无人机测绘技术在人工河道断面测量中的应用
2020-11-19赵雨琪
赵雨琪,王 懿
(黄河水利职业技术学院 测绘工程学院,河南 开封 475004)
0 引言
自“河长制”全面推行以来,河湖监管工作日益深入,河湖生态环境质量得到显著提高。河道测量是为了河流的整治开发而对河床及两岸地形进行测绘并采集标示水位资料的工作,是河道调查的重要手段。河道测量的一个主要内容是河道断面测量,即河槽中垂直于水流方向的横截面测量。长期以来,都是以经纬仪、水准仪和全站仪为主要测量仪器,可以说,传统的河道测量技术已非常成熟,GPS的广泛应用又在很大程度上消除了特殊地形和通视问题带来的测绘困难。然而,传统测量与GPS相结合的方法仍然无法摆脱接触地面测量的局限,此种方法下,需要的控制点较多,导致工作效率低下,而且我国河流数量众多,流域面积巨大,工程量之大可想而知[1]。
近年来,无人机测绘技术的快速发展使空地协同作业成为可能,它改变了传统的测量思路和理念。该技术已在环境监测、土地调查、应急处理、智慧城市建设等领域得到广泛应用。其具有灵巧便捷、成本低、不受地形和通视限制、作业面积大、周期短等优点,可实现对有限测绘资源的优化配置。而且,随着IMU/RTK、多视影像匹配、空三加密等技术和算法的日渐完善,其测量精度也在不断提高。利用无人机测绘技术生成高精度DSM/DEM,利用ArcGIS软件实现断面图的自动绘制,此方法可以满足河道测量的工程要求[2-4]。
1 工作原理
1.1 主要技术路线
本文研究的河道断面测量方法,其技术流程如图1所示。主要分为四个步骤:①外业数据采集;②三维实景重建;③河流测区DEM构建;④断面自动绘制。
1.2 外业数据采集
(1)采集河流测区基础信息,进行河道地形勘验调查,根据工程需求,规划设计无人机飞行路线,并设置航高和重叠度等参数。
(2)根据地形特点及航带规划,在河道两岸,按Z字型布测像控点,用水深探测仪或GPS直接获取采样点的水深数据。
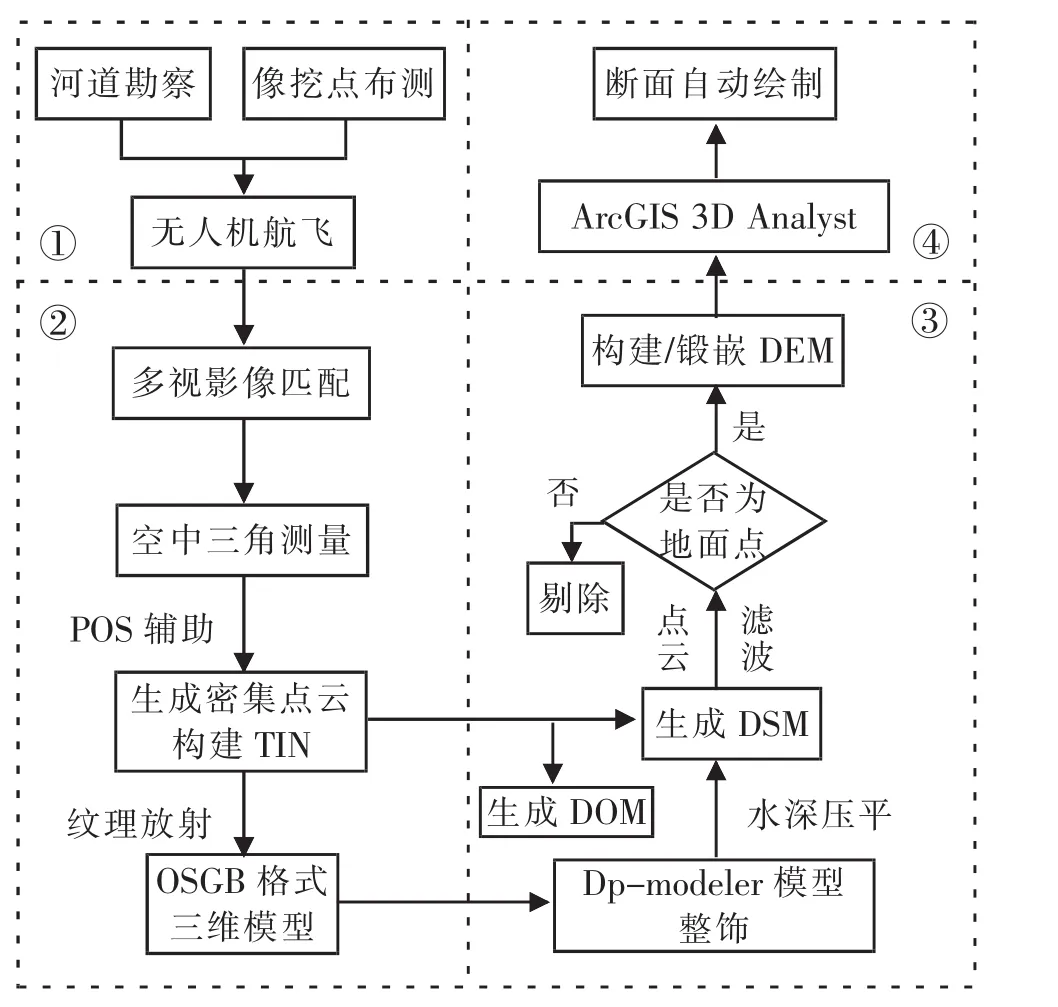
图1 河道断面测量技术流程
(3)利用无人机,按规划参数进行航拍,采集5镜头正射和倾斜影像数据。
1.3 河道三维实景重建
(1)数据预处理。对采集的外业数据进行整体检查和预处理,重点整理影像、POS和像控点数据。
(2)多视影像匹配。为了提高密集匹配质量,可先对下视影像进行一次空三平差,以得到其精确的外方位元素,再根据镜头间的相对方位元素,推算同一摄站各倾斜影像的粗略定向元素,从而实现对5镜头的多视倾斜影像匹配[5]。
