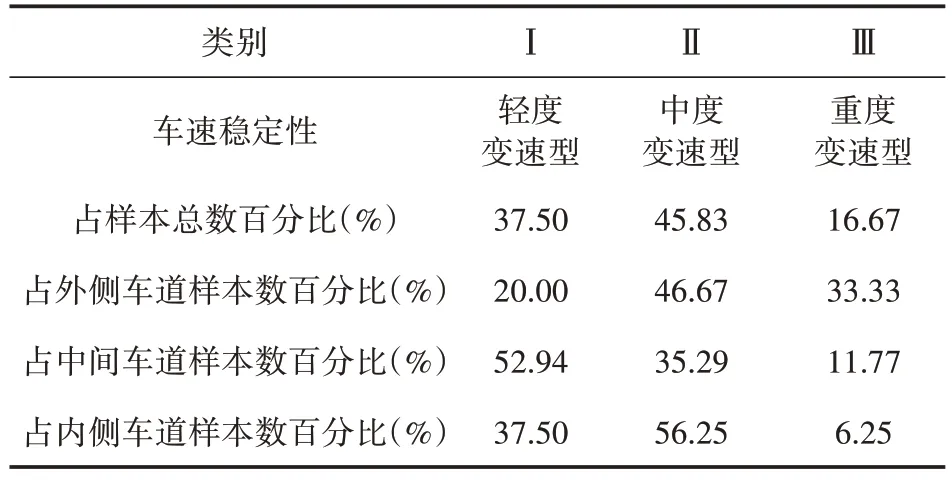
表2 基于车速稳定性参数的跟驰行为特征聚类
由表2 可知,高速公路入口合流区域交通流稳定性不好,基本不存在无变速稳定跟驰状态,而62.5%的驾驶员跟驰行驶时存在中度以上的变速行为,其中16.67%的驾驶员出现比较剧烈的车速变化。在内侧车道中,跟驰车辆速度相对稳定,基本只存在轻中度变速行为,中度变速行为所占比例较大,说明内侧车道作为超车车道,驾驶员跟驰行为会受到侧向车道车辆换道超车行为的干扰。中间车道中,跟驰车速比较稳定,88.23%的驾驶员仅出现了轻中度的变速行为,仅有11.77%的驾驶员存在重度变速行为。外侧车道跟驰车速的稳定性较差,80%的驾驶员存在明显的变速行为,且车道中33.33%的跟驰驾驶员存在重度的车速调整倾向,占到了整个影响区内重度变速行为的62.5%,说明匝道汇入车辆对外侧车道驾驶员的跟驰行为产生了较大的影响,迫使其不断调整自车速度,来保证安全跟车行驶。
基于表征跟驰行为倾向性的2 个特征参数对跟驰数据样本进行聚类,划分的类别数为3 时输出的Vcs指数为0.769,说明聚类效果良好,结果如图4和表3所示。

图4 跟驰行为倾向性特征参数聚类结果
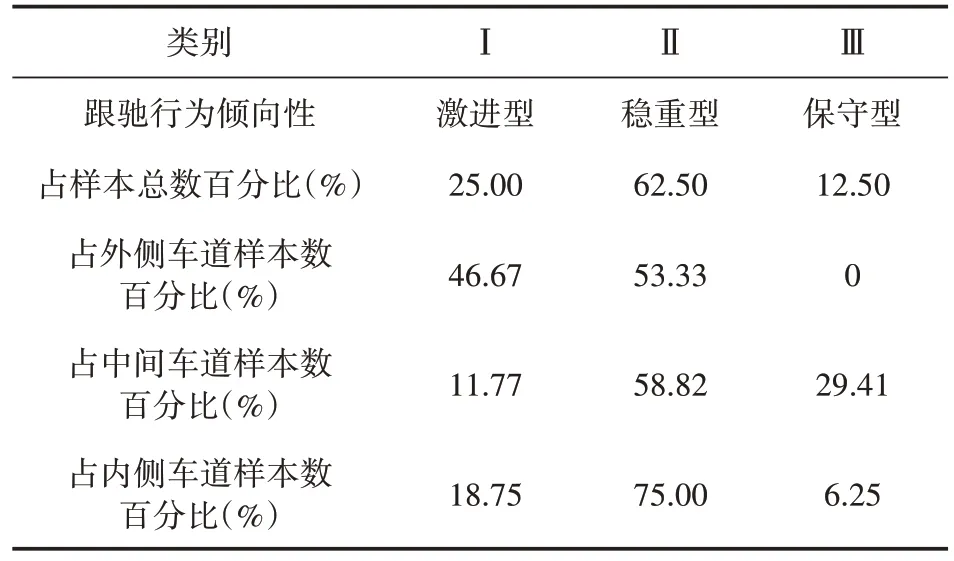
表3 基于跟驰行为倾向性参数的跟驰行为特征聚类
由图4 和表3 可知,25%的驾驶员在跟驰行驶时表现比较激进,在车头时距为2.5s 以内的情况下,持续以高于前车约4.5km/h 的车速行驶,出现紧急状况时,发生事故的概率较大。62.5%的驾驶员保持较为稳健的跟驰行驶状态,后车车速略高于或低于前车车速,车头时距也较为安全。而12.5%的驾驶员出于安全考虑,行为更保守,以低于前车约11km/h的车速行驶,车头时距也在3s 以上,这会对交通流产生一定的阻滞作用。
