基于天宝R8 基准站的手持机RTK 精度分析
2020-11-21张贵豪陈普智
张贵豪,陈普智
(黄河水利职业技术学院,河南 开封 475004)
0 引言
全球导航卫星系统(Global Navigation Satellite System,简称GNSS)被广泛地应用于控制测量、变形监测和精密工程测量等方面[1]。GNSS 手持机采用高度一体化设计,具有美观、小巧、轻便、实用的优点,支持传统手持机航点、 航线和航迹记录、 编辑等操作,内置世界大地坐标系WGS-84(World Geodetic System-84)、北京54 坐标系统和西安80 坐标系统,同时支持用户自定义坐标系统,满足个性化需求,支持七参数录入, 已被广泛应用于大地测量、 地质调查、资源勘查等众多领域[2]。 GNSS 手持机的具体应用为:在国土资源管理和利用方面,可以用于宗地测量、土地变更调查、土地现状调查、矿业核查等工作;在环境保护和治理方面,可以用于污染源定位、污染面积调查、环境监测规划等工作;在石油地质勘探方面,可以用于地质界线数据采集、输油管线采集、管线巡检、地质填图等工作;在林业领域,可以用于林业资源调查、林业权属执法、林权纠纷调解、造林规划等工作;在农业领域,可以用于基本农田调查、土壤侵蚀调查、农村承包地测量、精准农业、农业病虫害监测等工作;在电力行业,可以用于电力GIS 数据采集、电力资产管理、电力巡检等工作;在燃气供应行业,可以用于燃气GIS 数据采集、燃气资产管理、管线定位、巡检等工作;在军事领域,可以用于布防、侦察、指挥、通讯、拉练、巡逻等工作。 此外,GNSS 手持机还广泛应用于铁路、通信、海洋、气象、交通、科研、旅游、民政、保险税务等行业。
GNSS 手持机的推出是GNSS 技术应用的重大里程碑,它的出现为工程放样、地形测图、各种控制测量带来了新的测量原理和方法, 极大地提高了作业效率。 笔者试对Trimble GeoXH6000 手持机与天宝R8 GNSS 基准站组合成的手持机RTK 系统进行分析研究, 并通过具体的实验, 分析基于天宝R8 GNSS 基准站的手持机RTK 数据的精确度及可靠性,以期为以后工程建设的应用提供参考。
1 GeoXH6000 手持机与天宝R8 基准站的相关原理
1.1 GeoXH6000 手持机的特点与技术指标
