卡尔曼滤波结合数字锁相放大器的弱光声信号降噪方法研究
2020-11-18吴铁洲焦磊明宋鹏才
吴铁洲,李 炎,祁 军,焦磊明,宋鹏才
(1.湖北工业大学太阳能高效利用及储能运行控制湖北省重点实验室,湖北武汉 430068;2.深圳市林科电气发展有限公司,广东深圳 518126)
0 引言
变压器是电力系统中最重要的设备之一,其安全运行能力直接影响电网运行的可靠性,因此对变压器的运行状态进行在线监测十分重要[1]。用光声光谱传感器对变压器油中溶解气体进行检测,通过分析不同气体浓度比值是目前判断变压器潜在运行故障的主要方法,其具有灵敏度高、稳定性好以及不需要载气等优点[2]。
光声光谱技术是一种基于光声效应的量热光谱技术,它用一束频率可调制的单色光照射光声池内气体,气体吸收光能由基态到激发态,并立即以释放热能的方式退激,释放的热能向周围介质按光的调制频率产生周期性加热,从而导致介质产生周期性压力波动[3-4]。这种声压被麦克风检测并转化成光声信号,当气体分子数越多产生的光声压力波越强,光声信号也会越强,因此便可以对气体浓度进行定量分析[5]。但是这种信号不可避免的夹杂着环境噪声和电路噪声,严重降低了对低浓度气体的检测精度,影响了对变压器运行状态的判断[6-7]。
文献[8]对光声信号的产生机理进行理论研究,分析了油中溶解气体的红外光谱特性,并构建了气体在线监测平台,验证了该方法能有效检测油中溶解气体含量。文献[9]针对气体压强对光声光谱检测具有重要影响进行分析,从理论上推导出气体压强与气体吸收系数、谐振频率、光声池品质因数、池常数及与气体光声电信号的函数关系,并通过实验验证了该函数关系的正确性,为进一步完善光声光谱传感器在线监测系统提供了技术支撑。文献[10]设计了一套光声光谱法的气体检测平台,在该平台上研究温度和压力对检测系统输出结果的影响,并用直线拟合的方法标定了浓度与系统输出的关系。文献[11]针对光声池体积庞大、光源校准工艺复杂及斩波器调制技术影响稳定性等问题分析,对有源气室光声池、共振管、麦克风和光电探测器进行一体化设计,实现了光声检测系统的小型化。文献[12]针对基于DFB激光器的共振型光声光谱技术痕量乙炔气体展开研究,在传统光声池的出射窗口采用一个平面反射镜增加入射光功率来增强光声信号强度,从而提高光声系统探测灵敏度。以上文献是针对光声光谱法的物理特性进行研究分析并提出相应的优化方案,但对低浓度气体激发的弱光声信号进一步降噪、提高测量精度和稳定性的研究较少。文献[13]为了优化对微弱光声信号的提取,通过修正电机转速的偏差来减小提取信号频率的误差,但是并没有进一步滤除信号中的噪声。文献[14]将小波分解引入到光声光谱信号降噪过程中,其利用门限阈值对小波系数进行处理,再进行重构,这种信号处理方法可以降低光声信号中的噪声,但是在工程应用中较为繁琐。
文中对光声信号提取原理进行分析,提出卡尔曼滤波结合数字锁相放大器的光声信号降噪方法,在锁相放大环节的低通滤波器后加入卡尔曼滤波器进行二级滤波,充分利用卡尔曼滤波器不断预测和修正输出值的优势,进一步降低锁定频率光声信号中的噪声。并根据实际应用情况进行仿真和实验,结果表明所提方法增大了可检测的信噪比范围,在检测精度和稳定性与传统方法相比有一定提高。
1 锁相放大器与卡尔曼滤波构成二级滤波
1.1 锁相放大器原理
