微型电流传感器AMR探头芯片研究与测试
2020-11-18王茂励董振振钟贻兵程广河
王 浩,王茂励,董振振,钟贻兵,程广河
(1.青岛理工大学信息与控制工程学院,山东青岛 266520;2.齐鲁工业大学(山东省科学院),山东省计算中心(国家超级计算济南中心),山东省计算机网络重点实验室,山东济南 250014;3.曲阜师范大学信息与控制工程学院,山东日照 276800;4.山东航天电子技术研究院,山东烟台 264000)
0 引言
随着航天技术的进步,电流传感器在航天器中使用的越来越多,电流传感器在航天系统中展现出了越来越重要的使用价值。电流传感器输出模拟电压值,通过A/D转换变成数字信号,并作为遥测数据发送给地面接收站,使科研人员能够实时获取航天器各监测点的电流值,有助于掌握卫星的运行状况,当某部分设备发生故障时,能对故障进行快速定位,并可以通过发送关断指令,避免故障设备对航天器产生进一步损害。例如,电流传感器用于航天器的供配电系统中,就可以掌握航天器的母线电流和各分系统电流。磁致电阻效应是一项重要的科学发现,各向异性磁阻(anisotropic magneto resistance,AMR)是铁磁材料的电阻率随外界磁场和电流方向夹角改变而改变的现象。AMR磁阻效应的磁阻传感器灵敏度高,使用该原理设计的传感器能够在很多领域中使用。在铁磁材料中,NiFe、Nico合金被大量应用以获得AMR磁阻效应。AMR磁阻效应原理制成的传感器目前得到了广泛应用,可以用以制作地球磁场测量、车辆监测、磁存储器探头、接近开关、角度传感器、电流传感器等。而AMR磁阻效应原理制成的电流传感器具有高灵敏度、低温漂的性能,较其他电流传感器相比,有其独特的优势。
1 AMR磁阻电流传感器总体方案
本文基于零磁通原理来设计电流传感器。被检测电流所产生的磁场作用于AMR磁阻芯片,AMR磁阻芯片就会有感应信号输出,该信号经放大,送至功率放大电路,转变为电流值,该电流为补偿电流。补偿电流流过补偿线圈,也会产生作用于AMR磁阻芯片的磁场,补偿电流产生磁场和被检测电流产生磁场方向相反,所以AMR磁阻芯片的输出电压会降低。当补偿电流产生磁场和被检测电流产生磁场相等时,补偿电流达到稳定值。这就是AMR磁阻电流传感器零磁通检测的原理。补偿线圈的电流流过采样电阻,输出线性对应的标准电压信号,从而实现了对被检测电流的测量。AMR磁阻电流传感器总体方案框图如图1所示。

图1 传感器总体方案设计框图
2 传感器AMR探头芯片设计
2.1 AMR探头芯片的Barber电极设计
AMR探头芯片是传感器的核心芯片,其将载流带中电流产生的磁场转换为电信号。普通的AMR探头由于是由坡莫合金材料制成的AMR电阻,如图2所示,磁场方向与内部电流方向夹角为90°,当磁场与图中反向反转180°时,与内部电流方向的夹角依然为90°,完全不同方向的磁场引起坡莫合金电阻的磁阻变化是相同的,所以普通的AMR探头是不能分辨外加磁场的方向性的。

