基于改进模糊控制算法的光伏系统中MPPT控制策略
2020-11-20周宏飞杨旭海赵咪耿智化张茜
周宏飞,杨旭海,赵咪,耿智化,张茜*
(1 石河子大学机械电气工程学院,新疆 石河子 832003;2 农业部西北农业装备重点实验室,新疆 石河子 832003)
光伏发电作为一种新能源的利用方式,在社会生产中发挥着重要的作用。光伏发电发展的关键问题之一是如何提高能量利用率,运用MPPT控制器是降低运行成本提高发电效率的最直接、最有效的方法[1-5]。目前,常用的MPPT算法主要有恒定电压法[6-7]、扰动观察法(P&O)[8-10]、电导增量法(INC)[11-13],与前2种方法相比,电导增量法有更好的响应速度、控制精度。YILMA U等[14]提出了一种基于梯度变步长的电导增量法,该算法易操作、跟踪时间短,但该程序编写复杂且输出功率不稳定;杨旭红等[15]提出一种改进电导增量法的MPPT控制策略,该方法显著加快了跟踪速度,但输出功率震荡幅度大,对硬件要求比较高;刘明亮等[16]提出基于变步长电导增量法的自适应MPPT控制算法,从某种程度上减小了外界环境急剧变化下传统电导增量法再次跟踪MPP速度慢、步长选择不当误判的问题。
以上研究表明,改进的电导增量法在辐照强度变化不大的情况下跟踪速度快、控制精度高,但辐照强度急剧变化时,电导增量法无法精确地找出最大功率点,输出功率损失很大,严重时还会导致电网系统崩溃。近年来,由于模糊控制技术的成熟,更适应于光伏电池输出功率这样的非线性系统,将模糊控制应用于MPPT中逐渐成为研究热点[17-18]。本文以模糊控制方法结合梯度式变步长电导增量法的控制策略,搭建MPPT模型,通过理论分析和Matlab仿真验证模型的正确性。
1 基于模糊控制-电导增量法原理
本文采用的改进算法有2个步骤,第1步是对光伏系统使用模糊控制方法使光伏电池快速达到平衡状态,使电池工作在最大功率点附近,提高系统的响应速度,第2步是对光伏系统使用梯度式变步长电导增量法使光伏电池工作在MPP处,减少功率的震荡幅度。
1.1 模糊控制法
模糊控制器通常采用双输入单输出模型,一般选取误差信号E和误差变化率EC作为模糊控制器的输入变量,而把受控变量的变化作为输出变量[19]。本文中模糊控制系统的输入变量为功率变化量En、前一时刻的步长Dn-1,输出变量为当前时刻的输出步长Dn。
根据模糊控制参数的设定经验,将模糊控制语言变量分别定义为:
En={NB,NM,NS,NO,PO,PS,PM,PB},
Dn-1={NB,NM,NS,PS,PM,PB},
Dn={NB,NM,NS,PS,PM,PB},
其中,En的论域范围为[-8,+8],Dn-1的论域范围为[-8,+8],Dn的论域范围为[-5,+5],NB、NM、NS、NO、PO、PS、PM、PB分别表示为负大、负中、负小、负零、正零、正小、正中、正大。通过定义输入、输出模糊集数量,共形成48条规则;模糊控制语言规则的一般形式为:如果“前提”,那么“结论”(If…Then…)。根据确定的模糊控制规则建立模糊控制规则表,见表1。