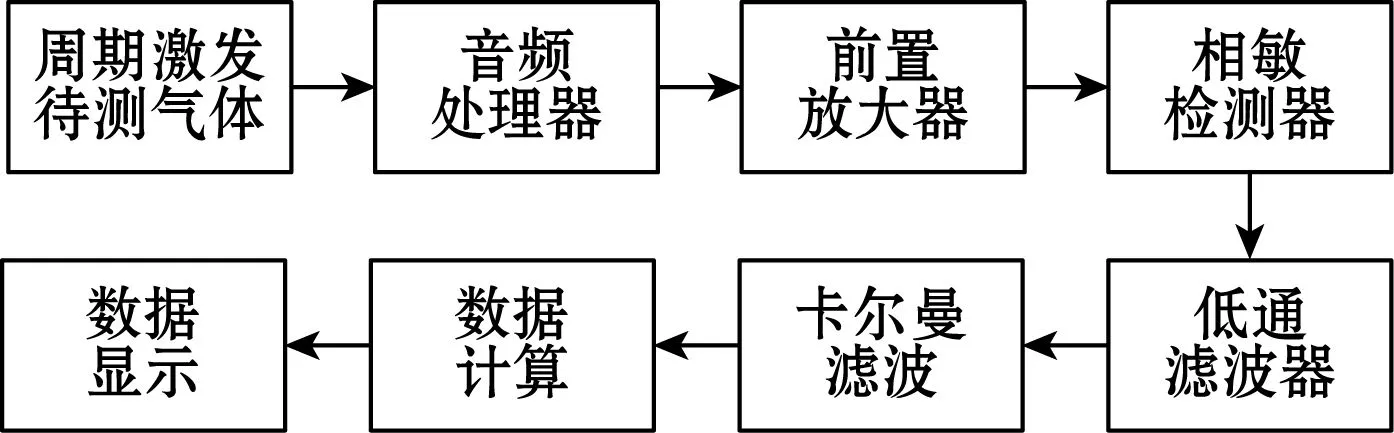
锁相放大器能够从较大噪声中分离出频率已知的信号,主要由前置放大器、相敏检测器和低通滤波器组成的一种信号提取电路,其结构如图1所示。

图1 锁相放大器结构图
前置放大器将微弱的输入信号放大,相敏检测器利用相关性将频率已知的信号从噪声中提取出来,低通滤波器滤除高频分量并将其转化成电压有效值输出。设含有噪声的输入信号为式(1)
Si(t)=Xsin(ωt+φ)+ni(t)
(1)
式中:ω为的频率;φ为初相;ni(t)为噪声信号。
根据相关性,在参考输入通道输入一个无噪声的参考信号,如式(2)
Sr(t)=sin(ωt)
(2)
参考信号与输入信号相乘、积分,相敏检测器的输出为式(3)

(3)
由于ni(t)与sin(ωt)是不相关的,多次相乘后平均值为0。虽然锁相放大器检测的信噪比下限可达-60 dB,但是低浓度气体在光声腔内激发的光声信号十分微弱,且在线监测系统在实际应用中是处于较为恶劣的环境中,极大的环境噪声和电路噪声使低浓度气体激发的光声信号的信噪比远低于-60 dB,这使得锁相放大器提取出的信号中不可避免的含有较强噪声,从而导致低浓度气体的测量结果波动较大。
1.2 卡尔曼滤波原理
卡尔曼滤波通过对前一时刻态预测值和当前时刻观测值以及预测误差的计算得到当前时刻的最优估计值,进而对下一状态进行预测。其滤波的状态预测方程如式(4)、观测方程如式(5)所示:
Xk=AXk-1+BkUk+Wk
(4)
Zk=HkXk+Vk
(5)
式中:Xk是状态量;Zk是观测量;A是状态转移矩阵;Hk是测量矩阵;Wk~(0,Qk)和Vk~(0,Rk)是均值为0、互不相关的白噪声,其方差分别是Qk和Rk。
当状态量Xk和观测量Zk满足式(4)、式(5)条件时,系统过程噪声Qk、Rk为高斯噪声,k-1时刻的最优估计值Xk-1已知,则k时刻的估计值Xk可以按照如下步骤进行求解。
(1)下一时刻状态预测
Xk|k-1=AXk-1
(6)
(2)协方差矩阵预测
Pk|k-1=APk-1AT+Qk-1
(7)
(3)状态更新
(8)
(4)协方差更新
Pk=(I-KkHk)Pk|k-1
(9)
(5)卡尔曼增益
(10)
式中:Pk是迭代协方差矩阵;Kk是卡尔曼增益;I为单位矩阵。
卡尔曼滤波具有的优势是:获得未知分布的均值和协方差只需要保存较少的信息;均值和协方差具有线性传递性。
1.3 两级滤波降噪原理
锁相放大器利用相关性可在较大噪声中分离出特定频率的信号,但是当原始信号信噪比低于-60 dB时,提取的信号因叠加噪声而失真。较低的截止频率可以增强锁相放大器的降噪能力、提高信号可识别信噪比的范围,但是截止频率越低实时性越差、信号强度也会随之衰减,这对变压器的实时在线监测十分不利[15]。
卡尔曼滤波是一种时间域滤波算法,其输入与输出关系是由状态方程和输出方程在时间域内给出,计算是一个不断“预测-修正”的过程,将被估计的信号看作是在噪声作用下一个线性系统的输出,具有保留较少的信息和线性传递的优势,因此这种滤波方法非常适合平稳随机过程的降噪。
为了减小所采集电压有效值的波动,在低通滤波器后加入卡尔曼滤波器进行二级降噪,卡尔曼滤波与锁相放大器结合降噪结构图如图2所示。

图2 卡尔曼滤波与锁相放大器结合降噪结构图
X(t)=X(t-1)+W′(t)
(11)