(3)POS辅助空中三角测量。选择像控点,并结合POS数据,进行光束法区域网空三平差,算出多视影像精确的外方位元素。
(4)生成TIN。匹配高密度点云,构建空间不规则三角网。
(5)三维实景重建。对TIN表面白模型进行自动纹理映射,生成河流测区三维表面模型。
(6)成果输出。利用ContextCapture软件输出OSGB格式三维模型的同时,还可以分块生成各个瓦片的DSM和DOM数据。
1.4 河流测区DEM构建
现阶段,通过无人机倾斜摄影技术获取的地表模型,虽精度较高,但在工程案例中,其成果包含了地表房屋、树木等地物地貌要素的数字表面模型DSM,它并非纯粹的DEM数据[6]。DEM是DSM的子集,由DSM构建DEM,需要将密集点云中的非地面点剔除。
由于人工河道的河槽与河床通常是规则的坡面,因此在实际工程测量中,可灵活使用水深探测仪(深水)或GPS(浅水),沿河道对水深进行采样测量,求出区间的平均水深[7]。将OSGB格式的模型导入Dp-modeler软件,对水深进行压平处理后,可输出不带水深信息的表面模型DSM。如图2所示。

图2 水深压平处理
本研究利用AgisoftPhotoScan软件,对经上述方法处理后的密集点云进行滤波分类编辑处理。基于TIN渐进内插的滤波方法,区分地面点和非地面点。针对地面点密集点云,最终生成将水深压平的河流测区DEM成果。
1.5 河道断面自动绘制
利用ArcGIS软件提供的栅格数据集镶嵌功能,对整理好的tif格式分块河流测区DEM和DOM栅格数据,按照各自相同的波段数进行镶嵌和拼接,生成完整的河流测区DEM和DOM成果,并在ArcMap中进行二维可视化显示。其中,DEM成果还可在ArcScene中实现三维浏览,这样就使成果展示更加直观。
由于DEM是一类展示高程信息的3D功能性表面,在由ArcMap建立的DEM图层中,用户可使用3DAnalyst工具,任意交互,创建3D剖面切割线,该切割线应尽可能与水流方向垂直[8]。利用上述方法,便可生成线性的河道断面图。
2 实验成果
该实验使用JOUAVCW-10垂直起降固定翼无人机,搭载JR503五镜头云台相机,沿实验河道拍摄单镜头2400万像素的数字影像。相对航高150m,航向、旁向重叠度均为80%,巡航速度20m/s。沿河道,按Z字型布测像控点,每隔50m采样河道断面点,测量其水深数据。测区和像控点如图3所示。

图3 测区范围及控制点布测
此次实验主要采用ContextCapture软件,对无人机采集的外业数据进行倾斜摄影内业数据处理,经过多视影像匹配、空中三角测量等步骤,生成三维密集点云,在此基础上,构建TIN和表面白模型,通过自动纹理映射,重建三维实景模型。如图4所示。