表1 MPPT模糊控制规则表
本文解模糊方法为重心法,模糊逻辑工具箱选择mamdani型控制器,选择聚类方法为max,推理方法为min,选择“并”方法为max,“交”方法为min。通过Matlab中GUI界面构建MPPT控制器的隶属函数,选择三角形作为隶属函数的形状[20]。
模糊控制器的控制方法如下:当Dn-1大于0且En远大于0,U
应用模糊控制算法寻找光伏系统最大功率点有以下优点:一是模糊控制对变步长的控制,避免了固定步长的震荡,控制规则具有相对的独立性,使得控制效果优于常规控制;二是其动态性能效果好,鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,表现出较强的局部搜索能力。其不足主要在于定义模糊集、确定隶属函数、模糊规则以及解模糊的选择等关键环节都要依靠设计人员的直觉和经验。
1.2 梯度式变步长电导增量法
梯度式变步长电导增量法的基本原理是通过改变电路的占空比D来改变系统的输出电压,使系统工作在最大功率点[21]。
本文控制策略选取step=|M|*dP/dU作为电压调整步长的依据,在当前工作点偏离最大功率点较远时,加大跟踪步长,提高响应速度,而在当前工作点在最大功率点附近时,减小跟踪步长,以减小功率的震荡损失。本文在Matlab/Simulink中使用S函数,通过设置合适的M值,仿真调整决定最终的取值。
1.3 模糊-电导控制模式
模糊控制和梯度式变步长电导增量法在寻找MPPT上各有优势,模糊控制初步寻优时间短,梯度式变步长电导增量法精度高、震荡小,本文将2种算法结合,实现MPPT优化控制。2种算法的具体使用方法如下:光伏电池开始工作时,使用模糊控制算法,使工作点快速达到并稳定在0.75Umax,然后使用梯度式变步长电导增量法对工作点作进一步调整,稳定在最大功率点处。具体控制流程如图1所示。

图1 模糊-电导控制法流程图
光伏电池开始工作时,模糊控制开始初步寻优,以模糊规则不断对输出电压扰动,将电压稳定在0.75Umax,以此作为2种算法的分界处。在梯度式变步长电导增量法处,若dU=0且dI=0时,光伏电池工作在最大功率点,不需改变;若dU=0且dI≠0时,则分为2种情况:第1种是当dU=0且dI>0时,说明光照强度增加,光伏电池工作在最大功率点左侧,则需要增大电压,第2种是当dU=0且dI<时,光伏电池工作在最大功率点右侧,则需要减少电压;若dU≠0,分为3种情况:第1种是dI/dU>-I/U时,光伏电池工作在最大功率点左侧,则需要增大电压,第2种是dI/dU<-I/U时,光伏电池工作在最大功率点右侧,则需要减小电压,第3种是dI/dU=-I/U时,系统工作在最大功率点。
根据以上方法对整个光伏系统的输出电压判别,通过改变占空比D改变输出电压,最终工作在最大功率点。应注意的是,上述方法针对的是阴影位置固定情况下的MPPT,而工程实际中阴影的位置可能是不固定的,这时上述方法就可能失效,故需要对其进行进一步改进。由于阴影的出现,存在突变和渐变2种情况,为使光伏组件能够及时跟踪到最大功率点,需要使系统识别突变和渐变2种情况。
2 仿真验证与结果
陈力改进的电导增量法[22]使功率的震荡幅度控制在0.5 W内,在仿真的数据上较先进;王亚楠改进的模糊控制策略[23]使光伏系统的初步跟踪缩小在0.1 s内,并运用在实验中,实验数据可靠、先进。本文借鉴这2种方法使用Matlab/SimulinkR2018a仿真跟踪光伏电池最大功率点,为了验证本文算法的合理性,设置3种不同环境的仿真参数,通过初步寻优的时间T、稳定后功率的震荡幅度ΔP、参数改变后再次跟踪到最大功率点的时间ΔT这3个MPPT性能指标验证本文算法的优势。
本文算法使用20个光伏电池串联发电,仿真模型如图2所示,单个光伏电池参数如表2所示。

