修井机司钻作业舒适度的多变量综合评价研究*
2020-11-18屈文涛任姣姣徐剑波史婵媛杨斌
屈文涛,任姣姣,徐剑波,史婵媛,程 寓,杨斌
(1.西安石油大学 机械工程学院, 陕西 西安 710065; 2.长庆油田分公司勘探开发研究院, 陕西 西安 710018;3.长庆油田分公司第三采气厂, 内蒙古 鄂尔多斯 017300)
0 引 言
近几年,随着HSE MS在国内外各油田的大力实施,提高工程机械驾驶室的舒适度已进入公众视野[1]。修井机是石油机械的重要设备,但修井作业工作环境恶劣,司钻工长时间承受着大负荷、高频率的工作[2]。作业空间的安全性、舒适性直接影响着作业人员的误操作率和工作效率[3],而在修井作业中,刹把是司钻工高频率使用的操作部件[4]。因此,刹把的布局问题成为影响司钻工作业舒适度的重要因素。
布局问题是人机布局问题。因此笔者选取“人的因素”(身高、体重、臂长)与“机的因素”(刹把铰接位置距离人体坐标的横向距离M、纵向距离N、高度H)展开对作业舒适度影响的研究。由于BP神经网络(Back Propagation Neural Network,以下简称BPNN)具有优越的分类能力和多维的函数映射能力[5],是一种基于误差逆向修正多次反馈的网络,常被用于各类多输入类模型[6-8]的建立。本文亦将基于BPNN建立修井机司钻工作业舒适度的评价模型。
