基于改进天棚控制的混合电磁主动悬架节能机理与试验
2020-11-23孟祥鹏孙泽宇丁仁凯汪若尘
孟祥鹏,孙泽宇,丁仁凯,汪若尘,陈 龙
(1.江苏大学 汽车工程研究院,江苏 镇江212013;2.江苏大学 汽车与交通工程学院,江苏 镇江 212013)
长期以来,被动/半主动悬架难以有效改善汽车的动力学性能,并且产生的振动能量都以热能的形式耗散掉,造成了能量浪费[1];电液式主动悬架和空气主动悬架虽然能够大幅提升汽车的动力学性能,但结构上始终受限于执行器的固有特性,普遍存在能耗高、响应滞后、可控带宽小等共性问题[2-3].线性电磁主动悬架采用直线电动机作为系统执行器,具有能量再生和主动控制双重功能,得到了广泛关注[4-6].
S.LEE等[7]设计了多种控制方法并将其应用于线性电磁作动器中,证明了线性电磁主动悬架能够大幅改善汽车的动力学性能.WANG J.B.等[8]设计了满足悬架系统性能需求的线性电磁作动器,证明了该结构用于主动控制的可行性和有效性.现有研究都是采用单一直线电动机作为系统执行器,这将无法确保悬架系统主动控制时的可靠性或能量再生时系统的基本动态特性,其主要原因是直线电动机的“被动阻尼”过小[9].如G.P.A .KOCH[10]设计的直线电动机在短路状态(最大阻尼力状态)下仅能产生940 N·s·m-1的阻尼系数,该阻尼系数无法满足汽车正常行驶需求(中级车辆正常行驶所需的平均阻尼系数一般为1 500~2 000 N·s·m-1).同时,采用单一直线电动机作为执行器的电磁主动悬架仍然具有高能耗的缺陷.为了解决上述问题,B.L.J.GYSEN等[11]在直线电动机的齿槽内加入铝环,形成涡流阻尼,提高了系统的可靠性,研究结果表明:适当的涡流阻尼能够降低主动控制过程中的能量消耗,但该研究并未给出引入涡流阻尼能够实现节能的一般机理.为此,笔者以降低线性电磁主动悬架主动控制模式下的系统能耗为研究目标,以集成阻尼器与直线电动机的混合电磁作动器作为潜在解决方案,探索混合电磁主动悬架相较于线性电磁主动悬架的节能机理,并试制混合电磁作动器,以波动悬架和线性电磁主动悬架为研究对象,进行动力性能与节能性能的对比台架试验,验证理论分析的正确性.
1 混合电磁作动器
设计的混合电磁作动器如图1a所示,它由直线电动机与磁流变阻尼器集成.直线电动机用于输出主动控制力,磁流变阻尼器用于输出阻尼力.直线电动机置于磁流变阻尼器外部,并以磁流变阻尼器作为设计基准.磁流变阻尼器和直线电动机之间置有分隔装置,该分隔装置的作用如下:① 降低两者间的电磁干扰;② 减少两者间的热量传递;③ 为线圈绕组提供安装空间.分隔装置和线圈与阻尼器的活塞杆固连,永磁体和外筒与托盘固连,如此,线圈和永磁体可产生相对运动,根据法拉第电磁感应定律,直线电动机将产生感应电动势,向外输出能量,实现振动能量再生;而当外部能源向线圈供电时,则是消耗能量实现主动控制.文中主要研究直线电动机的主动模式.
混合电磁作动器的实体样机如图1b所示.作为对比,图1c给出了未集成阻尼器的线性电磁作动器(直线电动机),而相比于线性电磁作动器,混合电磁作动器的优势主要体现在3个方面:① 混合电磁作动器具有更高的可靠性,即使直线电动机或供电系统出现故障,其仍能以被动的形式工作;② 混合电磁作动器在回馈能量的过程中能够确保系统的基本动态性能;③ 混合电磁作动器能够降低主动控制过程中的系统能耗,其节能机理将在下文给出.混合电磁作动器和线性电磁作动器的基本性能如表1所示.