内侧车道中,75%的驾驶员跟驰行为比较稳重,说明内侧车道车辆受侧向车道车辆的干扰相对较小,驾驶员能以比较理想的跟驰状态跟车行驶。中间车道稳重型驾驶行为占了58.82%,但29.41%的驾驶员更倾向于保守型跟驰,占到了整个路段保守型跟驰行为的83.33%,说明中间车道驾驶员对跟驰车速和车头时距的选择受两侧交通流的影响较大。而外侧车道中,存在46.67%的激进型跟驰行为,可理解为匝道汇入交通流对前车产生了影响,或由于主线优先通行原则使得后车驾驶员加速通过入口区域,导致后车车速高于前车且车头时距较小。
4.2 分车道横向状态差异性
以表征车辆跟驰状态横向变化特征的3 个特征参数μdl、μdr、sdm为聚类指标,利用PSO-FCM算法对48辆车跟驰数据样本进行聚类分析。按各特征参数的特性,划分的类别数为4 时Vcs指数的输出值为0.823,达到了很好的聚类效果,结果如图5和表4所示。

图5 横向状态特征参数聚类结果
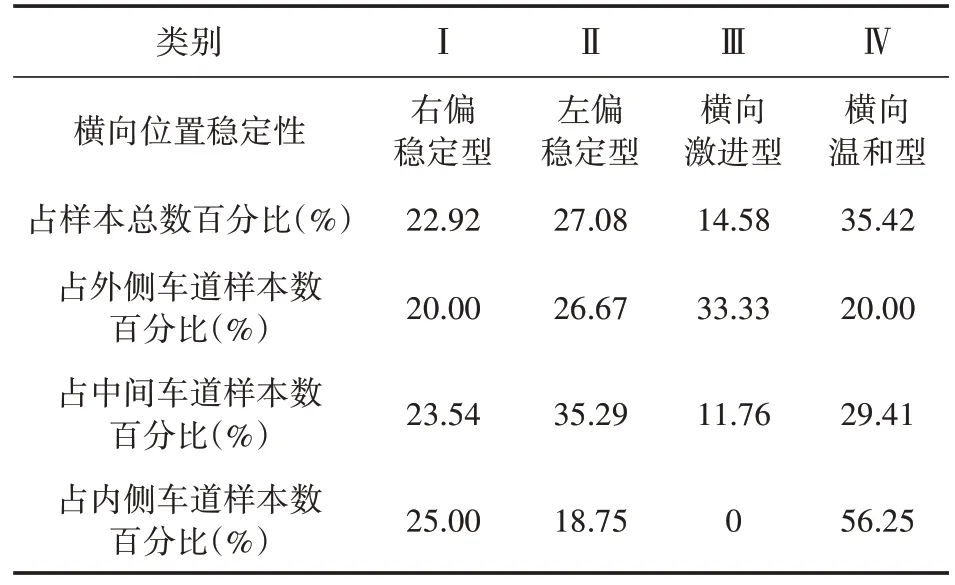
表4 基于横向特征参数的跟驰行为特征聚类
由图5 和表4 可知,仅有35.42%的驾驶员属于横向温和型,会稳定地沿着车道中心线跟车行驶。而64.58%的驾驶员会受到侧向车道车辆的干扰,自发调整自车在车道内的横向位置。其中,14.58%的驾驶员属于横向激进型,其驾驶行为受两侧车道车辆影响较大,会不断左右调整自车在车道内的横向位置。
内侧车道属超车车道,驾驶员受侧向车道车辆的影响较小,56.25%的跟驰行为属横向温和型,车辆会保持在车道中心线附近行驶,仅有18.75%的驾驶员会受到中间车道的影响而向左偏移车道中心线行驶,而25%的驾驶员会受到左侧对向来车的影响而偏向右侧行驶。中间车道中,70.59%的驾驶员跟驰行驶时会受到两侧车道交通流的影响而偏离车道中心线行驶,但横向位置比较稳定,仅有11.76%的驾驶员存在频繁左右调整位置的行为。外侧车道的跟驰行为中,4 种类型的跟驰行为都存在,其中横向激进型占33.33%,占整个路段该类行为的71.43%,可见整个路段出现的横向激进型跟驰行为基本都发生在了外侧车道,说明匝道和中间车道的车流对驾驶员跟驰行为产生了较大干扰,迫使其不断调整横向位置。同时,仅有20%的驾驶员会选择偏向右侧行驶,而26.67%的驾驶员选择偏向左侧行驶,说明匝道汇入交通流比中间车道交通流对外侧车道驾驶员跟驰行为横向位置选择的影响更大。