司钻工对操作舱布局设计的感受具有多维性,除生理感受之外,心理感受也是一个重要的维度。为真实直观记录司钻工作业舒适度评价,笔者通过主观评价法,记录受试者的主观感受与体验[9],从多维度[10]综合评价操作舱刹把布局的设计质量,为建立司钻作业舒适度评价模型提供依据。
1 试验与数据
1.1 试验方案
为记录受试者在不同位置参数下作业的舒适度感受,规定8个测试点位置,要求受试者在这8个测试点进行操作试验,最终受试者可自主调节位置至最佳作业姿态1次,即每位受试者应完成共9个测试点的操作试验。
(1) 试验动作
对现场作业情况调研分析及动作提取,如图1中,司钻工在操作过程中,将刹把从零位(α角)向后拉至极限位置(β角),观察窗外工况后,由β角复位至α角,如此往复,完成作业任务。
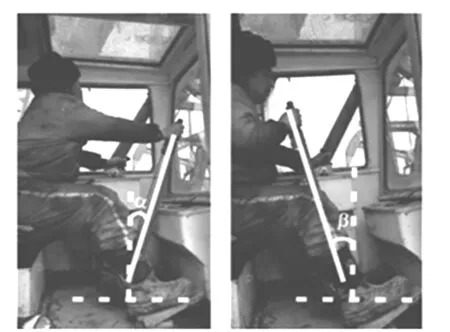
图1 修井作业关键动作提取
由此,规定试验动作如图2,受试者听到开始口令后,将刹把从零位(α角)匀速向后拉至极限位置(β角),停留5 s后再匀速推至原位并停留5 s。为使受试者熟悉作业动作,首先要求受试者操作5 min,而后每个测试点进行10 min操作后记录其感受。为避免受试者连续操作导致疲劳累积,影响后续试验评分的准确性,要求受试者每完成一个测试点的试验后休息20 min,再进行下一个测试点的试验。
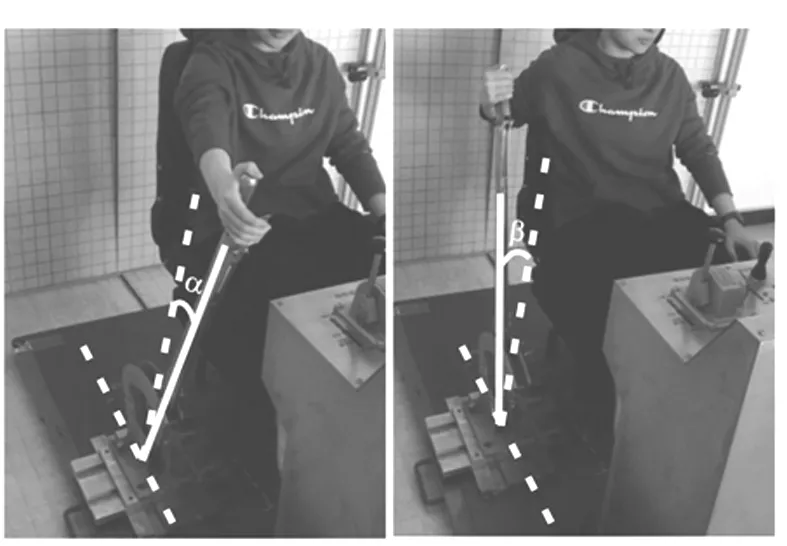
图2 XJ70型修井机司钻作业实验台
(2)试验人员与平台
邀请13名男性大学生作为志愿者,身体健康,近期未进行剧烈运动。试验平台为XJ70型修井机司钻作业实验台,实验台主要包含控制台、座椅、刹把、踏板以及底板等。其中,座椅可升降;刹把可实现推拉并可调节前后、左右位置等。