Z(t)=X(t)+V(t)
(12)
式中:X(t-1),t=2,3,…,L,为根据环路滤波器前一时刻输出值对现在时刻的最优预测值,第一个最优预测值为第一时刻环路滤波器输出值;V(t)为卡尔曼滤波器测量噪声;Z(t),为本次环路滤波器输出值,t=1,2,3,…,L。
系统状态预测后,协方差预测为
(1)大学生对网络借贷平台的认知。在被调查对象中,有64.58%的大学生使用过网络借贷平台。在对网络借贷平台的态度方面,18.75%的大学生认为从网贷平台借贷是一种值得提倡的消费方式,27.08%的大学生则表示反对,54.17%的大学生持中立态度。这表明,大学生对网络借贷平台的认可度适中。在没有使用过网络借贷平台的大学生中,不使用网络借贷平台的主要原因是能够保持收支平衡。这说明,大学生对网络借贷平台的使用与日常收支情况联系紧密。
P(t|t-1)=P(t-1)+W′(t)
(13)
卡尔曼增益为式
Kg(t)=P(t|t-1)/[P(t|t-1)+V(t)]
(14)
则下一时刻状态最优估计为式(15)所示
X(t|t)=X(t|t-1)+Kg(t)[z(t)-X(t|t-1)]
(15)
协方差更新为式(16)
P(t|t)=(1-Kg(t))P(t|t-1)
(16)
2 卡尔曼滤波结合锁相放大技术的设计
根据光声光谱传感器检测原理,当光声池内气体浓度一定时,调制产生的声压强度恒定,声压信号经麦克风转化为光声信号,经相敏检测器提取频率已知的信号,通过低通滤波器滤出高频并将其转化为有效值,将该值送入卡尔曼滤波器。在卡尔曼滤波器中,每一时刻的有效值都通过乘积被记录到下一时刻的后验估计值中,即某一时刻的最优估计看起来是由前一时刻的最优估计和当前观测值相乘得到的概率最大值,但实际它通过不停的乘积和迭代,这一时刻的后验估计值中包含了之前所有测量值的信息。
2.1 噪声统计
在卡尔曼滤波实现的过程中,噪声的观察和预测决定了卡尔曼滤波的性能,文中设计系统取前10个当前观察量作为参考点来得到其噪声统计量即观测噪声方差。统计方法为先对10个时刻低通滤波器输出求平均值,再对10个参考点求平均值做差,得到一组由10个差值组成的噪声序列,将这组噪声序列的方差作为该观测量的观测噪声方差,本设计系统中测量噪声方差取观测噪声方差的一半。
2.2 野值修正
在测量过程中气体的浓度值不会发生突变,如果某个时刻电压有效值与前一时刻有效值相差超过一定限制N则称此测量值为野值。
本文采用野值判定条件与修正方法为Y0∶Z(k)满足
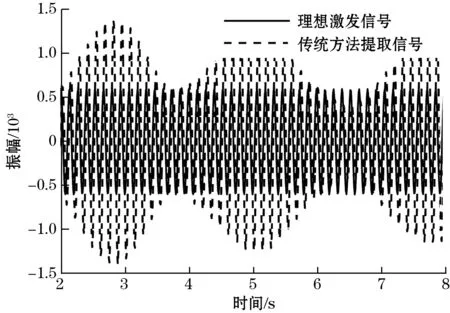
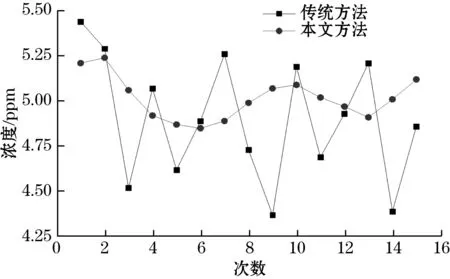
|Z(k)-Z(k-1)| (17) Y1∶Z(k)不满足上述条件 如果Y0成立,则将Z(k)作为正常值;Y1成立,则Z(k)为野值。若测量结果出现野值时,则用Z′(t)代替Z(k),Z′(k)表达式为式(18) Z′(k)=Z(k-1)+X(k/k-1)·T (18) 将本次滤波的观测值与上一次滤波的观测值做差后取绝对值,如果此绝对值小于限定值,则本次滤波的观测值不是野值,否则认为本次滤波的观测值是野值,并用上一时刻滤波的观测值加上状态预测值X(k/k-1)与滤波时间乘积来代替本次滤波后的观测值。 