图2 无Barber电极的磁阻
为了满足航天器对传感器线性度和灵敏度的要求,本文选用有Barber电极的磁阻。Barber电极通过在坡莫合金材料制作成的电阻中加入铝材料,由于铝材料与坡莫合金的阻抗不同,所以内部电流路径会优先选择阻抗低的铝材料,其电流流向将发生改变,从而使得外部磁场与内部电流方向的夹角产生了变化。如图3所示,坡莫合金材料做成的电阻设计为带状结构,Barber电极与电阻的长带状方向成45°角,电源电流流过带状电阻,会优先选择阻抗小的通路,同时用最短路径通过阻抗高的通路,因为内部电流的方向垂直于Barber电极方向,与电阻的长带状方向也成45°角,通过这种设计,图2中同样的磁场方向,与内部电流方向的夹角,从90°变化为45°,而磁场方向发生180°翻转时,其余电阻内部电流方向夹角变化为135°夹角,而磁阻元件输出曲线为余弦函数,两者幅度相等,但正负号相反,从而实现了对方向性的识别。
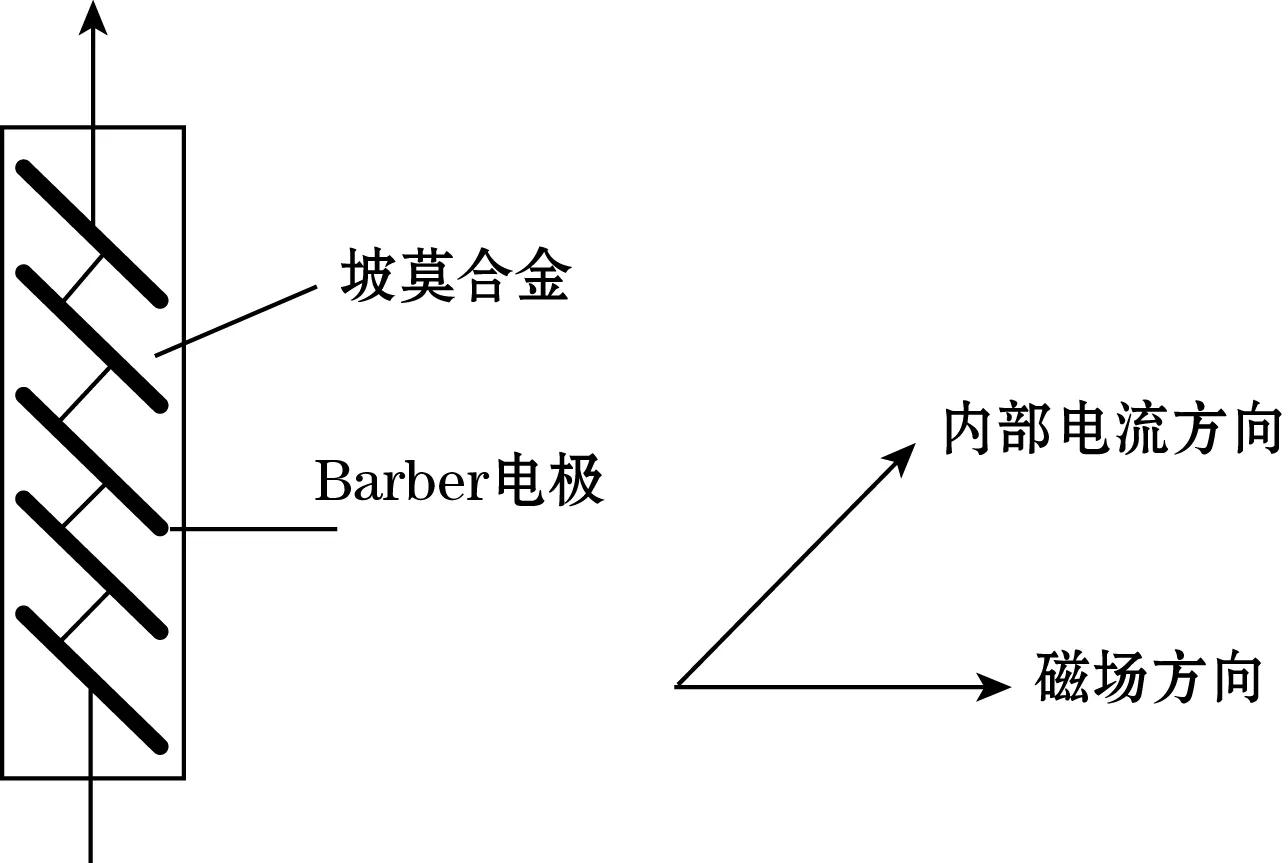
图3 有Barber电极的磁阻
2.2 AMR桥式电路
