船舶除漆爬壁机器人永磁吸附装置的分析
2020-11-21张春光杨煜兵张俊峰李上青刘佳慧刘嘉瑞
□ 安 磊 □ 张春光 □ 褚 帅 □ 杨煜兵□ 张俊峰 □ 李上青 □ 刘佳慧 □ 刘嘉瑞
沈阳仪表科学研究院有限公司 沈阳 110043
1 分析背景
为了延长船舶的使用寿命,需要定期对船舶进行维修,除漆是船舶维修过程中必不可少的一个环节。国内各大修船企业普遍采用的除漆方法是人工干喷砂除漆,存在污染严重、高空作业危险、尘肺病危及健康、劳动强度大等弊端[1]。为了消除人工干喷砂的各种弊端,设计了船舶除漆爬壁机器人。船舶除漆爬壁机器人按照不同的行走方式可以分为履带式、轮式、步行式,按照不同的吸附方式可以分为真空吸附式、磁吸附式、推力吸附式[2-5]。笔者分析的船舶除漆爬壁机器人采用轮式行走方案,永磁体与船舶钢板壁面间产生磁力,使船舶除漆爬壁机器人吸附在船体表面上,通过高压往复泵机组获得高压水进行除漆作业。
永磁吸附装置是船舶除漆爬壁机器人的重要子系统,需要兼顾船舶除漆爬壁机器人的可靠吸附和灵活运动,安装在行走部减速机安装板下方,与船舶钢板壁面间具有一定的气隙。笔者对船舶除漆爬壁机器人永磁吸附装置进行磁场分析,得出磁感应强度、磁场强度、吸附力的分布规律,以及在不同气隙和船舶钢板厚度下的吸附力变化规律。
2 永磁吸附装置结构
笔者根据设计要求对船舶除漆爬壁机器人进行了初步设计,如图1所示。

▲图1 船舶除漆爬壁机器人
船舶除漆爬壁机器人的行走部如图2所示。船舶除漆爬壁机器人在左右两侧各有一个行走部,每个行走部有两个轮胎,置于行走部两侧,在两个轮胎间有一条皮带起防护作用。驱动系统主要包括伺服电机和减速机,安装在两个轮胎间。永磁吸附装置安装在减速机安装板下方。