根据光声光谱变压器油中气体在线监测系统实际应用情况在Matlab/simulink中进行仿真,设置光声信号频率为15 Hz、幅值为600的正弦信号,高斯噪声信号的幅值为4 000,同时为了模拟复杂工况,叠加幅值为光声信号的4倍的工频干扰信号和幅值为1 000、频率变化率为2 Hz/s的扫频信号。 仿真后的实际输出信号与原始光声信号对比如图3所示,可以看出在该条件下,光声信号完全湮没在噪声中,其噪声强度达到光声信号强度的10倍,若不能高效提取真实信号将导致测量结果严重失真。 图3 实际信号与理想光声信号 传统锁相放大器进行信号提取时其仿真结果如图4所示,经过2 s后其频率与相位锁定,且与实际信号频率一致,但是其信号幅值的波动很大,其峰值为真实信号峰值的2.41倍,谷值信号仅为真实信号的0.56倍,这是由于该信号的信噪比已经低于锁相放大器可以识别的下限,单一锁相放大器提取的信号中仍叠加有较强的噪声而导致波形失真,若用该输出信号计算气体浓度会产生严重误差。 图4 传统锁相放大器输出与理想光声信 经过所提方法处理后的光声信号与原始光声信号对比如图5所示.,可以看出约2.4 s后信号被提取,且提取的信号幅值波动范围明显减小,其峰值为真实信号峰值的1.75倍,谷值信号为真实信号0.89倍,改进方法输出信号的波动率比传统锁相放大器输出信号的波动率减小了53.51%,即改进后的方法降噪性能增强,增大了可跟踪的信噪比范围,可以更好的提取弱光声信号。 在仿真验证的基础上,将文中提出的方法应用于光声光谱变压器油在线监测系统中,搭建的实验平台如图6所示,传感器中模数转换处理芯片为PCM1804,光声信号锁相放大处理芯片为ADSP21262,数据处理计算芯片为LPC2148,其中调制光声信号的频率与仿真中一致,为15 Hz。 图6 实验平台 具体流程如图7所示,本实验中标准浓度气由高精度配气仪配制(误差为2%),将配制标准浓度为5 ppm(1 ppm=10-6)的C2H2气体通入到光声池中,分别用传统方法和本文方法连续测量15次。 图7 实验数据生成过程 图8为两种方法测量结果的折线图,由图可以看出本文方法测量浓度值的波动明显比传统方法小。传统方法测量最大误差为1.07 ppm,其最大波动率达21.4%,本文方法测量最大误差为0.49 ppm,其最大波动率为9.8%。由实验数据显示,本文方法无论在波动率和精确度上均优于传统方法,即本文方法可以有效提高光声光谱传感器对低浓度气体在线监测的测量精度。 图8 本文方法和传统方法测量结果对比 为进一步提高对变压器油中溶解气体在线监测精度,文中针对低浓度气体激发的弱信号中含有强噪声这一问题进行分析,提出卡尔曼滤波结合锁相放大技术对弱光声信号进行降噪处理。 (1)综合分析光声光谱技术、锁相放大技术以及卡尔曼滤波降噪原理,通过不断预测和修正低通滤波器输出值,使叠加在锁定光声信号中的噪声进一步减小; (2)通过Simulink仿真表明,在信噪比相同条件下卡尔曼滤波与锁相放大器相结合的方法较传统方法输出信号波动率减小了53.51%; (3)实验数据显示,在测量标准浓度为5 ppm的C2H2气体时所提方法测量精度较传统方法提高11.6%; (4)仿真分析和实验结果表明,文中提出的方法可进一步降低光声信号中的噪声,且在工程应用中较易实现,具有一定的实际意义和较高的应用价值。3 仿真结果与分析

4 实验结果与分析

5 结束语