Trimble GeoXH6000 手持机带有实时的分米精度(10cm), 支持多种差分方式, 如: 星基增强系统(Satellite Based Augmentation System, 简称SBAS)、连续运行参考站(Continuously Operating Reference Stations,简称CORS)、虚拟参考站(Virtual Reference Station,简称VRS)、信标、后处理等,配备功能强大的数据采集软件, 并支持第三方软件[3-4]。Trimble Geo XH 6000 内置的天线同时支持全球定位系统 (Global Positioning System, 简称GPS)和GNSS 的双频信号, 使用了天宝H-Star 技术和FloodLight 卫星遮挡降低技术。
H-Star 技术是Trimble Geo XH6000 手持机的主要优势[5]。 H-Star 技术是将先进的GNSS 接收机技术、外业采集软件技术、复杂的数据记录技术以及内业数据处理软件技术有机结合的一种新技术,使用该技术可以用更短的时间、更低的花费、更简便的工作流程实现更高精度的GNSS 数据采集。 H-Star 技术的本质可以归纳为数据质量的改善、 预估后处理精度(Estimated Post-processing Accuracy,简称PPA)所带来的工作流程的改进、H-Star 差分后处理3 个方面。
树木和建筑物常常遮挡卫星, 限制了高精度GNSS 数据的获取, 降低了数据精度的可靠性。GeoXH6000 手持机采用了创造性的Floodlight 技术,可以在树丛中、建筑物附件中和普通GNSS 接收机不能正常定位的地方进行定位。
Floodlight 关键技术在于应用了格洛纳斯GLONASS(俄语“全球卫星导航系统Global Navigation Satellite System”的缩写)卫星,增加了可见卫星颗数。 它还应用先进的电子设计,使得GeoXH6000对较弱的卫星信号有很好的接收处理能力。 此外,GeoXH6000 引入了气压计,可以通过气压与高程的关系, 来辅助GNSS 的精度控制。 实验证明,Floodlight 技术极大地提高了使用效率。
GeoXH6000 手持机提供了定位所需的精度和速度,带有实时的无需等待的分米级精度(10 cm),可以方便快捷地确定所在位置, 其标称精度如表1所示。