图2 光伏控制系统模型
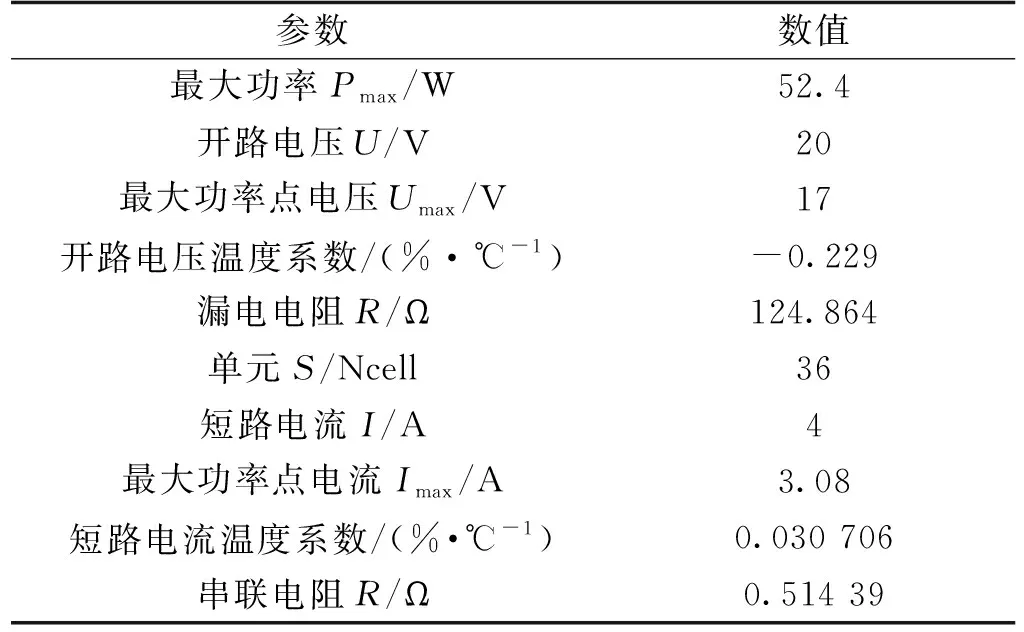
表2 光伏电池参数
2.1 固定光照固定阴影
固定光照情况是一种理想状态,输出曲线为单峰最值。本文设置的光伏输出曲线环境参数为S=700 W/m2,T=25 ℃。对比结果如图3所示。
从图3可知:模糊控制法由于使用专家经验进行制定模糊规则,初步寻优时间T约为0.1 s,功率震荡幅度ΔP约为5 W;梯度式电导增量法初步寻优时间过长,T约为1.2 s,其功率震荡幅度ΔP为0.8 W;模糊-电导控制法结合了2种算法的优点,初步寻优时间T约为0.08 s,功率震荡幅度ΔP约为0.4 W。在标准情况下,模糊控制法有很短的初次跟踪速度,但模糊控制的跟踪精度稍差;相反,电导增量法的功率震荡低,跟踪速度慢,而模糊-电导控制法结合了两者的优点,具有初步寻优速度快、功率震荡幅度小、效率更高的特点。