1.2 试验数据
根据Likert量表建立五点量表,且为引导受试者准确表达操作感受,对评语集分制规定为“舒适8~10分;较舒适6~8分;一般4~6分;不舒适2~4分;很不舒适0~2分”。
以1号受试者操作试验为例,首先对其进行身高、体重、臂长等基本参数测量(见图3)。而后分别记录其在8个规定测试点以及1个自主调节测试点的操作感受。如表1中,第一组数据表示在第一个测试点,即刹把铰接位置距离人体坐标的横向距离M为240 mm、纵向距离N为353 mm、高度H为443 mm时,受试者的操作舒适度打分为5分,语义为“一般”。表1中:人员为1#;身高为1 835 mm;体重为59.5 kg;臂长为590 mm。

图3 1#受试者进行试验
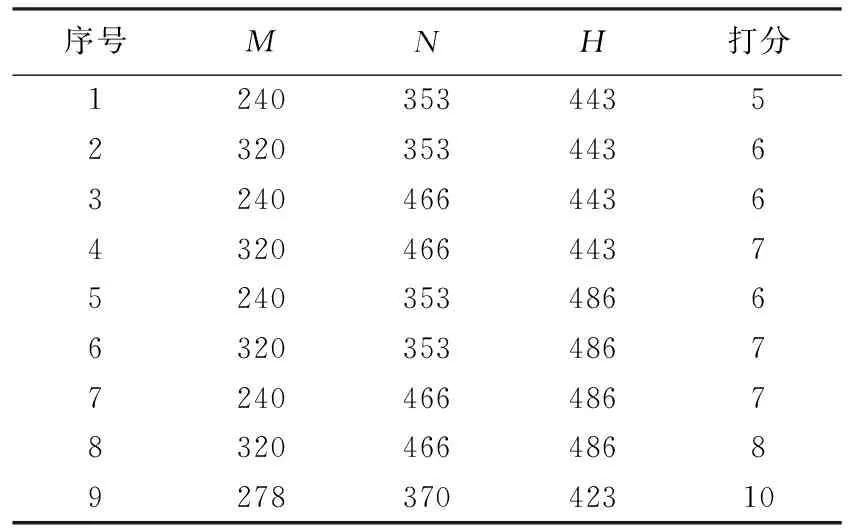
表1 1#受试者试验记录表
2 BPNN建模
2.1 应用BPNN的合理性
BPNN采用误差逆传播学习算法,由输入层、隐层和输出层组成,不断调整层间权重,从而使网络的实际输出更接近理想输出,具有简单、易行、计算量小、并行性强等优点[11]。图4即为一个拥有d个输入神经元、l个输出神经元、q个隐层神经元的BP网络结构,其中bh为隐层第h个神经元的输出。
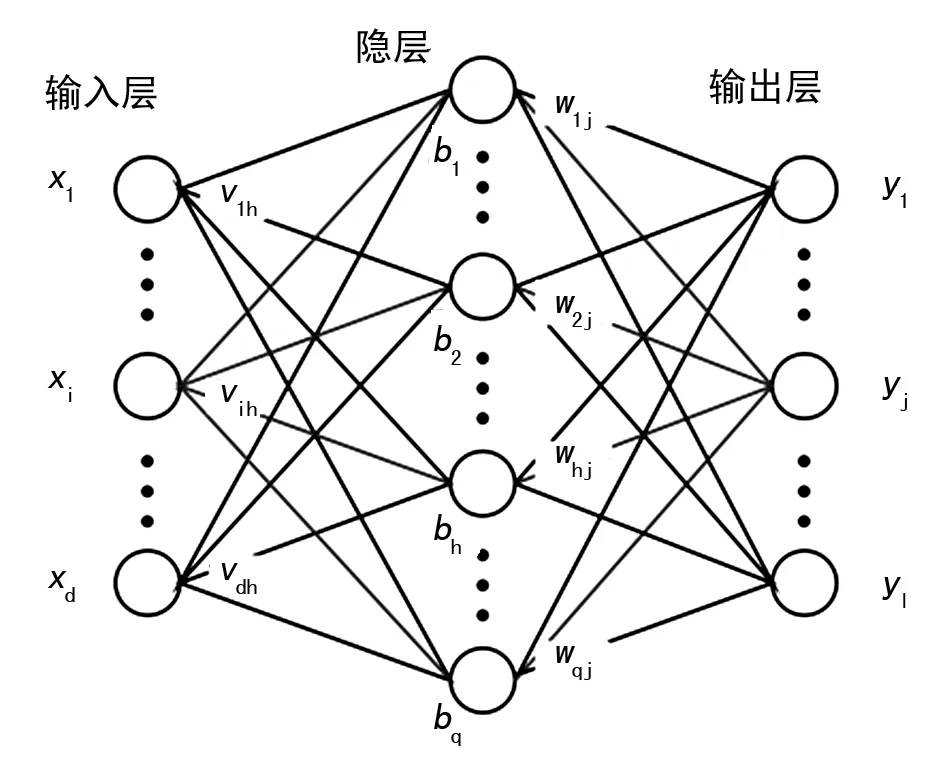
图4 BPNN的变量符号
