基于模型补偿的高速列车状态反馈预测控制
2020-11-19杨辉童英赫付雅婷李中奇
杨辉,童英赫,付雅婷,李中奇
基于模型补偿的高速列车状态反馈预测控制
杨辉1, 2,童英赫1, 2,付雅婷1, 2,李中奇1, 2
(1. 华东交通大学 电气与自动化工程学院,江西 南昌 330013;2. 江西省先进控制与优化重点实验室,江西 南昌 330013)
高速列车运行系统本质上是高度非线性和不确定性的系统,为了弥补建模过程中被忽略或者简化的非线性和不确定性,提高高速列车运行过程的控制精度,提出一种基于模型补偿的高速列车状态反馈预测控制方法。在建模和控制上,分别采用子空间辨识法和状态反馈预测控制法,在此基础上建立BP神经网络在线补偿器,利用高速列车运行过程的状态变量和实际速度作为补偿器的输入,参考轨迹与实际速度之间的差值构成性能指标函数进行在线训练,输出补偿控制力作用于控制系统完成在线补偿,实现高速列车目标速度曲线高精度跟踪控制。仿真实验结果表明,该方法能够提高控制系统的控制精度。
高速列车;子空间辨识法;预测控制;神经网络;在线补偿
中国高速铁路规模虽已排名世界第一[1],但是其面对如何在不断变化的需求下保证高速列车安全、正点,稳定运行的问题是不可忽视的,这对高速铁路技术提出了更高的要求[2−3]。随着高速列车运行速度越来越快,车轮与轨道、受电弓与接触网等相关设备之间的耦合关系逐渐加强,空气阻力所占的比重越来越大,高速列车行驶过程中高度非线性和不确定性的问题愈加凸显,其模型很难用传统的动力学方程描述[4−6]。目前,高速列车的模型研究,大多数都忽略或者简化了非线性和不确定性。上官伟等[7]通过牛顿力学建立高速列车动力学模型,然而高速列车快速行驶中的高度非线性和不确定性很难用传统的动力学方程描述。YANG等[8]建立了高速列车T-S模糊双线性模型,将非线性高速列车模型近似线性化。朱爱红等[9]采用速度、时间、距离和两车间安全距离作为约束条件,建立数学模型,本质上是机理模型,不符合高速列车的实际运行情况。李辉等[10]利用神经网络进行高速列车车外气动噪声预测研究,建立车外气动噪声的神经网络预测模型。为了高精度控制高速列车,HAI等[11]将模糊控制用来设计控制器,提出了一种包含蕴涵逻辑的模糊控制器。李中奇等[12]在广义预测控制的基础上,加入了控制器匹配机制设计控制器,对高速列车运行过程进行控制。高坚[13]提出了基于粒子群算法的PID控制,但是粒子群算法容易陷入局部最优。对于上述研究存在的建模不准确和控制精度需提高的问题,本文提出一种基于模型补偿的高速列车状态反馈预测控制方法。通过高速列车的运行数据,采用子空间辨识法辨识高速列车运行过程的状态空间模型,建立状态反馈预测控制器完成对高速列车的速度跟踪控制,为了降低近似线性化建模以及控制方法导致的速度跟踪误差,加入了BP神经网络在线补偿器,利用BP神经网络的非线性映射能力,在线补偿高速列车运行过程中的控制力,相较于离线神经网络,在线神经网络训练效率高,自适应能力强,能够有效的提高速度跟踪精度,实现高速列车高精度速度跟踪控制。
1 高速列车状态空间模型
1.1 高速列车状态空间模型描述
高速列车在行驶过程中,列车的运行速度决定列车的安全,影响列车是否正点到达。为了保证高速列车运行的安全,使得列车高精度按照给定的目标速度曲线运行,准时到达目的地,需要建立高精度的高速列车系统速度与控制力的动力学模型。
状态空间模型是一种由状态空间分析法对动态系统建立的一种数学模型,鉴于状态空间模型里的状态变量可以很好的描述系统内外部动态特 性[14]。所以,本文运用非线性状态空间模型来描述高速列车的动力学行为:

其中:为运行时间;()为状态向量(与列车、接触网和铁轨的样式,材料和结构等相关参数有关),()为列车的合力,()为列车运行速度,(•)和(•)为非线性向量函数,()和()为随机的不可测噪声向量。
式(1)能够精确地描述高速列车的动态行为特性,但是非线性向量函数计算复杂,求解困难。因此,借助局部建模思想,将式(1)在其平衡工作点近似的看为线性系统,转化成式(2)描述的状态空间模型:

其中:,,,为状态空间模型的系统参数矩阵,()和()分别为过程噪声和输出噪声。辨识状态空间模型以及设计高速列车运行过程控制器,需要假设一些条件:
1) (,)能控,(,)能观,矩阵的特征值在单位圆内;
2)()是确定性的拟平稳序列,与过程噪声()、输出噪声()不相关;
3) 过程噪声()和输出噪声()都为平稳的零均值白噪声序列,并且噪声协方差矩阵为:

其中:条件1) 是为了保证高速列车运行过程的安全和稳定;条件2) 与高速列车运行过程的控制力相关;条件3) 说明了高速列车运行过程噪声干扰方面的统计特性。
1.2 子空间辨识法
基于模型(2),运用子空间辨识法辨识高速列车运行过程状态空间模型的参数矩阵。
根据高速列车运行过程的输入数据,建立Hankel矩阵:

其中:为矩阵的行数;为矩阵的列数,下标为过去,下标为未来。同理可以建立输出数据的Hankel矩阵Y和Y。
将式(2)迭代后得到输入输出矩阵方程:




同理可以建立噪声的Hankel矩阵和。
通过投影法和辅助变量消去式(4)的U,M和N3项[15],得:

求得广义能观性矩阵:

那么,状态矩阵的估计值为:

构建线性方程组,计算系统参数矩阵:

其中:与为相应的残差矩阵。
将式(12)转化为一个最小二乘求解的问题,即:
通过式(13)计算系统参数矩阵估计值,并且可以通过上述最小二乘问题的残差求解协方差矩阵:

2 模型补偿的状态反馈预测控制
根据子空间辨识法,可以离线辨识得到高速列车状态空间模型,但借助了局部建模思想,将非线性状态空间模型转化成了线性状态空间模型,导致实际建立的模型并不完全精确,以致增加控制过程中的误差。所以,为了弥补建模中所忽略的非线性和不确定性,减小控制的误差,在状态反馈预测控制方法的基础上,建立了BP神经网络在线补偿器,补偿控制过程的控制力,提高高速列车速度跟踪精度。
如图1所示,为基于模型补偿的高速列车状态反馈预测控制系统原理框图。

图1 基于模型补偿的高速列车状态反馈预测控制系统原理框图
2.1 状态反馈预测控制器
假设为预测时域,那么()在下一个时刻的预测速度为:




根据单值预测控制算法,设定:


为求得最优控制律,控制偏差最小,其性能指标函数为:


求得最优控制律为:

利用补偿后的总控制力u代替输入到子空间模型中,通过模型(2)更新每个时刻的状态变量,其中()为:


2.2 BP神经网络在线补偿器
2.2.1 BP神经网络在线补偿器工作原理



图2 BP神经网络在线补偿器k时刻训练示意图
Fig. 2 BP neural network online compensator k-time training diagram
2.2.2 BP神经网络在线补偿器设计
在线补偿器算法分为2个过程[16]:正向传播和误差的反向传播。
1)正向传播:






2)反向传播:
在线补偿器在时刻的性能指标函数J为:

利用性能指标函数对权值和阈值求偏导,计算出时刻第次迭代的权值和阈值的改变值,从而得到第+1次的权值和阈值。
那么,权值与阈值的更新策略为:




各个权值的更新算法采用梯度下降法,运用链式法则求得[17],各个权值和阈值的改变量为:


3 仿真与分析
3.1 高速列车建模仿真
采集高速列车实际运行输入输出数据1 200组。其中,将800组数据作为子空间辨识法的建模数据,剩下的400组数据用来检验其模型误差。运用子空间辨识法辨识得到高速列车运行过程的2阶状态空间模型,其参数矩阵以及初始状态向量为:



如图3所示,为子空间辨识法辨识高速列车状态空间模型的模型误差曲线。
从图3中可以看出,子空间辨识法离线辨识得到的高速列车运行过程状态空间模型具有良好的建模精度,模型误差较小,能够很好的辨识出高速列车运行过程的状态空间模型。
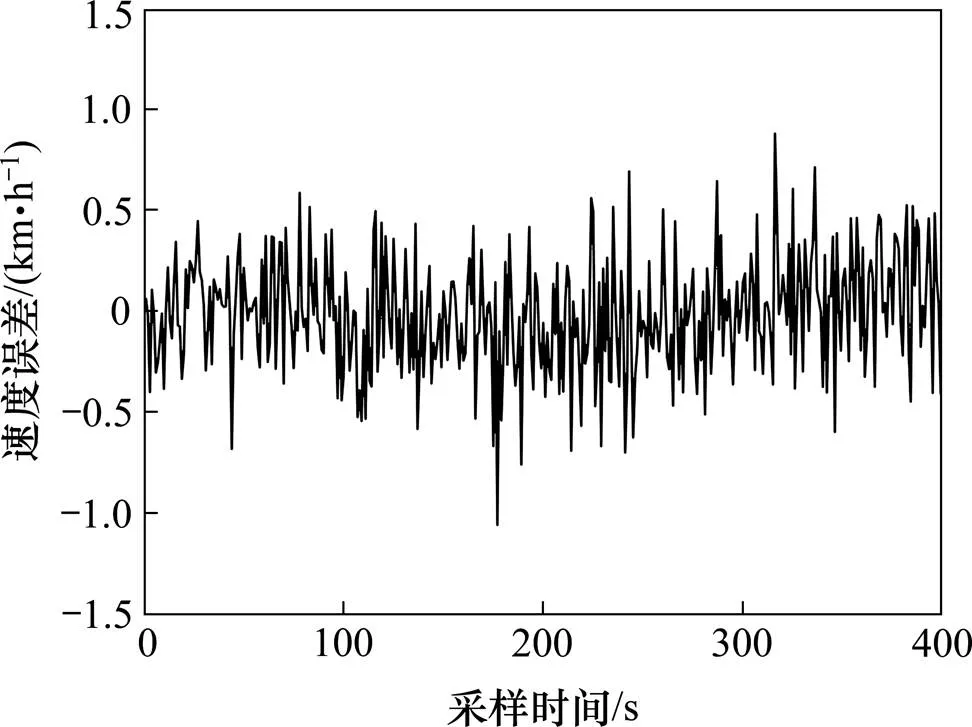
图3 模型误差曲线
3.2 高速列车运行过程控制仿真
基于子空间辨识法得到的高速列车运行过程状态空间模型,运用PID控制(经典的列车运行控制方法)、文献[12]中的广义预测控制、本文的状态反馈预测控制3种方法进行仿真对比实验,验证其算法有效性。设定预测时域=5,控制时域=1,参考轨迹是高速列车实际运行曲线数据。
如图4所示,为PID控制、广义预测控制和状态反馈预测控制(无补偿)的速度跟踪仿真曲线。从图4可以看出,状态反馈预测控制(无补偿)相比于PID控制和广义预测控制更加贴合参考轨迹,能够更好的实现高速列车目标速度曲线跟踪控制。
如图5所示,为图4的速度误差曲线。可以看出,在3种控制方法中,状态反馈预测控制(无补偿)的速度跟踪误差更小,整个控制过程中误差波动平稳,相较于PID控制和广义预测控制具有更好的速度跟踪性能。