将AMR探头芯片设计为一个惠斯登电桥,电桥的4个桥臂电阻均由坡莫合金材料制成,通过几何设置方法,设计2个半桥,分别位于沿中心线对称的位置,通过设计每个桥臂电阻的Barber电极,使每个桥臂的方向相反,对应不同的电阻值变化方向(如图4所示),有效提高灵敏度。
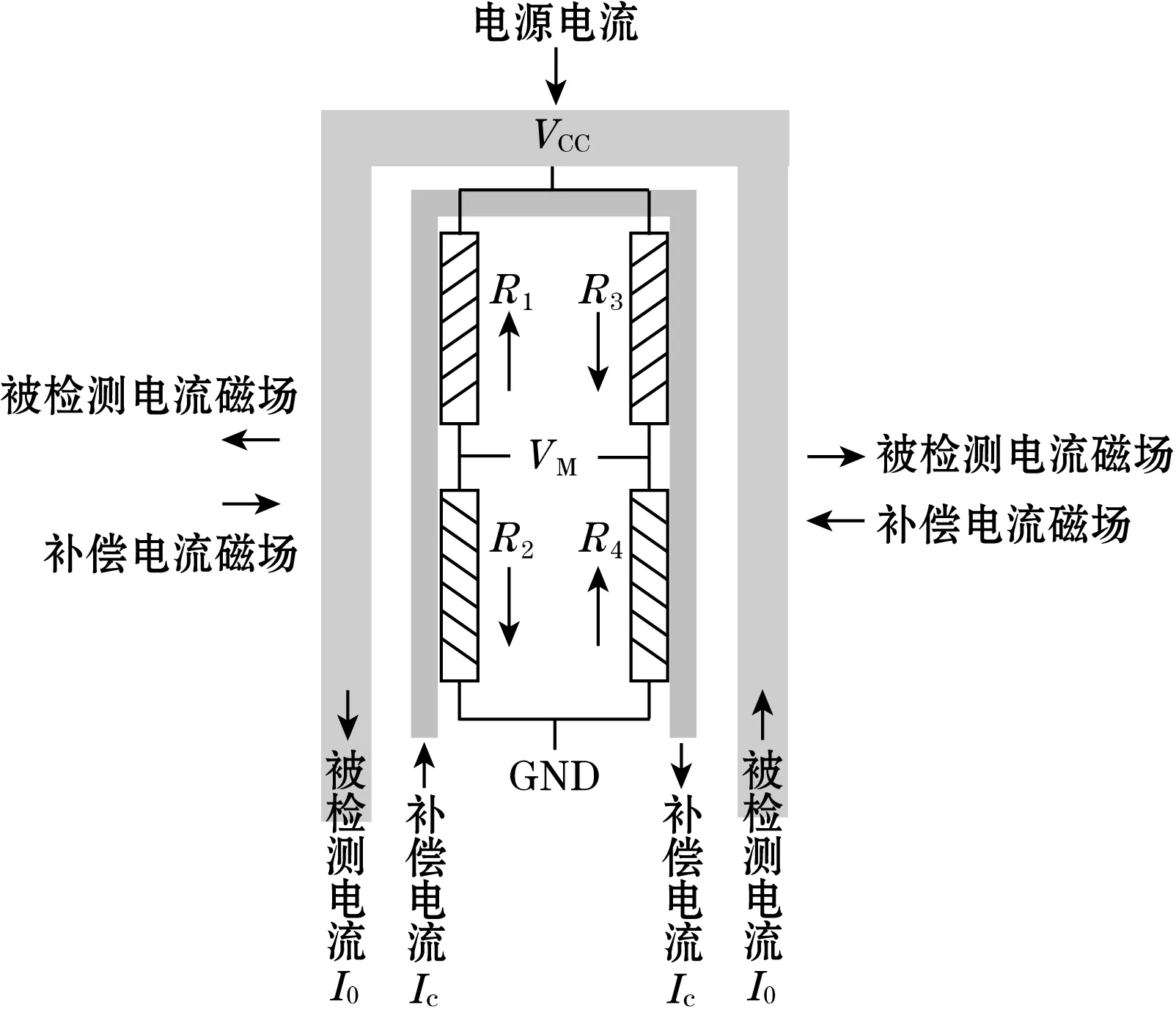
图4 桥式电路工作示意图
R1~R4是4个桥臂电阻,通过VCC为惠斯登电桥供电,当载流带中有如图4所示方向的被检测电流时,因为Barber电极的设置,外磁场与桥臂电阻中的电流方向夹角存在差异,使得R1、R4电阻阻值增大,而R2、R3电阻阻值下降(如图4箭头所示方向),桥式电路产生差分电压信号输出,惠斯登电桥的输出电压为
(1)
式中:VM为惠斯登电桥输出电压,V;VCC为惠斯登电桥输入电压,V;R1~R4是4个惠斯登电桥桥臂电阻,Ω。
若4个桥臂的电阻相同,R1=R2=R3=R4=R,代入式(1)可得:
(2)
此时,VM=0,电桥平衡,输出电压为0。当载流带中有被检测电流时,R1~R4阻值发生变化,假设4个桥臂电阻性能完全一致,如前面所述,R1、R4的阻值增大ΔR,R2、R3的阻值下降ΔR,式(2)变为:

(3)
式中ΔR为2个桥臂电阻阻值的改变值,Ω。
在调理电路的作用下,传感器会在补偿电流线圈中形成与被检测电流方向相反的电流信号,其余被检测电流产生的磁场恰好相反,因其补偿线圈封装在芯片内,与各桥臂的距离远远小于载流带与各桥臂的距离,所以用小的电流就能补偿被检测电流产生的磁场,当两者达到平衡,R1~R4回到接近外磁场为0时的阻值,桥式电路的输出接近于0。
此外,AMR探头芯片设计为惠斯登电桥有较强的抗干扰性能。因为载流带为U型结构设计,所以在载流带中流过电流时,R1、R2所受到的磁场方向与R3、R4的恰好相反,所以惠斯登电桥能够输出差分电压信号。AMR探头芯片的尺寸很小,对于外界干扰磁场来说,可近似的看为一点,所以其受到的干扰磁场的方向和大小近似相等,如图5所示。

图5 探头的抗干扰原理
假设外界干扰磁场方向如图5所示,同样因为Barber电极的设置,如图5中箭头所示,R1、R3阻值升高,R2、R4阻值下降,而因为2个桥臂的材料与尺寸具有高度的一致性,2个半桥的变化近似相等,AMR探头芯片的差分输出没有变化。通过这种设计,使传感器具有良好的干扰能力。
2.3 AMR探头芯片的偏置磁场
因为AMR磁阻芯片的输出与内部磁化方向与电流方向夹角有关,所以,磁阻传感器有2个稳定工作特性曲线。因此假如有外加与坡莫合金内部磁化相反的强磁场干扰,薄膜合金工作特性曲线就会跳变,从正极性输出变为负极性输出,即坡莫合金内部被反向磁化。为了保证磁阻芯片的输出电压为设计值,所以需要给磁阻元件添加偏置磁场。通过在磁阻2个半桥的旁边,添加2个条形的永磁体,如图6所示。永磁体A和永磁体B平行方式,且N极与S极方向一致,从而形成相应方向磁力线,给半桥A和半桥B施加恒定的偏置磁场,从而控制惠斯登桥式电路的灵敏度和线性度,并增加了抗干扰能力。