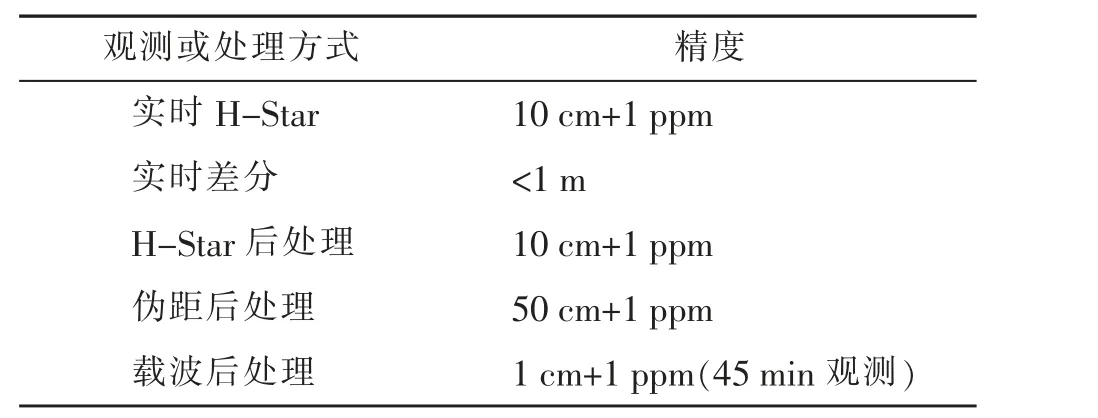
表1 差分改正后的精度指标Tab.1 Precision index after difference correction
GeoXH6000 手持机提供了多种数据通讯方式,如虚拟参考站VRS 网络、蜂窝网络电话、自设基站等[6]。不同差分源和通信链路的通信方式如表2 所示。

表2 不同差分源和通信方式对比Tab.2 Comparison of different difference source and communication ways
1.2 天宝R8 GNSS 测量系统
天宝R8 GNSS 测量系统是一款多通道、多频带的集接收机、天线和数传电台于一体的GNSS 系统。该系统支持GNSS 的Trimble R-跟踪技术。 Trimble R-跟踪技术基于一个全新增强性RTK 解算, 既支持现代化的GPS L2C 和L5 信号,也支持GLONASS L1/L2 信号。
天宝R8 GNSS 测量系统可以与GeoXH6000 手持机通过GPRS/CDMA 网络进行数据传输。
1.3 基于天宝R8 GNSS 基准站的手持机RTK 原理
RTK 是利用载波相位差分GNSS 技术实现实时定位测量。 差分GNSS 技术是利用基准站与流动站之间空间的相关性来进行差分改正的, 可以减小定位的误差。
在R8 GNSS 测量系统与GeoXH6000 手持机组成的手持机RTK 系统里,R8 GNSS 测量系统作为基准站使用,GeoXH6000 手持机则作为移动站使用。
R8 基准站在接收GNSS 卫星数据的同时,将接收的数据传输给GeoXH6000 手持机,GeoXH6000手持机则是同时接收卫星数据和R8 基准站传输的数据,并对数据进行差分处理,从而得到高精度定位数据。 基于天宝R8 GNSS 基准站的手持机RTK 流程如图1 所示。
2 基于天宝R8 GNSS 基准站的手持机RTK 数据采集与处理
2.1 外业数据采集
采集数据时, 所选测量点位应尽量避免在一条直线上。
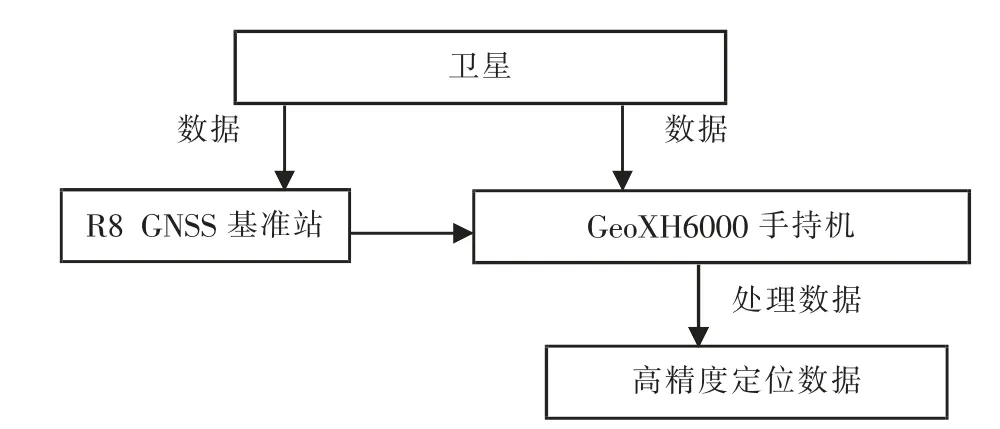