图4 速度跟踪仿真曲线
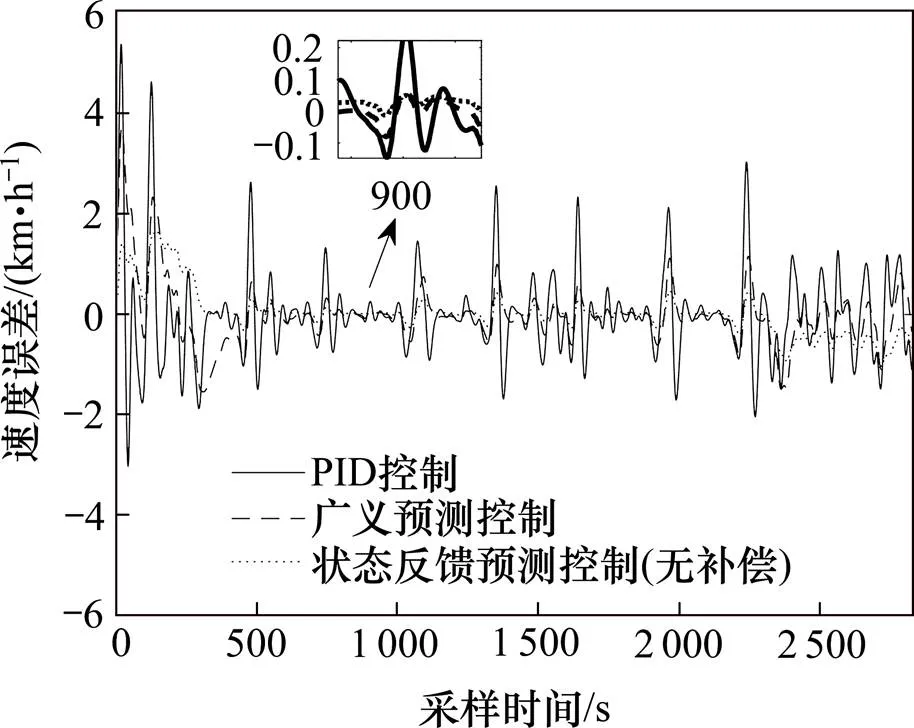
图5 速度误差曲线
为了更加直观地对比图4的仿真效果,将图5的速度误差曲线数值化,制成表格,进行统计分析。如表1所示,PID表示PID控制,GPC表示广义预测控制,无补偿表示状态反馈预测控制(无补偿)。

表1 3种控制方法性能比较
由表1可得,无补偿的正负最大误差范围为[−1.031,1.666]比PID和GPC的[−3.020,5.379]和[−1.541,3.726]2种方法的范围更小。无补偿的平均绝对误差为0.270小于PID和GPC的0.574和0.372,说明整体平均误差较小,并且无补偿的标准差为0.449同样低于PID和GPC的0.907和0.637,说明无补偿在整个控制区间内,控制平稳,误差波动幅度更小。
3.3 高速列车运行过程补偿仿真
在基于子空间辨识法的高速列车状态反馈预测控制的基础上,加入RBF神经网络在线补偿器与BP神经网络在线补偿器进行仿真对比实验,验证其算法有效性。设定BP神经网络隐藏层节点个数=10,权值和阈值初始化取较小的随机值,学习系数=0.1,迭代次数为20次。
如图6所示,为状态反馈预测控制(无补偿)、状态反馈预测控制(RBF补偿)和状态反馈预测控制(BP补偿)的速度跟踪仿真曲线。从图6可以看出,加入RBF和BP神经网络在线补偿器后,2种补偿方法下的状态反馈预测控制(RBF/BP补偿)相比于状态反馈预测控制(无补偿)的速度跟踪曲线更加贴合参考轨迹,跟踪误差更小,说明补偿方法能够使状态反馈预测控制更好的跟踪参考轨迹。其中,状态反馈预测控制(BP补偿)比状态反馈预测控制(RBF补偿)的控制精度高,能够更好的实现高速列车目标速度曲线高精度跟踪控制。
如图7所示,为图6的速度误差曲线。从图7可以看出,加入补偿器后,状态反馈预测控制(RBF/BP补偿)的速度跟踪误差明显减小,整个控制过程中误差波动变得更加平稳,在启动和制动的时候比状态反馈预测控制(无补偿)的跟踪效果更好。其中,状态反馈预测控制(BP补偿)比状态反馈预测控制(RBF补偿)的见效时间更短,能在较短时间内将跟踪误差减小到一个理想的区间内,并且在整个控制过程中,误差波动更加平稳,误差的值更小。