图3 3种算法跟踪曲线的对比
2.2 光照渐变

本文参考文献[24-25]设定最大时间为1 min,设置的光照变化如图4所示,算法结果如图5所示。

图4 光照变化
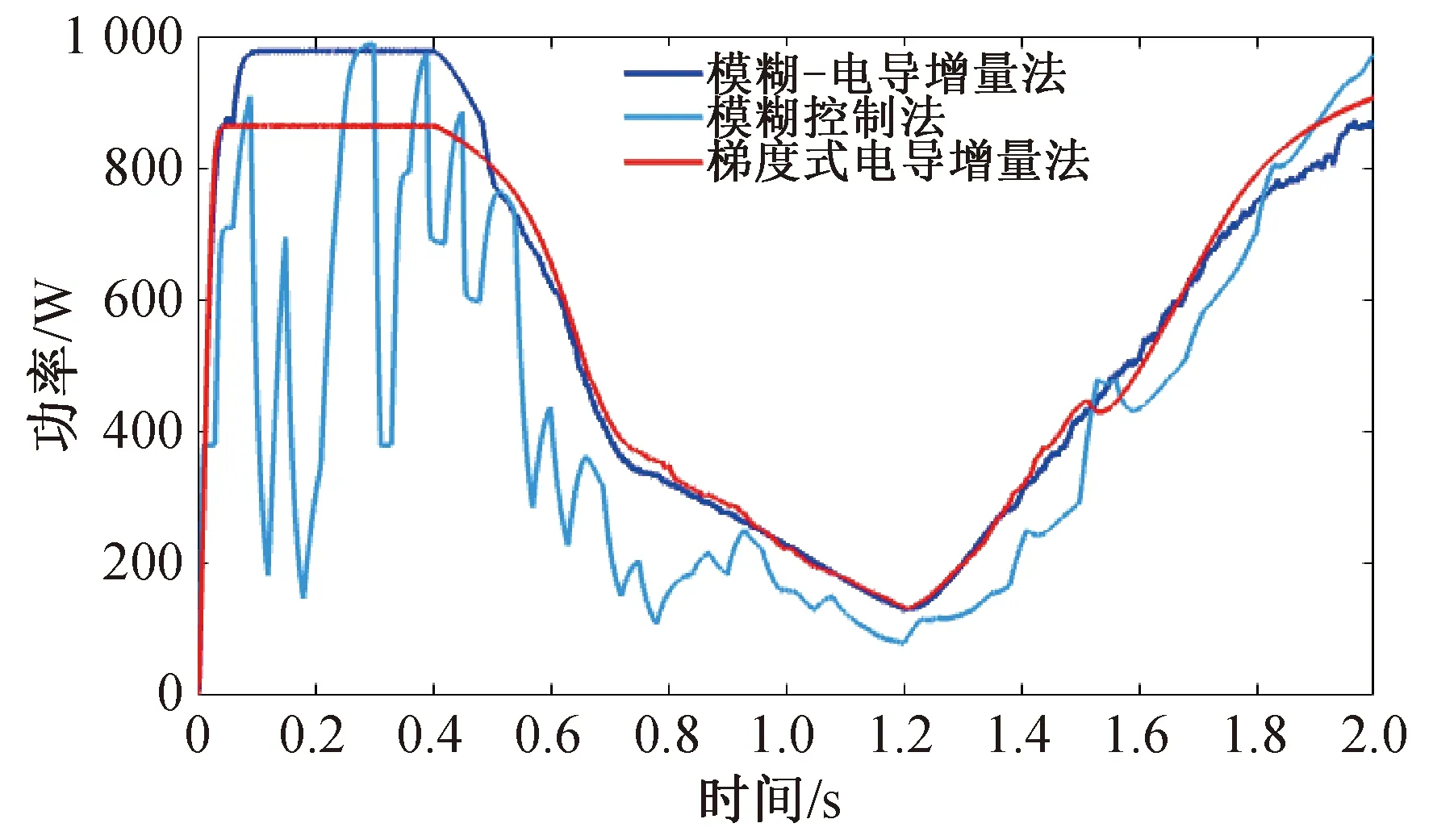
图5 3种算法跟踪曲线对比
从图5可以看出:模糊控制和电导增量法在光照缓慢变化时,曲线波动幅度较大;混合算法在开始跟踪时,模糊控制快速跟踪到0.75Umax处,再以梯度式电导增量法使电压稳定在MPP处,结合2种算法的优势,混合算法在光照渐变时更有优势。
2.3 光照突变
在光照突变状况下,光伏系统的工作点会从一个较高的峰值突降到一个较低的峰值,功率会有较大的落差,这时可通过检测系统功率差的办法来判断阴影的出现。当系统出现较大的功率差时,启用算法更新,此外,在光伏系统初始启动阶段、最大功率点跟踪阶段和负载投切时,功率也有较大波动,但这些功率波动的持续时间都较短,通过简单的“滤噪”程序即可排除。光照突变量如图6所示,仿真对比结果如图7所示。

图6 光照突变量

图7 仿真对比图
从图7可知:在外界环境因素急剧变化下,光照强度时间0~0.4 s间,模糊控制算法的初次跟踪时间比模糊-电导算法快约0.03 s,再次跟踪到最大功率点的时间ΔT>0.02 s,功率震荡幅度ΔP为3.5 W,而模糊-电导算法再次跟踪到最大功率点的时间ΔT为0.02 s,功率震荡幅度ΔP为1.8 W;光照强度时间1.2~2 s间,模糊控制算法的震荡时间更长,比模糊-电导算法慢约0.3 s。从整体变化看,0.07 s时2种控制算法都以模糊控制算法达到0.75Umax,0.07 s后模糊控制算法继续震荡0.14 s才达到最大功率点,而模糊-电导算法进入到梯度式电导增量法仅0.08 s就达到最大功率点。
综上所述,梯度式电导增量法的初次跟踪速度慢,围绕在最大功率点上下波动,对环境因素依赖性很高;模糊-电导混合算法的精确度更好,跟踪速度更快,也验证了所提算法的合理性。
3 结论
(1)单一的传统算法或智能算法不能完全跟踪到最大功率点,各自的优点不能补足缺点造成的损失,通过改进核心控制算法能够提高输出精度。
(2)智能算法因其独特的规则和寻优能力,与传统算法的结合能实现2种算法的优点,弥补各自的缺点,且其输出功率波动幅度小、损失少。
(3)光伏系统搭建模型存在一定的局限性。在实际光伏系统运行时,需要根据具体的环境因素和更多的相关因素,采用更高精度的MPPT控制策略进一步提高系统的精确度和快速性。