图1 基于天宝R8 GNSS 基准站的手持机RTK 流程图Fig.1 Flow of handheld handset RTK based on Trimble R8 GNSS base station
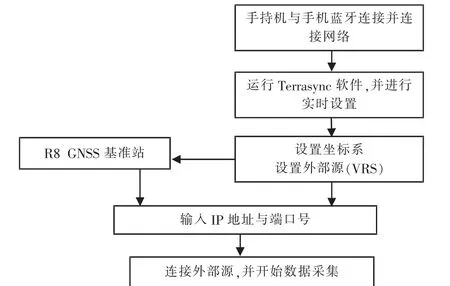
图2 基于R8 GNSS 基准站的手持机数据采集流程图Fig.2 Flow of handheld handset data collection based on R8 GNSS base station
外业数据采集流程如图2 所示, 具体工作步骤为:(1)将天宝R8 GNSS 基准站安置在已知点,并进行 对 中 整 平, 量 取 仪 器 高。 (2) 将 检 定 过 的GeoXH6000 手持机与装有用户识别卡(Subscriber Identity Module,简称SIM)的手机通过蓝牙技术连接。由于SIM 卡能够利用GPRS 数据流量上网,因此与手机连接以后的GeoXH6000 手持机可以通过数据流量与互联网相连。(3)运行Terrasync 软件,将事先定义的坐标系统传输到GeoXH6000 手持机中,并设置选中,再将实时设置对话框打开,选择等待实时状态和外部源,在外部实时设置对话框中,键入天宝R8 GNSS 基准站IP 地址和相应的COM 端口号。(4)对Terrasync 软件进行设置,选中外部源并连接到外部源。 (5)创建试验项目文件,进行数据采集。 为了对比高程,采集数据时,应将手持机天线相位中心位置直接放置在要采集的点位上。 (6)当所有外业数据采集完成以后, 用GPS Pathfinder 软件将数据导出(需要先将Terrasync 软件退出)。 然后,在GNSS 后处理软件中,进行数据处理。
由于GeoXH6000 手持机的坐标系统是世界大地坐标系WGS-84,因此,需要采用布萨尔七参数法或四参数法进行点校正,将WGS-84 坐标系校正为北京54 坐标系。
2.2 数据处理与精度分析
本次试验是对黄河水利职业技术学院校内布置好的点位进行数据采集,具体研究方案为:(1)试验前,对测量仪器的稳定性进行检测。通过对同一点进行多时段的重复观测,检测仪器的稳定性[7]。 (2)采用布萨尔七参数法进行点校正,将GeoXH6000 手持机与天宝R8 GNSS 基准站连接,对点位进行坐标测量。 