船舶除漆爬壁机器人永磁吸附装置如图3所示。永磁吸附装置由永磁体、铝合金板等组成。永磁体有五块,通过螺钉安装在铝合金板上。铝合金板通过螺钉安装在减速机下方。永磁体与船舶钢板壁面间有一定的气隙,船舶除漆爬壁机器人通过永磁体与钢板壁面的吸附力吸附于船舶表面。
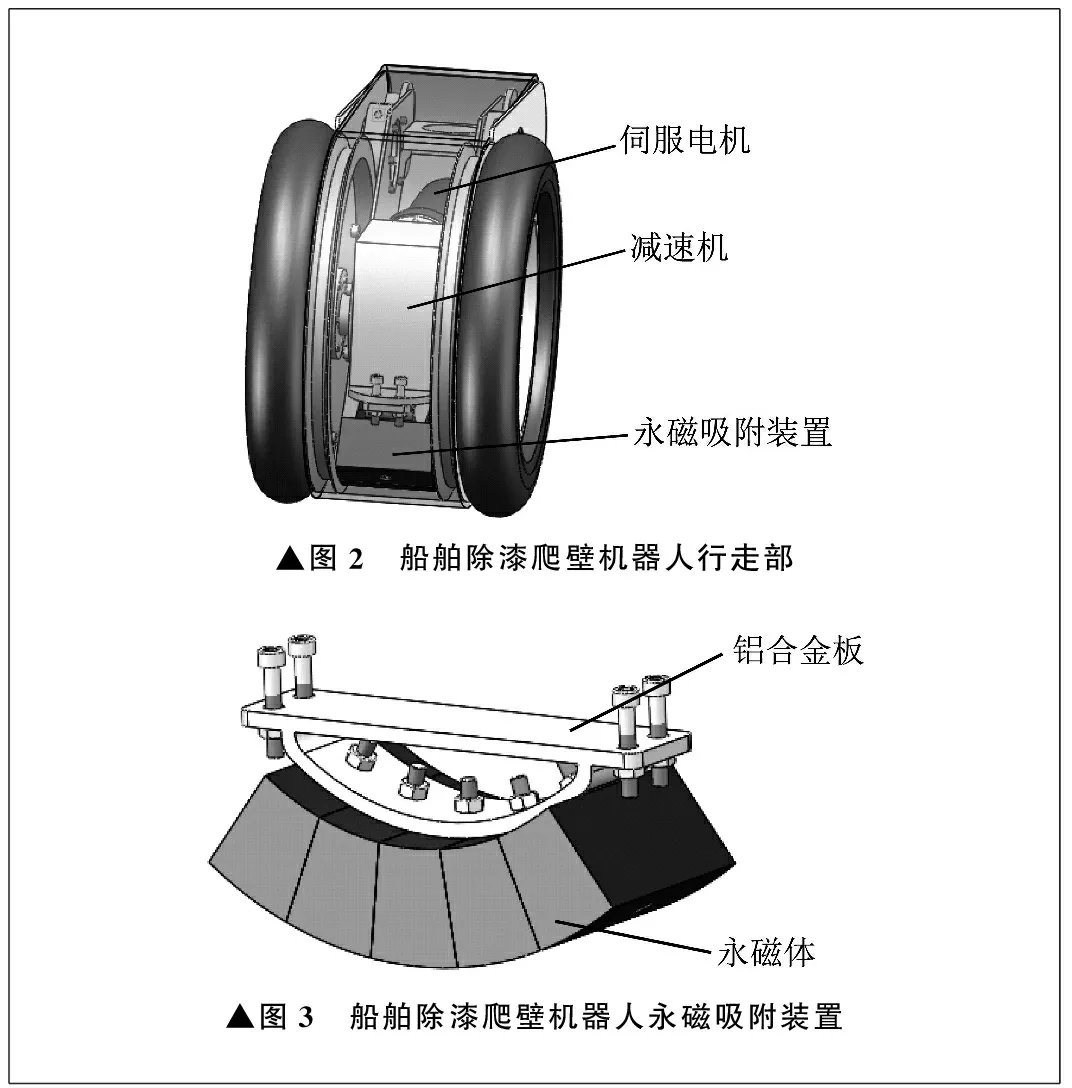
▲图2 船舶除漆爬壁机器人行走部▲图3 船舶除漆爬壁机器人永磁吸附装置
3 磁场理论分析
电磁场的理论基础是麦克斯韦方程组,永磁体产生的磁场为静态磁场,计算同样需要满足电磁场基本理论。另外,在磁场理论分析中还需要引入本构方程和边界条件[6-8]。
磁路高斯定理为:
(1)
安培环路定理为:
(2)
本构方程为:
B=μH
(3)
式中:▽为哈密顿算子;B为磁感应强度;H为磁场强度;J为电流密度;μ为介质磁导率。
引入矢量磁位A,令:
B=×A
(4)
根据库伦规范,可知:
(5)
根据式(2)~式(5),可得:
(6)
在直角坐标系中展开,得到:
(7)
(8)
(9)
由式(4)可得:
(10)
(11)
(12)
式中:Hx、Hy、Hz依次为磁场强度在X轴、Y轴、Z轴方向上的分量;Bx、By、Bz依次为磁感应强度在X轴、Y轴、Z轴方向上的分量;Jx、Jy、Jz依次为电流密度在X轴、Y轴、Z轴方向上的分量。
根据麦克斯韦张力法,作用在磁体上的吸附力F可用张力张量T的面积分计算:
(13)
式中:S为包含永磁体的闭合面;n为面积dS的外法线方向单位矢量;μ0为空气磁导率。