4.3 跟驰行为分车道差异性总结
综合上述分析可知,内侧车道车辆跟驰车速相对稳定,基本只存在轻中度变速行为,受侧向车道车辆的干扰相对较小,驾驶员能以比较理想的跟驰状态跟车行驶,但作为超车车道,其他车道车辆的行驶状态也会对其产生一定程度的影响;中间车道车辆速度较为稳定,跟驰行为倾向于保守,驾驶员会根据两侧交通流的变化调整车速和车头时距,偏离中心线行驶,但横向位置相对稳定;外侧车道驾驶员受匝道汇入车辆和中间车道车辆的影响会不断调整自车速度和其在车道中的横向位置,跟驰行为也较为激进,存在较大的安全隐患。
可推断,高速公路合流区不同车道内驾驶员表现出的跟驰行为特征,与该区域内匝道交通流汇入主线、车辆频繁换道和变速等复杂的交通流特征存在较大关联,即驾驶员受到交通环境的影响,在跟车过程中会不断调整行驶状态,且不同车道内受到的影响不一样,这将造成驾驶员明显的驾驶行为差异,在一定程度上也会导致路段内交通事故的发生。因此,与区域内交通事故频发的现状结合起来,对该区域内不同车道内的车流进行有针对性的引导,可有效改善交通安全现状,这对开展高速公路合流区域事故风险评价的进一步研究具有重要意义。
5 结语
本文通过分析从无人机拍摄的视频中获取的车辆轨迹数据,探讨高速公路合流区内车辆跟驰行为特征及不同车道内车辆受不同干扰而呈现出的行为差异。车辆的跟驰行为表现在合流区域内并不稳定,且不同车道内的车辆跟驰状态存在明显差异。其中:外侧车道驾驶员受到的影响最大,行驶状态不稳定且易表现出较激进的跟驰行为;中间车道次之;内侧车道相对稳定,受区域交通流干扰相对较小。受限于数据获取方式,本文仅对高速公路合流区内不同车道车辆跟驰行为存在的差异进行了探讨。此外,本文仅考虑了在其他车辆可能存在的横向和纵向行驶状态变化的影响下,后车跟随前车行驶时在某一车道内跟驰行为的变化情况。后续应补充合流区域内车辆换道的数据和交通事故数据,完善其他车辆的行为对后车换道行为决策和路径选择的影响研究,以量化此区域内特殊的交通流特性与交通事故风险的内在联系。