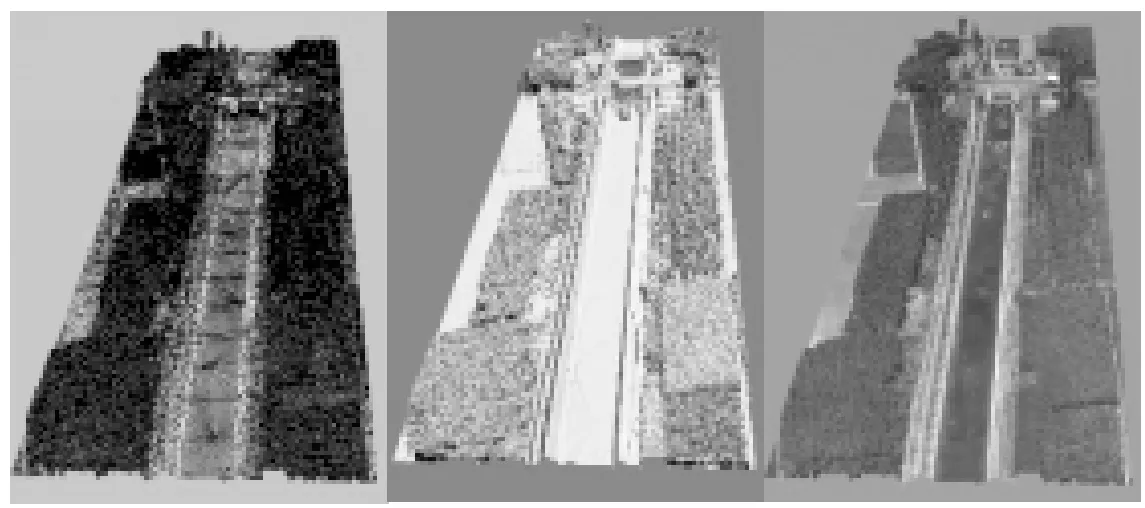
图4 TIN-白模-实景模型
运用PhotoScan软件,对由倾斜摄影内业处理创建的密集点云进行滤波分类编辑处理,将其分为地面点和非地面点。基于地面点密集点云进行计算,生成独立瓦片的DEM和DOM数据。利用ArcGIS中的“数据管理工具—栅格数据集—镶嵌至新栅格”功能,对分块的DEM和DOM数据进行镶嵌和拼接,生成最终的河道测区DEM和DOM数据。如图5所示。
在ArcScene中,打开镶嵌完整的DEM,可以进行三维可视化浏览。这样,对河道表面高程信息,可以更加直观地展示。如图6所示。
生成河道测区的DEM数据后,用户可以在ArcMap中使用3DAnalyst工具的创建3D线功能,交互选择任意剖面进行切割,根据选择的剖面切割线,即可自动绘制出相应的河道横断面图,从而直观展现河道地形。如图7所示。
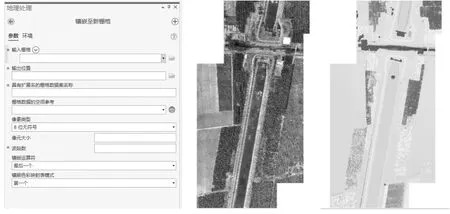
图5 DOM/DEM栅格数据镶嵌

图6 ArcScene三维浏览DEM
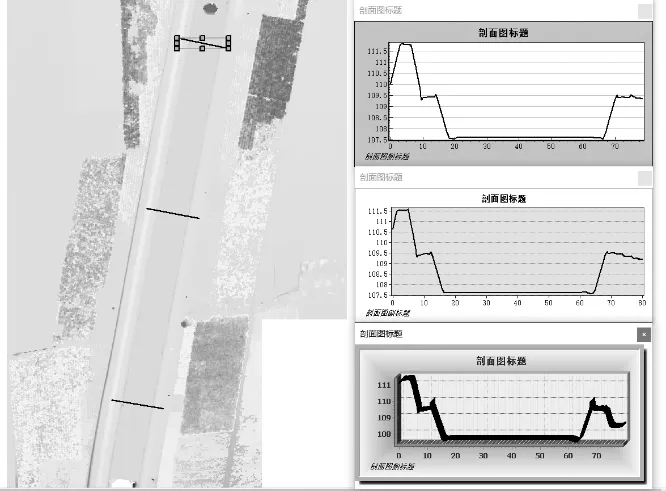
图7 断面自动绘制
为了核检实验河道测区DSM/DEM和三维实景模型的精度是否满足工程要求,从10个已布测的像控点中任意选择6个作为平差条件,进行空中三角测量,构建TIN,生成DSM,其余4个点作为待验证的检查点。在三维模型中,标定4个检查点的位置并获取其X,Y,Z坐标,将该坐标与已知坐标放在一起进行比对,得到三个方向的中误差,它们分别为0.024m、0.030m和0.074m,见表1。由此得出结论,该精度可基本满足河道断面测量的工程要求。在后续的工作中,为了进一步提高河道DEM精度,提高工作效率,减少外业工作量,可对机载Lidar激光扫描及无人船水下地形测量等先进测绘技术进行尝试和研究。

表1 检查点精度表
3 结语
本研究利用无人机测绘技术,对人工河道进行断面测量。通过倾斜摄影,测量内业、外业工作,生成高密度点云、TIN、实景三维模型和DSM。经模型修饰和滤波处理,生成具有较高精度的河道DEM数据,再借助ArcGIS的3D Analyst功能,实现河道断面图的自动绘制。与传统河道测量技术相比,该方法易掌握,测量精度高,尤其是在大范围河道断面测量中运用,可使工作效率显著提升。该技术可为河道调查、河道治理维护提供测绘数据保障。