以上为永磁体磁场的理论分析方程,但是在工程实践中较难得到问题的解析解,对此通常采用有限元法等数值解法得到数值解。
4 有限元分析
静态磁场有限元分析有二维平面分析和三维实体分析两种方法,三维实体分析虽然运算速度较慢,但是应用范围广,结果更接近真实情况,因此笔者采用三维实体分析方法。由式(13)可知,永磁体外需要一个闭合面,因此建立包含永磁吸附装置和船舶钢板的空气域,空气域的体积需要达到永磁体体积的3倍以上,如图4所示。
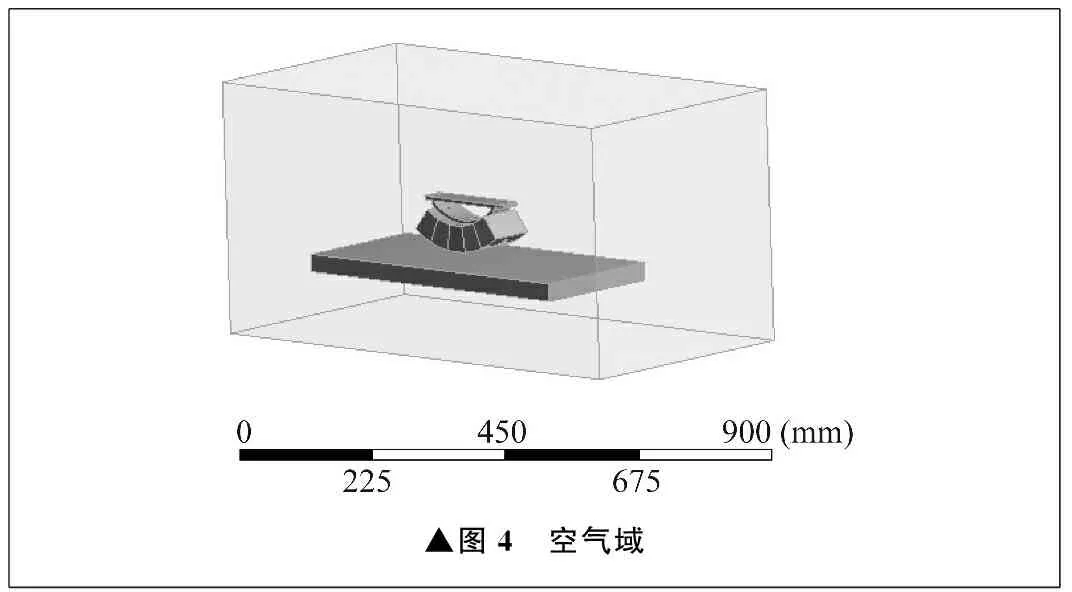
▲图4 空气域
永磁吸附装置磁场有限元分析中涉及的材料主要有永磁体、铝合金板、船舶钢板和空气,如图5所示。
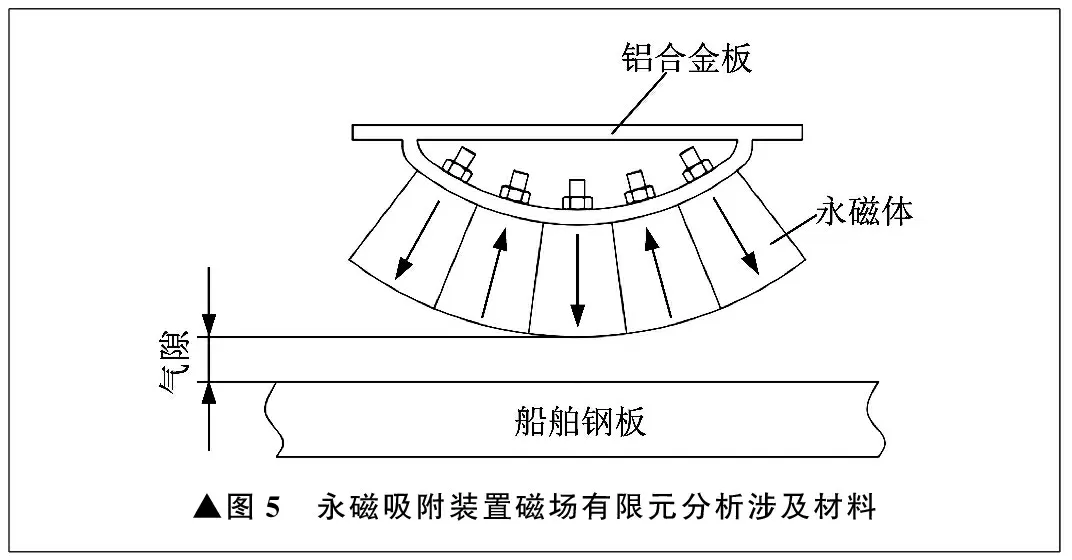
▲图5 永磁吸附装置磁场有限元分析涉及材料
永磁体采用N35稀土系永磁材料钕铁硼[9],外形为扇形,内外半径分别为105 mm和150 mm,夹角为15°,极化方向沿永磁体厚度方向,且相邻永磁体极化方向相反。永磁体主要性能参数见表1[10]。

表1 永磁体主要性能参数
铝合金板上除安装永磁体外,还可以起隔磁作用。铝合金板相对磁导率为1。船舶钢板处于不饱和工作状态,相对磁导率设为3 000,空气相对磁导率设为1。
永磁体布置受到空间结构限制,因此主要对不同气隙和不同船舶钢板厚度下的磁场进行仿真。由于行走部中的皮带处于永磁体和船舶钢板之间,因此气隙最小值在5~16 mm之间,每隔1 mm进行仿真。船舶钢板厚度取10 mm、30 mm,对两种船舶钢板厚度下的磁场进行仿真。