图6 永磁体为芯片提供偏置磁场示意图
3 探头芯片测试
3.1 测试平台建立
整个测试平台由安捷伦数字电源、安捷伦数字万用表、精密电流源、PC机组成。安捷伦数字电源可以提供稳定的工作电源;安捷伦的数字表能实现实时采集,并能通过串口与PC机通讯;精密的电流源的电流输出精度控制在选定量程的3以内,同样能通过串口与PC机通信;PC机设计单路测试软件一套。软件通过串口控制精密电流源输出制定的电流值,并可读取安捷伦数字万用表采集到的电压值,在指定输出的多点电流值,采集相对应的电压值。
3.2 补偿线圈加电流线性测试
补偿线圈加电流源测试连接方式如图7所示,电源为AMR芯片的惠斯登电桥供直流电压,精密电流的电流输出回路接芯片的补偿线圈,万用表采集惠斯登电桥的输出电压。

图7 芯片的补偿线圈加电流测试
给补偿线圈加正向电流做线性测试,测试电流范围0~20 mA,均分11个测试点,分别为0、2、4、6、8、10、12、14、16、18、20 mA。用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,最后通过最小二乘算法,计算本次测量的线性度其结果如表1所示。表1中X为输入电流,Y为输出电压。

表1 补偿线圈正向电流线性测试
通过表1的原始数据和中间计算数据,可以求出其线性度为0.47%。
给补偿线圈加反向电流做线性测试,测试电流范围0~20mA,均分11个测试点,分别为0、2、4、6、8、10、12、14、16、18、20mA。用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,并对数据进行线性分析,其结果如表2所示。
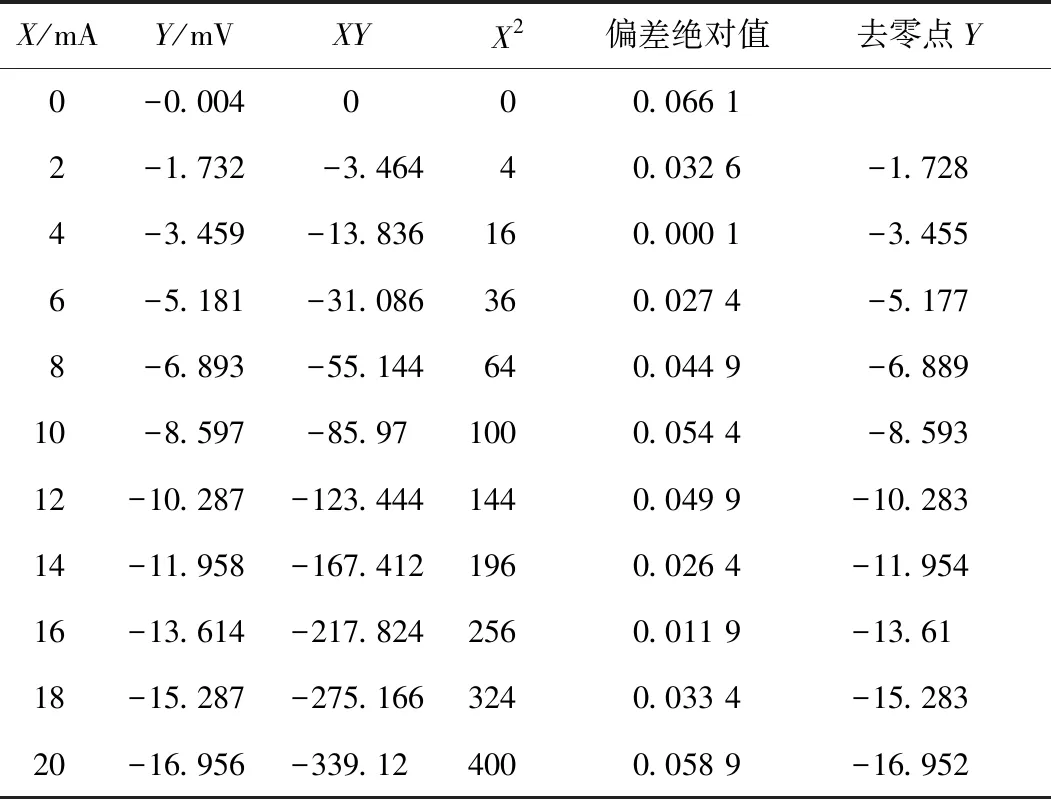
表2 补偿线圈反向电流线性测试
通过表2的原始数据和中间计算数据,可以求出其线性度为-0.39%。
分析结果可以看出,AMR探头芯片可以线性测量补偿电流产生的磁场,无论加正向电流,还是加反向电流,其线性度绝对值均在1%以内。
3.3 载流带加电流线性测试
载流带加电流测试连接方式如图8所示,电源为AMR芯片的惠斯登电桥供直流电压,精密电流源的电流输出回路接芯片的的载流带,万用表采集惠斯登电桥的输出电压。