图1 混合电磁作动器
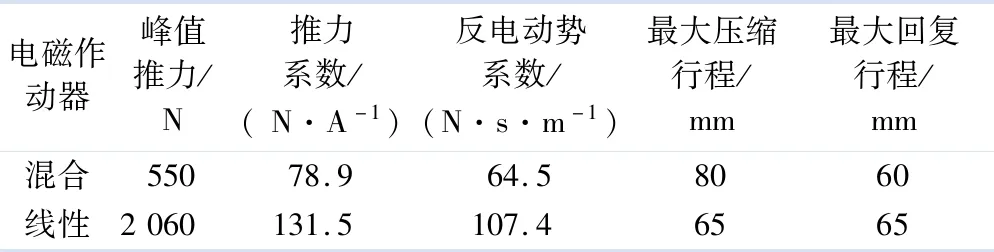
表1 混合电磁作动器和线性电磁作动器的基本性能参数
2 节能机理分析
以1/4悬架系统为研究对象,采用的混合电磁主动悬架系统动力学模型如图2所示.
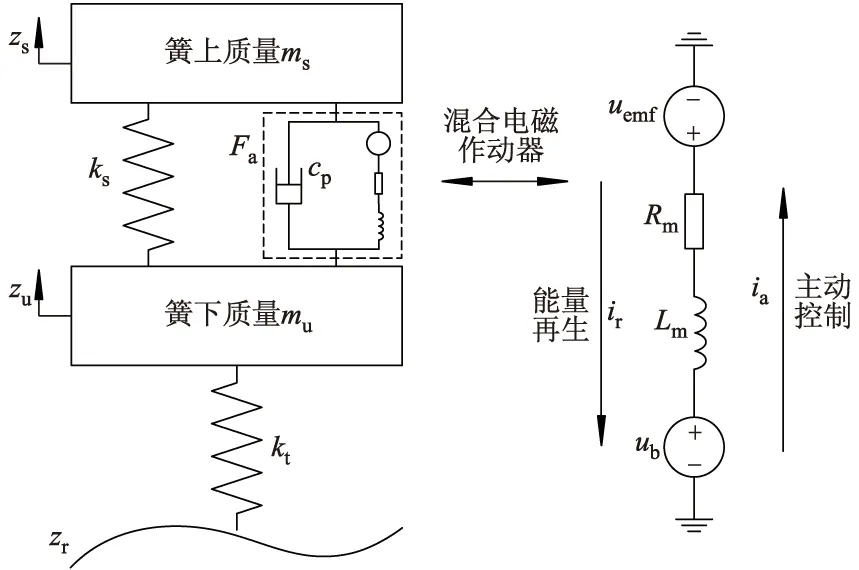
图2 混合电磁主动悬架系统动力学模型
系统动力学方程为
(1)
式中:ms为簧上质量;mu为簧下质量;ks为弹簧刚度;kt为轮胎刚度;zs为簧上质量位移;zu为簧下质量位移;zr为路面位移;Fa为作动器输出作用力,取决于控制策略.
采用滤波白噪声作为路面输入,路面输入为
(2)
式中:f0为截止频率;n0为空间频率;Gq(n0)为路面不平度系数;v为车速;w为白噪声.
系统参数如下:ms=317.5 kg;mu=45.4 kg;ks=22 kN·m-1;kt=192 kN·m-1;f0=0.1 Hz;n0=0.1 m-1.
动力学性能的评价指标如下:
(3)
(4)
(5)
式中:aacc为车身加速度;Fdtl为车轮动载荷;fsws为悬架动挠度;‖·‖rms为均方根值;T为采样时长.
系统能耗的评价指标如下:
(6)
(7)
式中:Pmech为机械功率;Fha为混合电磁主动悬架的作用力;Pele为电功率;ub为直线电动机输出电压;ia为直线电动机输出电流.
式(6)是以主动控制力产生的机械功率进行间接评估,适合理论分析;式(7)是以电动机消耗的电功率进行直接评价,适合实际测试.式(6)、(7)的关系为
(8)
式中:ηmotor为转化效率.
合理的控制策略是混合电磁主动悬架实现良好动力学控制效果的前提.由D.KARNOPP 等[12]提出的天棚控制,因能够兼顾系统动态性能与实际应用,且具有较强的鲁棒性,使用最为广泛.但是,传统天棚控制会使高频段(车轮共振)的动态性能恶化,为此,K.S.HONG等[13]提出了一种改进天棚控制,即在天棚控制的基础上引入被动阻尼,实现被动阻尼与天棚阻尼在整个频域内的互补.改进天棚控制输出的理想作用力为
(9)
式中:csky为天棚阻尼系数;cp为被动阻尼系数.
当将该控制策略应用于混合电磁主动悬架时,可以发现,混合电磁作动器的混合结构恰好能够匹配改进天棚的“混合阻尼”.而用于线性电磁主动悬架时,直线电动机需要同时输出被动阻尼力和天棚阻尼力,即两者的矢量和.在相同行驶工况下,混合电磁主动悬架的作用力为
(10)
线性电磁主动悬架中直线电动机实际输出的作用力为
(11)
混合电磁主动悬架的机械功率为
(12)
线性电磁主动悬架中直线电动机实际输出的机械功率为
(13)
显然,相同行驶工况下,混合电磁主动悬架直线电动机输出的作用力及机械功率必然低于线性电磁主动悬架.混合电磁主动悬架相较于线性电磁主动悬架能够实现节能的原因如下:由于混合电磁主动悬架中的阻尼器能够分担部分调节阻尼所需的作用力(或是与悬架速度相关的部分被动作用力),而线性电磁主动悬架只能通过电动机产生与悬架位移及速度相关的作用力,故混合电磁主动悬架中电动机输出的机械功率将远远小于线性电磁主动悬架.
3 试验验证
3.1 控制参数确定
为了验证上述理论分析的正确性,分别以被动悬架和线性电磁主动悬架为比较对象,通过台架测试进行对比验证,其中,被动悬架用于验证混合电磁主动悬架在动力学方面的改善效果,线性电磁主动悬架用于验证节能效果.
以C级路面为例,分析了改进天棚控制参数(csky,cp)对系统动力学性能的影响,其中,天棚阻尼的变化范围为0~20 kN·s·m-1,被动阻尼的变化范围为0.5~2.5 kN·s·m-1,改进天棚控制参数对系统动力学性能的影响如图3所示.当被动阻尼为定值时,车身加速度均方根值随着天棚阻尼的增大而减小,悬架动行程和轮胎动载荷则是先减小后增大,且当csky=2 kN·s·m-1时具有最小值;当天棚阻尼固定时,悬架动行程和轮胎动载荷均方根值都随着被动阻尼的增大而减小,而车身加速度则是不断增大,为此,选取cp=1 kN·s·m-1作为折中设计.根据上述分析,为了兼顾各动态性能,选取cp=1 kN·s·m-1,csky=2 kN·s·m-1.