船舶钢板厚度为30 mm,气隙为16 mm时,永磁吸附装置永磁体产生的磁场磁感应强度、磁场强度、吸附力分布云图如图6所示。由图6可知,磁场的磁力线主要分布在瓦形永磁体的径向方向,在宽度方向和周向方向磁力线较少,铝合金板上方磁力线较多,但数值很小,吸附力的最大值位于永磁体和船舶钢板间的气隙处。
船舶钢板厚度为30 mm和10 mm时永磁吸附装置吸附力与气隙关系曲线如图7所示。由图7可知,永磁吸附装置吸附力随着永磁体和船舶钢板间气隙的减小而单调增大。船舶钢板厚度为30 mm时,气隙5 mm对应吸附力为气隙16 mm对应吸附力的3.02倍。船舶钢板厚度为10 mm时,气隙5 mm对应吸附力为气隙16 mm对应吸附力的3.42倍。可见,永磁吸附装置的吸附力受永磁体与船舶钢板间气隙的影响较大。当气隙相等时,船舶钢板厚度越大,永磁吸附装置的吸附力越大。
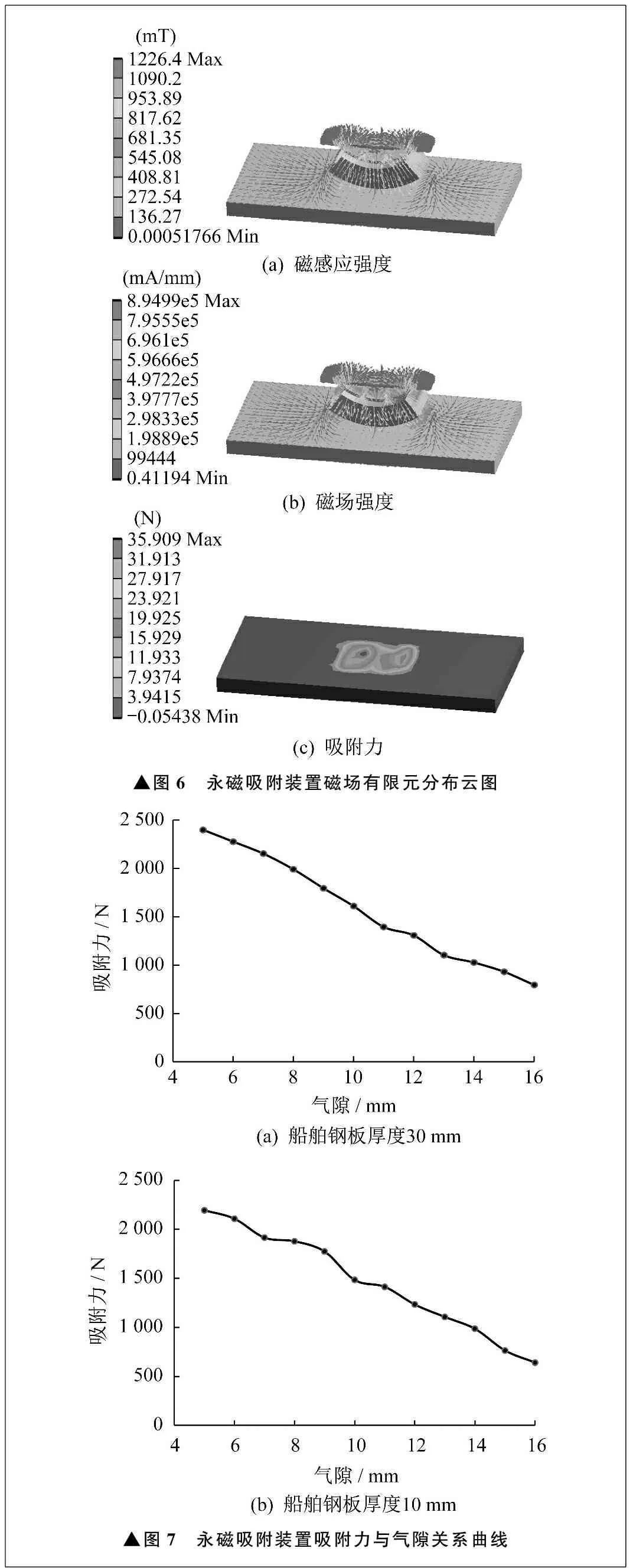
▲图6 永磁吸附装置磁场有限元分布云图▲图7 永磁吸附装置吸附力与气隙关系曲线
相等气隙下,船舶钢板厚度为30 mm和10 mm时永磁吸附装置吸附力的比值在1~1.24范围内,可见船舶钢板厚度虽然对永磁吸附装置的吸附力有一定影响,但是影响相对较小。
5 结束语
笔者以船舶除漆爬壁机器人的永磁吸附装置为研究对象,对永磁吸附装置的磁感应强度、磁场强度、吸附力进行了有限元分析,研究了气隙、船舶钢板厚度等参数与吸附力的关系。研究表明,气隙对永磁吸附装置吸附力的影响较大,船舶钢板厚度对吸附力虽有一定影响,但影响相对较小。仿真分析为船舶除漆爬壁机器人的理论计算提供了参考,并验证了船舶除漆爬壁机器人设计的合理性。