BPNN能模拟人脑机能,可以较好地模拟司钻工作业时的判断过程,且具有优良的非线性逼近能力,因而能够准确描述相关因素与舒适度评分之间的非线性关系。
2.2 结构及参数的选择
应用BPNN建立司钻工舒适度评价模型,对司钻工作业舒适度进行预测。在MATLAB中编辑神经网络程序,其中,误差传递函数采用Sigmoid函数,控制误差为10~12;为避免陷入死循环,设定最大循环次数为10 000次。
(1) 输入数据
利用试验得到的数据集(S+T),随机选择S组数据作为训练数据训练网络,另外T组数据对数据测试网络的分类能力进行测试。
(2) 确定BPNN结构
由于输入层有6项指标(身高、体重、臂长、M、N、H),输出层为1项(舒适度),隐层神经元由经验公式得出估计值[12],再经试验与比较得到。公式如下:
(1)
式中:q为隐层神经元个数;m为输入层神经元个数;n为输出层神经元个数;a为1~10的常数。
结合试凑法确定隐层节点个数,并采用确定性系数R2来表征预测值的逼近程度,定义为:
(2)

由表2可以看出,隐层节点个数对网络预测模型的准确性有较大影响,其中,当隐层节点为9个时,网络准确性较高。因此设定BPNN结构为6-9-1,即输入层有6个节点,隐层有9个节点,输出层有1个节点。
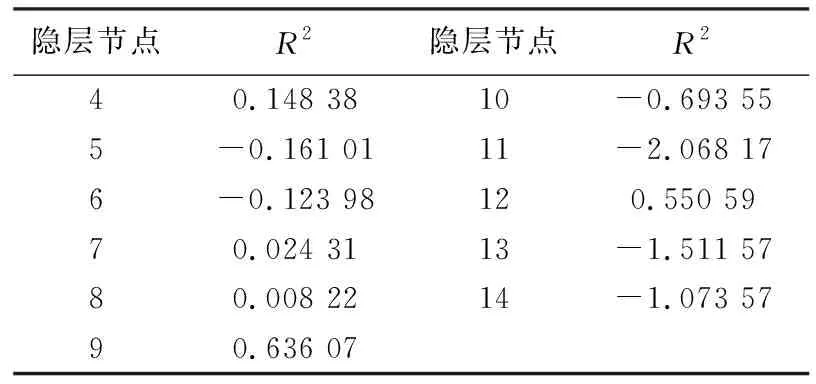
表2 不同隐层节点个数时的确定性系数
(3) 确定训练次数
为在仅有有限的数据样本的情况下,探寻网络准确率较高的预测模型。进一步展开了训练次数对网络精度影响的研究。随机选取90组数据为训练样本,其余27组数据为验证样本,绘制训练次数对舒适度预测模型准确性对比如图5。