为保证数据的精确性,在测量过程中,用天线对中杆进行严格对中。 (3) 采用GeoXH6000 手持机RTK 实时差分改正数据采集模式完成外业数据采集,之后,将采集数据通过电缆线传输到计算机中,进行数据处理。 (4)将GeoXH6000 手持机测量的点位坐标与已知坐标进行对比,求点位误差。本试验测得各点位误差如表3 和表4 所示。
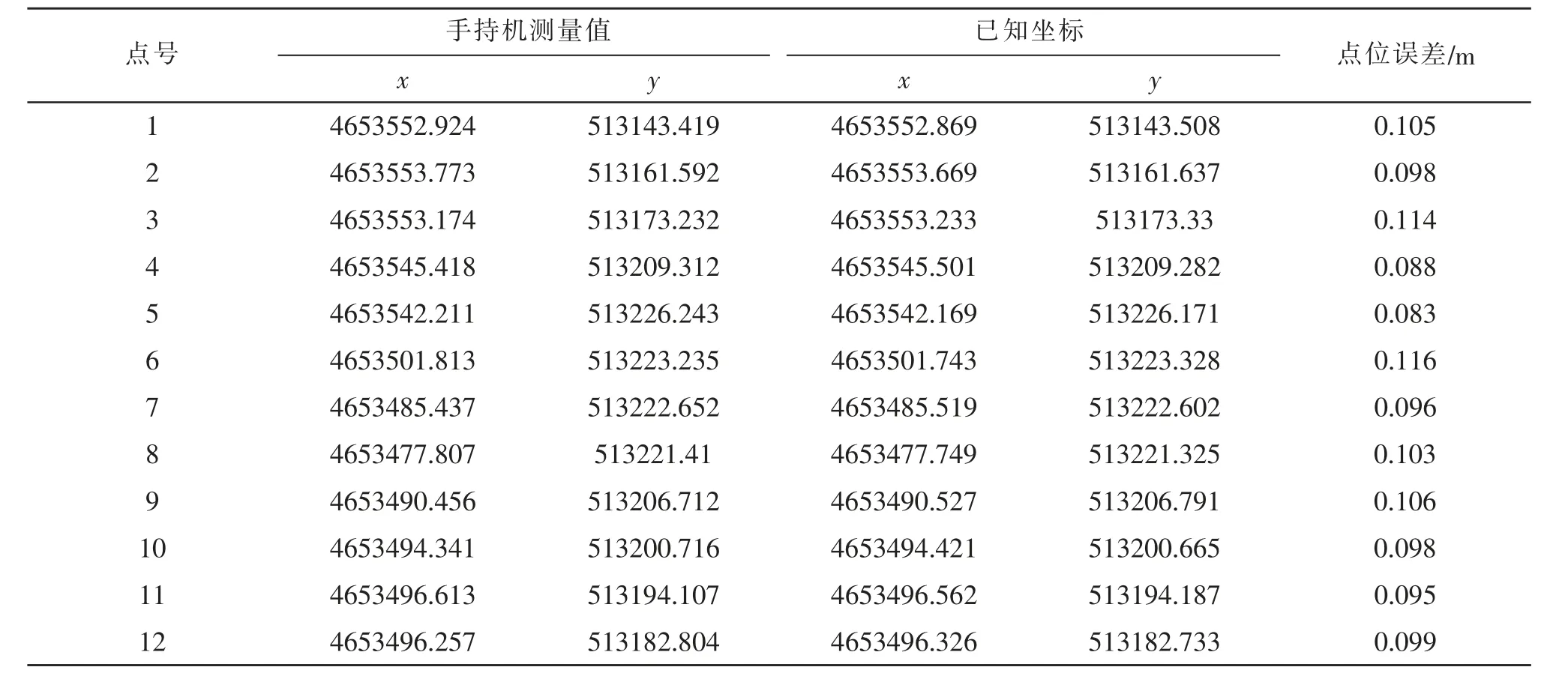
表3 平面坐标及误差Tab.3 Plane coordinate and error
从表3 可知,最大点位误差为0.116 m,最小点位误差为0.083 m,平均点位误差为0.100 m。 经计算,手持机测量值相对于已知点的中误差为±0.100 m[8]。
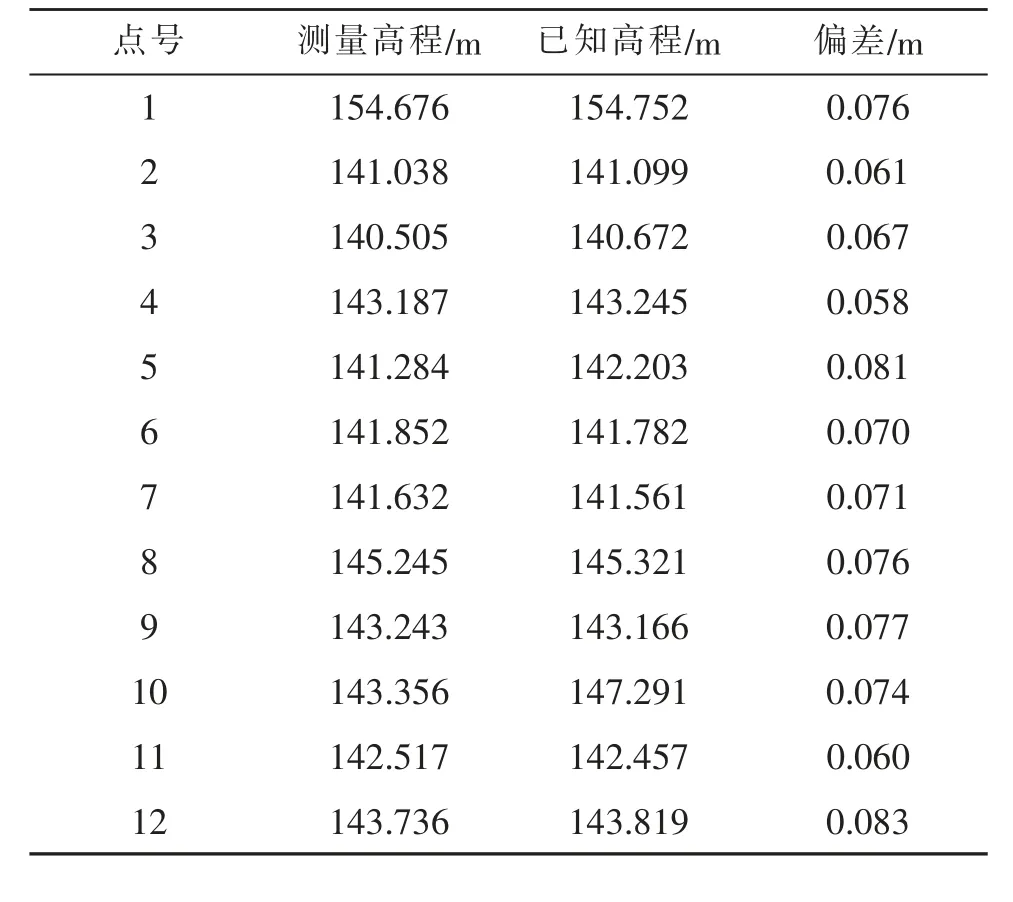
表4 高程坐标及平均值Tab.4 Elevation coordinate and average value
经计算, 手持机高程测量值相对于已知点高程的中误差为0.069 m[9]。
3 结语
基于H-Star 技术和Floodlight 卫星遮挡降低技术的GeoXH6000 手持机, 能够接收和计算RTK 改正数据,实时差分定位精度可以达到亚分米级,与传统手持机的亚米级采集模式相比, 其在GIS 外业数据采集以及一定的工程测量中更具有优势。 将GeoXH6000 手持机与天宝R8 GNSS 基准站连接,可利用GPRS/CDMA 移动流量数据进行数据传输,这与传统的无线电台数据传输模式相比, 在一定程度上减少了数据质量的衰减,同时使用GPRS/CDMA 移动数据流量具有经济性。 与传统RTK 相比,基于天宝R8 的GeoXH6000 手持机便于携带,提高了工作效率。 但是,采集数据过程中,手持机天线相位中心对中时,容易出现人为误差。在具有连续运行参考站(Continuously Operating Reference Stations,简称CORS)的地区,可以用CORS 站代替自设的基准站。 对于电力测量、线路工程测量、GIS 数据采集以及要求一定精度的测图工作, 实时定位高达10 cm 精度的GeoXH6000 手持机是最佳选择。 但它的高程精度无法满足高精度工程的使用要求, 还需进一步改良。