图6 速度跟踪仿真曲线

图7 速度误差曲线
如表2所示,为加入补偿器前后控制性能比较表。其中,无补偿表示状态反馈预测控制(无补偿),RBF补偿表示状态反馈预测控制(RBF补偿),BP补偿表示状态反馈预测控制(BP补偿)。
由表2可得, BP补偿的正负最大误差范围为 [−0.124,0.513]比无补偿和RBF补偿的[−1.031,1.666]与[−1.261,1.203]明显减小。BP补偿的平均绝对误差为0.017小于无补偿和RBF补偿的0.270和0.039,说明整体平均误差较小,并且BP补偿的标准差为0.028同样低于无补偿和RBF补偿的0.449和0.087,说明有补偿在整个控制区间内,控制平稳,误差波动幅度更小。所以可以得出,加入BP神经网络在线补偿器之后,能够更好地减小高速列车状态反馈预测控制系统的速度跟踪误差,更加适合高速列车运行过程的在线补偿,提高控制精度,使控制过程更加稳定,更好的实现高速列车高精度速度跟踪控制。

表2 加入补偿器前后控制性能比较
4 结论
1) 针对高速列车运行过程建模中简化或者忽略的非线性和不确定性以及控制过程中产生跟踪误差的问题,提出一种基于模型补偿的高速列车状态反馈预测控制方法。
2) 在基于子空间辨识法的高速列车状态反馈预测控制方法的基础上,设计BP神经网络在线补偿器,利用BP神经网络的非线性映射能力,输出补偿控制力作用于状态反馈预测控制系统。
3) 仿真结果表明,状态反馈预测控制相较于PID控制和广义预测控制拥有更佳的控制性能,并且加入在线补偿器后,整个控制系统的控制精度明显提升。其中,通过对比RBF神经网络和BP神经网络2种学习网络用于在线补偿时的性能效果,得出BP神经网络更适用于高速列车运行过程的在线补偿。
4) 基于模型补偿的高速列车状态反馈预测控制方法提升了整个控制系统的控制性能,说明该方法能够使高速列车高精度跟踪目标速度曲线。
[1] 訾谦. 3.5万km: 中国高铁的新跨度[J]. 城市轨道交通研究, 2019, 22(12): 6. ZI Qian. 35,000 km: new span of China's high-speed rail[J]. Urban Mass Transit, 2019, 22(12): 6.
[2] Givoni M, Banister D. Speed: the less important element of the high-speed train[J]. Journal of Transport Geography, 2012, 22: 306−307.
[3] 杨辉, 付雅婷. 列车运行建模与速度控制方法综述[J]. 华东交通大学学报, 2018, 35(5): 1−8. YANG Hui, FU Yating. Review of train operation modeling and speed control methods[J]. Journal of East China Jiaotong University, 2018, 35(5): 1−8.
[4] JI X S, LIU D W. Analysis and research of development trend for high-speed railway train control system[C]// Proceedings 7th World Congres on High Speed Rail I, 2010: 195−202.
[5] 何娇, 李盈利, 谭晓明, 等. EMU6动车组气动声学性能分析[J]. 铁道科学与工程学报, 2018, 15(8): 1911−1919. HE Jiao, LI Yingli, TAN Xiaoming, et al. Analysis of aeroacoustic performance of EMU6[J]. Journal of Railway Science and Engineering, 2018, 15(8): 1911− 1919.
[6] 曾永平, 李永乐, 张明金, 等. 高路堤上列车横风荷载的分布研究[J]. 铁道科学与工程学报, 2018, 15(10): 2471−2477. ZEN Yongping, LI Yongle, ZHANG Mingjin, et al. Study on distribution of train cross wind load on high embankment[J]. Journal of Railway Science and Engineering, 2018, 15(10): 2471−2477.
[7] 上官伟, 蔡伯根, 王晶晶, 等. 时速250 km以上高速列车制动模式曲线算法[J]. 交通运输工程学报, 2011, 11(3): 41−46, 54. SHANGGUAN Wei, CAI Bogen, WANG Jingjing, et al. Curve algorithm of braking mode for high-speed trains above 250 km/h[J]. Journal of Traffic and Transportation Engineering, 2011, 11(3): 41−46, 54.
[8] YANG H, ZHANG K P, LIU H E. Online regulation of high-speed train trajectory control based on T-S fuzzy bilinear model[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1496−1508.
[9] 朱爱红, 马晓娜, 段玉琼, 等. 高速列车追踪运行过程的节能优化[J]. 传感器与微系统, 2019, 38(12): 47−49, 53. ZHU Aihong, MA Xiaona, DUAN Yuqiong, et al. Energy-saving optimization during high-speed train tracking operation[J]. Transducer and Microsystem Technologies, 2019, 38(12): 47−49, 53.
[10] 李辉, 肖新标, 金学松. 基于神经网络方法的高速列车车外气动噪声预测[J]. 噪声与振动控制, 2015, 35(3): 56−59, 116. LI Hui, XIAO Xinbiao, JIN Xuesong. Prediction of aerodynamic noise outside high-speed trains based on neural network method[J]. Noise and Vibration Control, 2015, 35(3): 56−59, 116.
[11] HAI R D, SHI G G, BIN N, et al. Extended fuzzy logic controller for high speed train[J]. Neural Computing and Applications, 2013, 22(2): 321−328.