从图5中可以看出,当训练次数为15 000次、20 000次时,舒适度预测值更接近验证样本的原始数据;而当训练次数为20 000次时,虽有较好的拟合效果,但其预测能力不稳定。因此,为使网络具有良好的预测能力与稳定性,选定训练次数为15 000次。
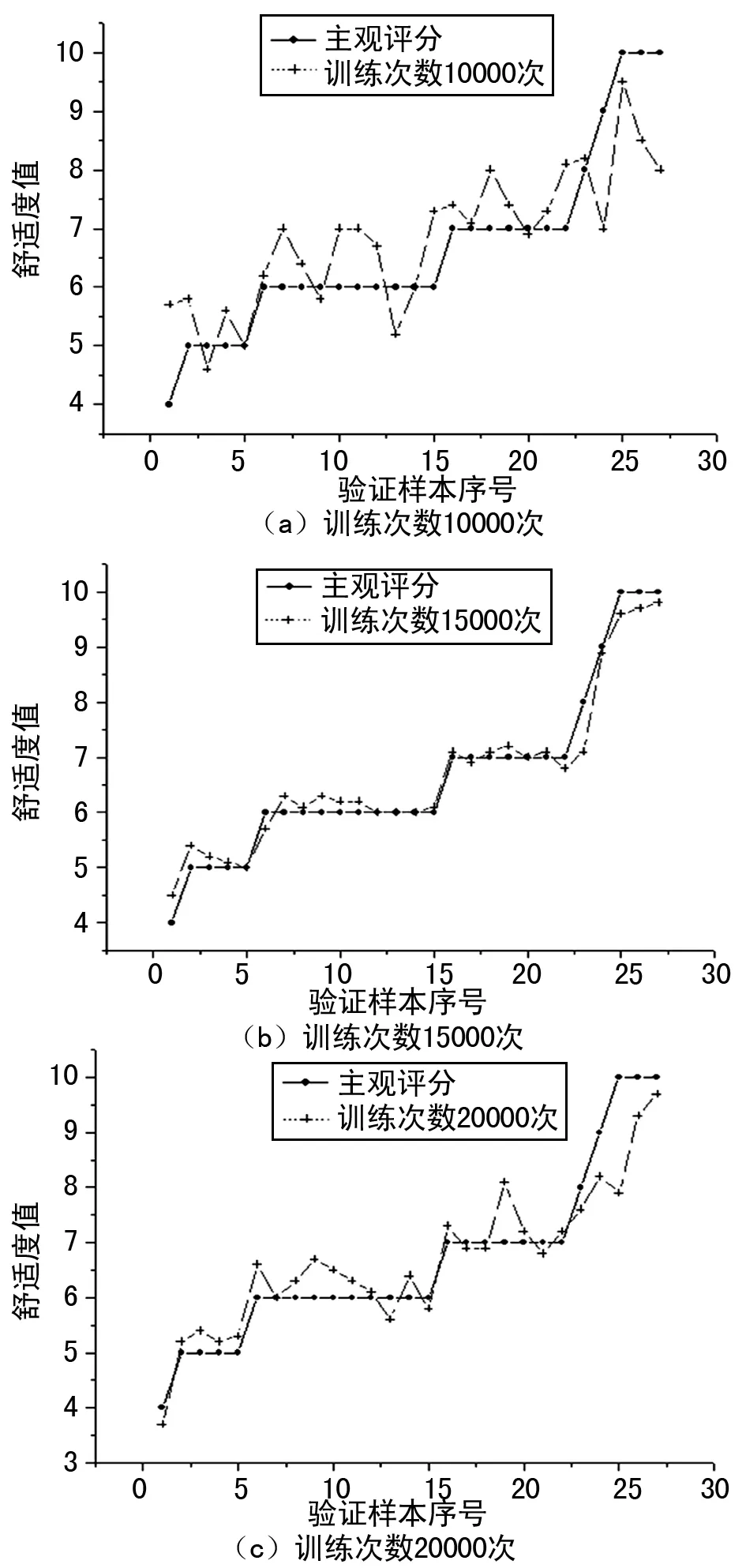
图5 训练次数对网络预测能力的影响
3 模型准确性验证
(1) 网络模型预测
为验证建立网络模型的准确性,依照GB1988-10000中成年男性人体尺寸,选取5th、50th、95th百分位三组人体尺寸,并任意选取三组M、N、H数据,应用网络模型进行预测,预测结果如表3所列。
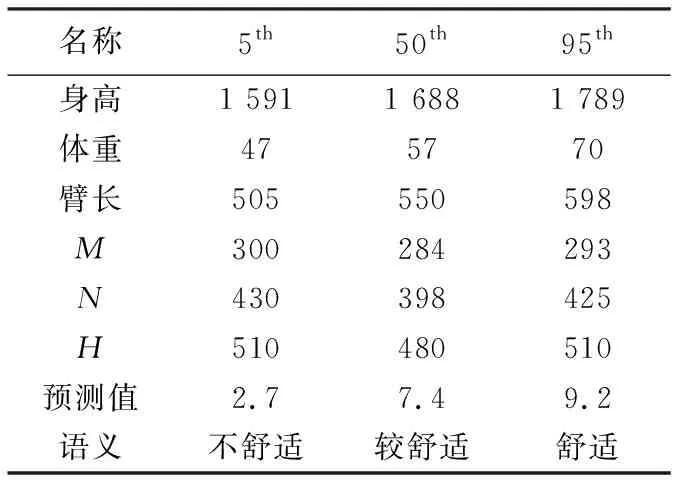
表3 BPNN预测结果
(2) AMS逆向动力学仿真
基于生物力学仿真软件AMS对人体模型进行逆向动力学仿真,得到不同位置参数下作业人员的最大肌肉激活度。由于肌肉激活度是指在完成某动作时,肌肉实际发力与其最大力的比值,即肌肉激活度数值越小,则表明完成某动作用力小,舒适度高。因此,定义由AMS仿真得到的舒适度为:
(3)
式中:Amax为最大肌肉激活度。
依照表2中人体数据及环境设定建立人体模型(见图6)与“人-机”交互仿真模型(见图7)。
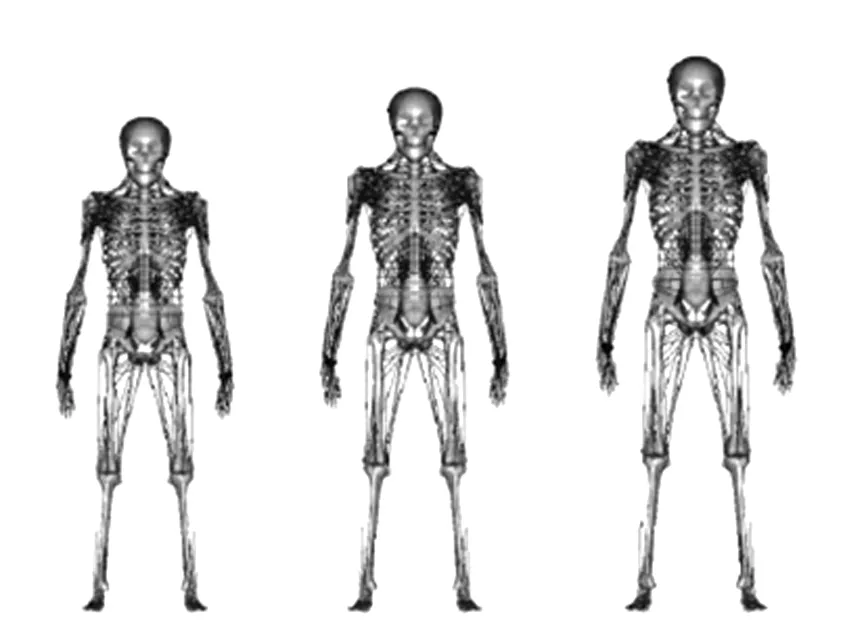
