基于小波变换的水下鱼群图像增强算法
2020-11-16吐尔洪江阿布都克力木
何 笑,吐尔洪江·阿布都克力木,贺 欢
(新疆师范大学 数学科学学院,新疆 乌鲁木齐 830017)
0 引 言
水下图像是海洋信息的重要载体,但是复杂的水下环境及恶劣的光照条件使得获取的水下图像出现严重的质量退化,很难得到对人类有用的信息[1-8]。由于水体散射导致水下图像的对比度很低、纹理模糊,细节信息不够突出,水中的杂质和悬浮物也会导致图像拍摄中出现较大的噪声并且放大后向散射的影响,因此水下图像质量的退化极大地影响了其应用[9-12]。当前,很多研究者为了解决这些问题,提出了许多改善水下图像质量的方法,如水下图像增强方法以及水下图像复原方法。文献[13]提出了一种基于非抽样小波变换的多尺度(MSR)Retinex参数融合的真彩色图像增强算法;文献[14]在水下光成像模型的基础上,利用改进的暗通道先验算法对图像进行清晰化处理,并结合MSRCR算法对图像进行颜色恢复,该算法提高了图像的清晰度和对比度。传统的增强方法,如直方图均衡、直方图规定化、限制对比度直方图均衡化、自适应直方图均衡化等[15-16],能够通过调节图像灰度值范围,在一定程度上增强水下图像的对比度,但在局部依然存在过度提亮的现象,不适于人眼观测。小波变换[17-19]可以对图像特征进行更精确的局部描述和分离,同时可以采用不同的方法来增强不同频率范围的图像特征,能够突出图像细节,同时也能抑制噪声。
文中所提方法对大量水下鱼群图像进行了实验分析,为避免主观性和经验主义带来的局限性,根据主观效果及图像的清晰度,图像的峰值信噪比作为对水下图像的客观评价方式,并与目前图像处理中的增强方法进行对比。实验结果表明,该算法在主观上能有效改善水下图像的视觉效果,客观指标中,图像的清晰度,峰值信噪比都有大幅提升。
1 算法原理与分析
小波变换[20]把图像分解成低频图像和高频图像,它们分别代表了图像的不同结构。对图像进行小波分解后,可分为LL,LH,HL和HH子频带,其中LL反映的是低频信息,LH和HL反映的是水平方向的高频信息和垂直方向的高频信息,HH反映的是对角方向的高频信息。低频部分反映的是平滑区,而边缘、细节、噪声一般存在于高频部分。因此,小波变换能在不同的尺度上采用不同的方法来增强不同频率范围内图像的细节分量,再把处理后的系数进行小波逆变换,这样就能够在突出图像细节特征的同时,有效抑制图像噪声的影响,使图像轮廓更加突出。此外,小波变换完善的重构能力,能保证信号在分解过程中没有信息损失,也不会产生冗余信息。
2 算法实现
2.1 小波域低频系数处理
文中采用改进双边滤波的Retinex图像增强算法[21]对图像经小波分解后的低频系数进行光照图像估计,有效避免了光晕现象。由Retinex理论可知,人类观察到的图像是由光照图像和反射图像两部分组成。
S(x,y)=R(x,y)×L(x,y)
(1)
其中,S(x,y)为原始图像,R(x,y)为反射图像,L(x,y)为光照图像。
光照图像反映了图像能达到的动态范围,包括光照强度和环境等信息,反射图像反映了图像纹理和轮廓等信息。Retinex算法为使图像不受光照环境的影响,消除原始图像中的光照图像,经对数域转换后得到能反映图像本质的反射图像。反射图像公式如下:
R(x,y)=logaS(x,y)-logaS(x,y)*F(x,y)
(2)
其中,F(x,y)为高斯核函数,光照图像L(x,y)由原始图像与高斯核函数卷积得到。
为了消除单尺度Retinex算法产生的光晕现象,将双边滤波的滤波核代替高斯核函数。在图像像素值变化程度较大的边缘区域,同时考虑空间域和像素值域,在保持图像边缘信息的同时有效避免边缘处由图像亮度差异较大而引起的光晕现象。
双边滤波的滤波核由空域核与值域核的乘积组成,公式如下:
(3)
其中,ID(i,j)为输出图像,I(k,l)为原始图像,w(i,j,k,l)为空间域与像素范围域的核函数,公式如下:
w(i,j,k,l)=wd(i,j,k,l)×wr(i,j,k,l)
(4)
改进的公式如下:
w(i,j,k,l)=[1-
(5)
其中,σd为距离差尺度参数,σr为亮度差尺度参数,p为滤波窗口参数。
在空间域处,设置滤波窗口参数p,原双边滤波的滤波窗口大小为2p+1,改进后的滤波窗口以滤波中心的像素点为中心,以滤波参数p为半径的圆形区域。当滤波邻域内像素点与滤波中心像素点距离小于滤波窗口参数时,判断该像素点位置在半径范围内,则该像素点空间域与像素值域同时作用,在平滑噪声的同时保持图像的边缘信息。当滤波邻域内像素点与滤波中心像素点距离大于滤波窗口参数时,认定该点距离中心像素点较远,对该像素点不作处理,以消除该像素点对图像边缘的影响。使用改进双边滤波算法得到的反射图像,不仅有效地保持边缘细节,且更好地去除了光晕现象。
2.2 小波域高频系数处理
Sobel算子对噪声具有平滑作用,能提供较为精确的边缘方向信息,因此,文中在实验中采用Sobel算法对水平高频系数和垂直高频系数分别进行边缘检测。Sobel算子是一离散性差分算子[22],用来计算图像亮度函数的灰度的近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
Sobel的卷积因子是:
该算子包含两组3×3的矩阵,分别为横向矩阵和纵向矩阵,将两组矩阵分别与图像作平面卷积,即可分别得出横向和纵向的亮度差分近似值。如果以A代表原始图像,Gx和Gy分别代表经横向和纵向边缘检测的图像灰度值,*表示卷积,那么其公式如下:
(6)
图像的每一个像素的横向和纵向灰度值通过以下公式结合,来计算该点的灰度大小:
(7)
通常,为了提高效率,使用不开平方的近似值:
|G|=|Gx|+|Gy|
(8)
2.3 图像融合
图像融合[22-26]是用特定的算法将两幅或多幅图像综合成一幅新的图像。由于能利用两幅或多幅图像在时空上的相关性及信息上的互补性,并使得融合后得到的图像对场景有更全面、清晰的描述,因此融合结果更有利于人眼的识别和机器的自动探测。文中对处理过的图像进行线性加权融合,融合公式如下:
F(x,y)=mf1(x,y)+(1-m)f2(x,y)
(9)
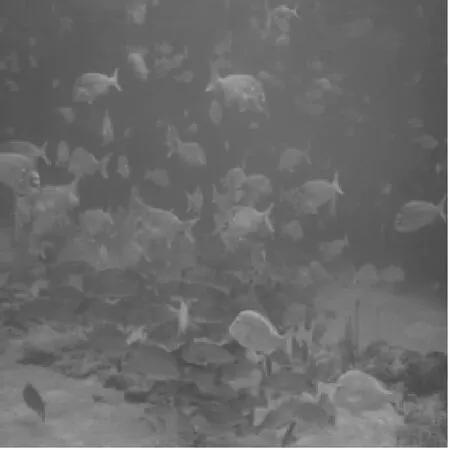
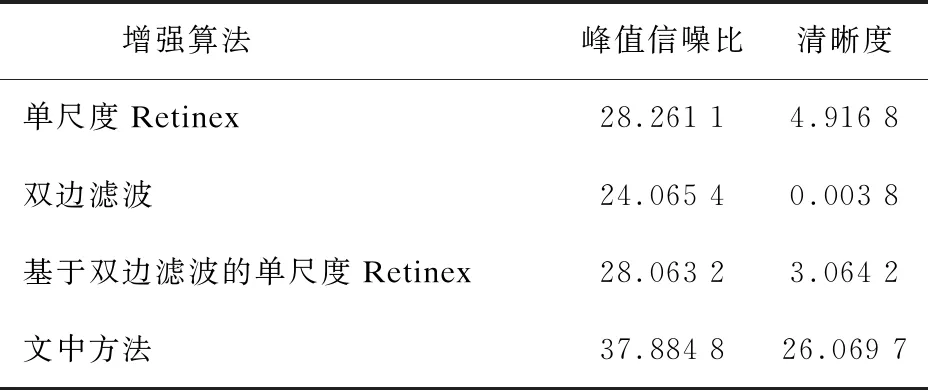
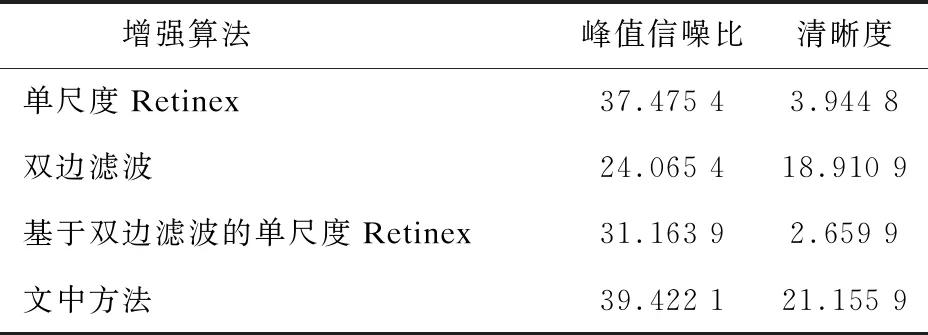