图3 改进天棚控制参数对系统动力学性能的影响
3.2 控制系统设计
在此基础上,设计了基于改进天棚控制的混合电磁主动悬架双环控制系统,如图4所示.其中,外环为悬架控制器,用于获取理想天棚阻尼力;内环为电动机控制器,用于跟踪理想天棚阻尼力.悬架控制器的输入信号是车身的绝对速度信号,也就是说,外环控制的关键是获取车身绝对速度,但在车辆实际行驶过程中,很难直接获取车身的绝对速度信号,往往是通过加速度信号进行积分来间接获取,但直接积分后的速度信号存在误差,这一方面是受到高频噪声信号的干扰,另一方面是由于加速度传感器的输出存在固定零点漂移,同时,积分初始值不为0,同样会造成积分累计效应.因此,如何有效处理加速度信号以获取真实的速度信号对控制精度有着重要影响.为此,采用加速度传感器采集车身加速度信号,并通过设计组合滤波器来获取车身绝对速度信号.组合滤波器如图5所示,主要由一阶低通滤波器L1(s)、L2(s)和一阶高通滤波器H(s)组成,其中,一阶低通滤波器L1(s)用于滤除高频噪声信号,L2(s)用于对加速度信号进行积分,一阶高通滤波器H(s)用于滤除零点漂移及积分初始值不为0引起的低频干扰信号.
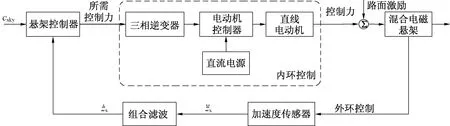
图4 混合电磁主动悬架双环控制系统

图5 组合滤波器
内环控制是控制直线电动机跟踪理想天棚阻尼力.直线电动机电流滞环控制系统如图6所示.

图6 直线电动机电流滞环控制系统

3.3 台架测试
二自由度试验台架如图7所示,由INSTRON 8800数控液压伺服激振台模拟随机路面激励(见式(2)),采用6组弹簧模拟轮胎刚度,采用加速度传感器和位移传感器分别测量车身加速度和悬架动挠度,轮胎动载荷可由激振台上的力传感器直接获取.设计了组合滤波器硬件电路,将滤波后的速度信号作为悬架控制器的输入.各传感器所测数据由数据采集仪进行采集,并进行离线滤波.
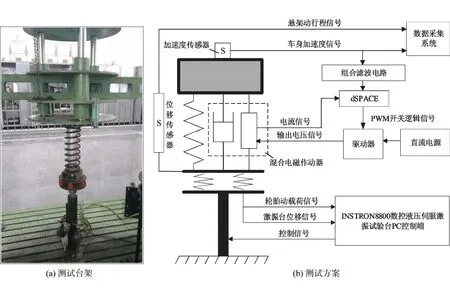
图7 台架测试布局
悬架时域动力学性能评价指标的均方根值如表2所示.