图6 5th、50th、95th百分位人体模型
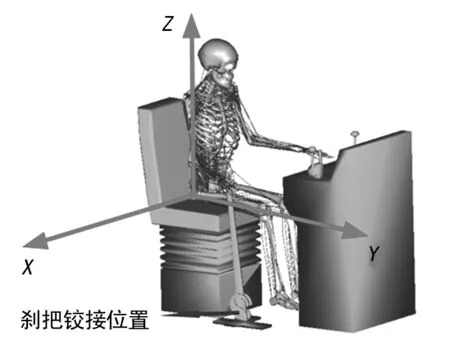
图7 5th百分位逆向动力学仿真模型
设定边界条件与约束方式[2]后,对人体模型进行逆向动力学仿真,输出最大肌肉激活度Amax,并计算得舒适度DAMS整理如表4所列。
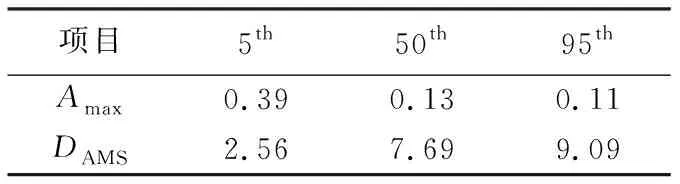
表4 AMS仿真结果
(3) 预测结果对比
应用AMS仿真结果对所建立模型的准确性进行验证,对两者分析结果统计如图8。由图8可以看出,AMS的仿真分析结果在BPNN模型预测结果±0.3内。即两者评价结果的一致性较强,BPNN评价模型的预测准确性较高,且稳定性良好。
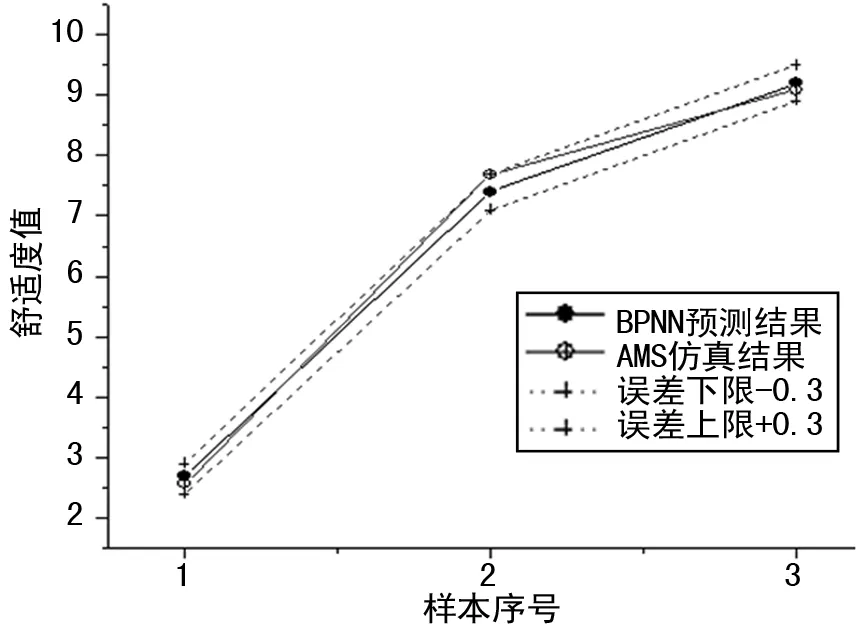
图8 BPNN模型预测准确性验证
4 结 论
文中从“人”、“机”角度制定了修井机司钻作业舒适度评价的主观试验。结合舒适度评价的“多输入单输出”特点,选择基于BP神经网络建立修井机司钻作业舒适度的多变量综合评价模型,并对网络中重要参数进行选择与优化。结果表明,当BPNN结构为6-9-1,训练次数为15 000次时,评价模型的预测结果理想。
应用生物力学仿真软件AMS对评价模型的准确性进行了校验,发现两者的评价结果趋于一致。表明本文基于BP神经网络建立的多变量舒适度评价模型的预测准确性较高,稳定性较好,可以用于修井机司钻作业舒适度的评价工作,提升司钻工的作业环境与质量,减缓作业中疲劳产生。