其中,F(x,y)是融合后的图像,f1(x,y)是处理后的第一幅图片,f2(x,y)是处理后的第二幅图片,m是控制系数,且0 (1)对原始图像进行自适应直方图均衡增强,然后进行小波分解; (2)对产生的低频部分分别进行改进的双边滤波的Retinex处理和直方图均衡处理得到f1(x,y)与f2(x,y),再利用式(9)得到增强的低频图像; (3)对增强后的图像进行小波逆变换,得到重构的增强图像; (4)对原始图像进行小波变换,对产生的水平高频图像与垂直高频图像进行边缘检测; (5)对处理后的图像进行小波逆变换,得到重构的边缘图像; (6)对第三步与第五步的结果图利用式(9)进行加权融合,得到最终图像。 为了检验文中算法对于水下图像的增强效果,选取大小为250*250、jpg格式的水下鱼群图像作为实验对象,实验平台为MATLAB R2016a。实验中,低频系数采用改进双边滤波的Retinex算法估计光照图像,窗口参数为:p=3(滤波窗口大小为7),亮度差尺度参数σr=0.001,分解与重构的小波基函数为db3和db1。 实验结果如图1和图2所示。 (a)原图1 (a)原图2 从两组实验的结果可以发现,这几种方法均不同程度地提升了图像的对比度,图像细节、纹理信息进一步得到了改善。其中单尺度Retinex方法对部分细节描述不足,图像的总体对比度没有明显提高;双边滤波方法使得图像的模糊程度加深,不利于人眼观测;基于双边滤波的单尺度Retinex方法对图像的对比度、亮度整体提高,但依然存在部分细节模糊的情况,且噪声增大,信息丢失严重,对人眼观察不友好;文中方法获得了最佳的视觉效果,较好地呈现图像中的细节信息,有效突出水下鱼群和岩石、海草部分,在有效提升对比度的同时抑制了噪声,利于人眼观测更多的有用信息。 从视觉效果来分析实验具有一定局限性,带有观测者的主观性和经验主义,很难说明该算法得到的结果图的质量的好坏。然而,在实际的应用中,水下图像包含着非常丰富的地貌地形以及其他生物信息。因此,表1、2中的数据给出了几种增强算法的客观评价。 文中选取图像的峰值信噪比和图像的清晰度作为客观评价的指标。图像的峰值信噪比是描述图像质量好坏的常用评价,峰值信噪比越大,表明图像失真越少,图像的质量越好,反之则说明图像质量差;图像的清晰度是衡量图像质量优劣的重要指标,能够较好地与人的主观感受相对应,图像的清晰度不高,则表明图像是模糊的,图像的清晰度越高,说明图像越清晰,图像的质量越好。 根据表1与表2中的数据结果,在客观上说明了各个增强方法的结果图的差异,而且文中所提的增强方法的实验结果图的峰值信噪比和清晰度都要高于其他的增强方法,表明该算法要优于其他算法。 表1 几种增强算法的客观评价(图1) 表2 几种增强算法的客观评价(图2) 为了改善水下图像的视觉效果,提出了一种基于小波变换的水下鱼群图像增强算法,该算法在突出感知重要内容的边缘信息的同时,抑制了高频噪声,使图像的光照度均匀化,减轻了光晕现象,突出了更多的细节信息,并提高了图像的对比度,更利于人眼的观测。但在实际应用中还会有相对恶劣的环境,比如水下光照的强度,目标与背景很相似,还有在浑浊水域中很难分清目标物与其他生物等,都会影响处理水下图像质量的效果,因此对于文中算法来说,增强强光下的目标物以及浑浊水域中的目标物还需进一步提高。3 算法实现流程
4 仿真实验与分析

5 结束语