表2 时域动力学性能对比
从表2可以看出:相较于被动悬架,混合电磁主动悬架的车身加速度和悬架动挠度均方根值分别降低了23.35%和14.97%,虽然车轮动载荷均方根值增加了13.20%,但根据“3σ”原则,仅有0.30%的概率使车轮跳离地面.因此,采用改进天棚控制策略的混合电磁主动悬架系统能够在确保车轮与地面具有良好接触的前提下有效提升车辆的乘坐舒适性,并确保悬架动挠度在合理的范围内.
混合电磁主动悬架与被动悬架的时域动力学性能对比如图8所示.对时域结果进行傅立叶变换,得到了各动力学性能的功率谱密度如图9所示,其中:φ(·)为功率谱密度;f为频率.从图9可以看出:混合电磁主动悬架系统能够有效降低全频段车身加速度与悬架动挠度的功率谱密度,但会增加高频段的车轮动载荷功率谱密度,该结果与文献[13]的结论一致,即改进天棚控制在高频段对车轮的控制效果与被动控制接近.该结果证明了所选取的改进天棚控制参数的合理性.
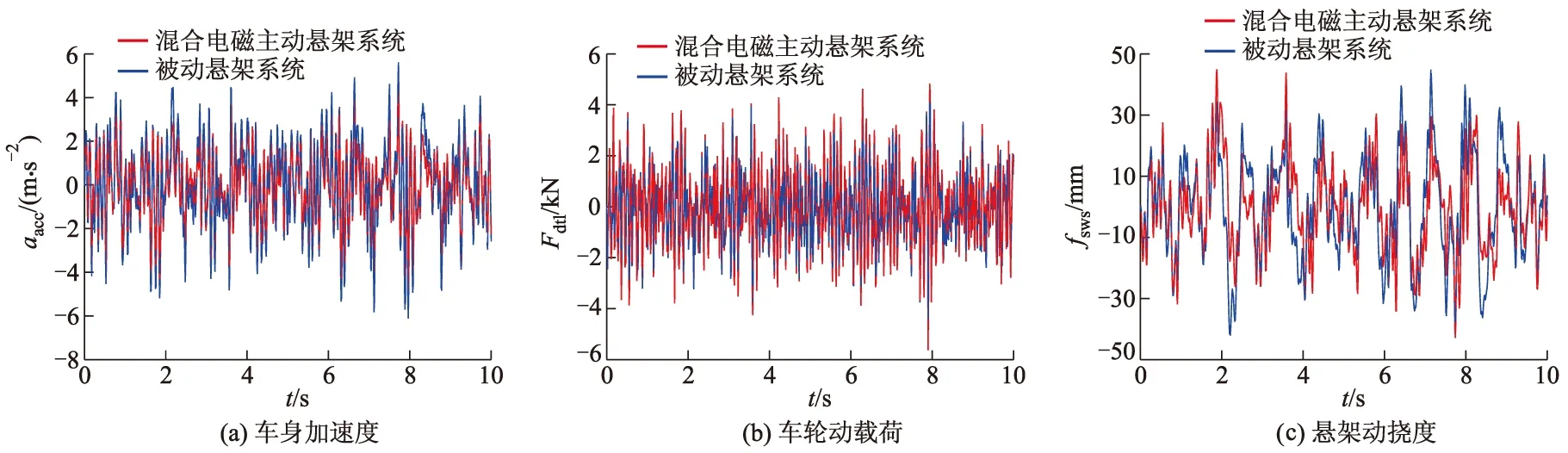
图8 时域动力学性能对比结果

图9 频域动力学性能对比结果
混合电磁主动悬架与线性电磁主动悬架中直线电动机消耗的电功率如图10所示.

图10 直线电动机能耗对比
从图10可以看出:混合电磁主动悬架中直线电动机消耗的电功率明显小于线性电磁主动悬架,两者电功率均方根值(见式(7))分别为10.9,18.6 W.也就是说,在获得相同动力学控制效果的前提下,混合电磁主动悬架消耗的电功率相较于线性电磁主动悬架降低了70.6%,该结果证明了理论分析(节能机理)的正确性以及混合电磁主动悬架在兼顾系统动力学性能与系统能耗方面的优越性.
4 结 论
1) 基于改进天棚控制,得到了混合电磁主动悬架节能机理及其节能方法,即被动阻尼能够分担与悬架速度相关的部分被动作用力,适当的被动阻尼能够降低不同行驶工况下的系统能耗.
2) 选取改进天棚控制参数cp=1 kN·s·m-1,csky=2 kN·s·m-1作为C级路面的控制参数,进行了对比试验,结果表明:相较于被动悬架,混合电磁主动悬架在确保车轮与地面具有良好接触的前提下,车身加速度和悬架动挠度均方根值分别降低了23.35%和14.97%;相较于线性电磁主动悬架,在获得相同动力学控制效果的前提下,混合电磁主动悬架消耗的电功率降低了70.60%,验证了混合电磁主动悬架在兼顾系统动力学性能与系统能耗方面的优越性.