[12] 李中奇, 丁俊英, 杨辉, 等. 基于控制器匹配的高速列车广义预测控制方法[J]. 铁道学报, 2018, 40(9): 82−89. LI Zhongqi, DING Junying, YANG Hui, et al. Generalized predictive control method for high-speed train based on controller matching[J]. Journal of the China Railway Society, 2018, 40(9): 82−89.
[13] 高坚. 高速列车追踪运行节能优化与控制[D]. 北京: 北京交通大学, 2018. GAO Jian. Energy-saving optimization and control of high-speed train tracking operation[D]. Beijing: Beijing Jiaotong University, 2018.
[14] CHEN X, FANG H T. Recursive identification for Hammerstein systems with state-space model[J]. Acta Automatica Sinica, 2010, 36(10): 1460−1467.
[15] 周楚程. 基于子空间辨识的工业过程建模及故障检测[D]. 沈阳: 东北大学, 2017. ZHOU Chucheng. Modeling and fault detection of industrial processes based on subspace identification[D]. Shenyang: Northeastern University, 2017.
[16] WU W, WANG J, CHENG M, et al. Convergence analysis of online gradient method for BP neural networks[J]. Neural Networks, 2011, 24(1): 91−98.
[17] 孙玉杰, 贺思艳, 徐小龙, 等. 神经网络补偿算法在基于MEMS的姿态检测中的应用[J]. 计算机应用研究, 2019, 36(9): 2696−2699. SUN Yujie, HE Siyan, XU Xiaolong, et al. Application of neural network compensation algorithm in attitude detection based on MEMS[J]. Application Research of Computers, 2019, 36(9): 2696−2699.
State feedback predictive control of high-speed train based on model compensation
YANG Hui1, 2, TONG Yinghe1, 2, FU Yating1, 2, LI Zhongqi1, 2
(1. School of Electrical and Electronic Engineering, East China Jiaotong University, Nanchang 330013, China;2. Key Laboratory of Advanced Control and Optimization of Jiangxi Province, Nanchang 330013, China)
The high-speed train operation system is essentially a highly nonlinear and uncertain system. In order to compensate for the non-linearity and uncertainty that are ignored or simplified during the modeling process, and to improve the control accuracy of the high-speed train operation process, method on model compensation of high-speed train state feedback predictive control is proposed. In modeling and control, the subspace identification method and the state feedback predictive control method are used respectively. On this basis, an BP neural network online compensator is established, and the state variables and actual speed of the high-speed train operation process are used as the input of the compensator. The difference between the trajectory and the actual speed constitutes a performance index function for on-line training, and the output compensation control force acts on the control system to complete the on-line compensation to achieve high-precision tracking control of the target speed curve of the high-speed train. Simulation experiment results show that this method can improve the control accuracy of the control system.
high-speed train; subspace identification; predictive control; neural networks; online compensation

TP273;TP183
A
1672 − 7029(2020)10 − 2460 − 09
10.19713/j.cnki.43−1423/u.T20200083
2020−02−10
国家自然科学基金资助项目(61673172,61733005,61803155);江西省青年科学基金重点资助项目(20192ACBL21005)
杨辉(1965−),男,江西高安人,教授,博士,从事轨道交通自动化与运行优化,复杂工业过程建模、控制与运行优化研究;E−mail:yhshuo@263.net
(编辑 阳丽霞)