图8 载流带加电流测试
给载流带加正向电流做线性测试,测试电流范围0~50 A,均分11个测试点,分别为0、5、10、15、20、25、30、35、40、45、50 A。用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,并对数据进行线性分析,其结果如表3所示。

表3 载流带加正向电流线性测试
通过表3的原始数据和中间计算数据,可以求出其线性度为-0.87%。
给载流带加反向电流做线性测试,测试电流范围0~50A,均分11个测试点,分别为0、5、10、15、20、25、30、35、40、45、50A。用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,并对数据进行线性分析,其结果如表4所示。

表4 载流带加反向电流线性测试
通过表4的原始数据和中间计算数据,可以求出其线性度为1.09%。
分析结果可以看出,AMR芯片的载流带加电流测试的线性度,与补偿线圈加电流测试相比,线性度稍差,其线性度绝对值在1%左右,但仍可说明AMR芯片能够线性检测载流带中电流产生的磁场。在测试过程中,可以发现,电路板整体发热,载流带在流过电流时,因自身阻抗导致产生热耗,随着电流增大,电路板温度上升较快,芯片因发热导致温漂,所以影响了芯片输出,导致线性度变差。
3.4 磁平衡工作状态测试
本课题研究的磁阻电流传感器的AMR探头芯片,工作在闭环状态下,当达到磁平衡时,被检测电流流过载流带产生的磁场,被补偿线圈中的补偿电流产生磁场相抵消,AMR芯片输出接近于0,整个闭环也达到平衡,所以磁平衡的稳定性,是考核AMR芯片的重要性能。使用2台高精度电流源,一台给载流带供被检测电流,另一台给补偿线圈供补偿电流,令载流带流过50 A被检测电流,调节另一台精密电流源的输出电流大小,AMR芯片的输出电压接近于0,记录芯片的当前输出,并保持2 h,并记录2 h后的输出电压值,测量结果如下表5所示。

表5 磁平衡稳定性测试数据
从表中可以看出,保持2 h,传感器的输出一直稳定的工作在磁平衡状态下,输出仅仅变化了5 μV。通过以上测试可以发现,AMR探头芯片的输出与载流带中的电流大小、补偿线圈的电流大小均为线性对应关系,可以有效的检测两者产生的磁场,而且补偿线圈中的电流可以有效的补偿载流带中电流产生的磁场,AMR探头芯片满足本课题的需求。
4 结束语
本文针对航天器微型电流传感器,对其探头芯片进行了研究,提出了AMR芯片的Barber电极设计,提出了AMR桥式电路,并分析了这种电路设计形式抗干扰的原理,并为探头芯片提供了偏置磁场方案,最后对芯片进行了详细测试,介绍了测试方法、测试平台,在补偿线圈和载流带分别加电流进行线性测试,并模拟产品实际工作的磁平衡状态,测试结果,AMR芯片线性度绝对值在 1%左右,说明探头芯片设计合理,各方面性能优异,可以很好的用于闭环电流传感器。
