大型多功能摇摆表演船的设计与实施
2020-11-13丁相文薛根昌
原 博,李 超,丁相文,薛根昌
(北京北特圣迪科技发展有限公司,北京 100028)
随着国民经济的飞速发展,人民生活水平日益提高,文化娱乐产业的发展日新月异,演艺表演形式也日趋多元化,标新立异的机械装置表演成为当前演出追逐的热点。这是舞台机械行业的机遇,也是挑战。
在模拟海战的表演形式中,“表演船”是最具代表性的装置之一。为了更好地模拟船体在实际航行中的动作、遭遇风浪的场景以及战争场面等多元化的表演形态,“表演船”需要嵌套各种机械动作来满足具体功能的需要。
本文以某水秀项目为例,详细介绍大型多功能摇摆表演船(以下简称“摇摆船”)装置的动作方案,解析实现动作方案的设计思路、工艺要求、机构原理及功能。
1 动作方案及运动姿态
船体长度18 m、宽度5 m、高度5.5 m,桅杆高度8 m,船体动载30 kN。图1所示为船体正常姿态效果图。
1.1 模拟风浪模式船体的运动姿态
(1)前后摇摆
船体绕其视觉形心位置前后摇摆。摇摆行程±10°,摇摆周期16 s,额定动载30 kN。
(2)左右摇摆
船体绕其视觉形心位置左右摇摆。摇摆行程±5°,摇摆周期7 s,额定动载30 kN。

图1 船体正常姿态效果图
1.2 模拟海战场面的运动姿态
图2所示为船体战争姿态的效果图。
船体在海战场面的动作除了前后摇摆、左右摇摆之外,还包含以下两个动作。
(1)船体断裂
船体前端绕底部摆动。摇摆行程0~30°,摆动时间16 s,额定动载10 kN。
(2)桅杆倒塌
中间桅杆绕其底部旋转倾倒。桅杆行程0~90°,倒下时间7 s,额定动载5 kN。

图2 船体战争姿态效果图
2 设计思路
2.1 整体工艺要求
众所周知,水中装置的关键是动力来源,并且还要保证水中装置运行的安全和可靠,避免漏电等安全隐患,一般采取两种方案。
(1)动力系统外置。电气设备隔离后,利用钢丝绳、链条等方式,将动力传递至水中的动作机构和设备,典型设备就是水中升降台、水中移动车台等。
(2)利用液压系统直接在水中进行驱动。
以上两种动力和驱动布置方式都有其局限性。动力系统外置式的布置方式,对于动作机构复杂的设备极其不适用,常常因为机构过于复杂和冗余无法设计,只能改为液压驱动的方式。而液压驱动一方面成本较高,另一方面常常因为漏油等原因影响水质。尤其是对水质环境要求较高的特殊工况,不适合使用液压驱动。
为了使动力系统和机构在满足使用条件和工况的情况下更为简单,摇摆船整体工艺平面布置如图3所示。基础条件进行干湿隔离,将整体的动力系统布置在干区,并进行防水处理。
这种布置方式在不影响观演效果的前提下,将整个设备作为干区设备进行正常设计,所有机构采用电动直驱,经济性好。
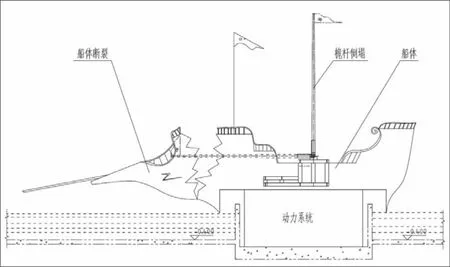
图3 摇摆船工艺平面布置图
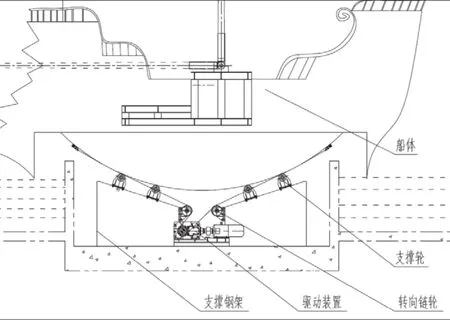
图4 船体前后摇摆动作原理
2.2 装置的整体动作方案
船体所有动作包含前后摇摆、左右摇摆、船体断裂和桅杆倒塌四个动作。为了满足模拟动作的实际效果,四个动作层级嵌套布置,即船体断裂和桅杆倒塌两个动作相互独立,嵌套在左右颠簸的船体上。以上三个动作由船体带动,实现整体的前后摇摆。
3 各动作的机构设计
3.1 前后摇摆
如图4所示,摇摆船体有若干组支撑轮支撑并导向,由电机减速机带动链轮旋转,从而形成圆周方向的牵引力,实现整个船体的前后摇摆动作。配合限位开关的电气控制,完成前后摇摆的行程控制。
前后摇摆的回转中心设置在摇摆船的视觉形心处。既满足实际模拟动作的真实效果,使整个船体的摆动更加符合力学规律,动作更为流畅,也可使得整体设计无偏载,各部分受力更为均衡,大大降低动力系统的功率。
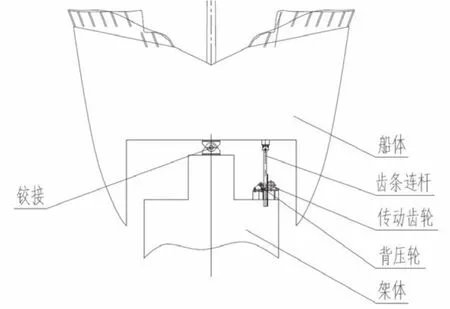
图5 船体左右摇摆动作原理图
3.2 左右摇摆
船体左右摇摆的动作原理如图5所示。左右摇摆动作机构采用齿轮齿条传动,船体摇摆的回转中心设置在其理论形心。这种机构设计方式在平衡状态下,驱动齿条连杆受力很小,驱动功率大大减小。
船体的摆动幅度较小(±5°),左右摇摆动作设置一对行程开关,一个零位开关,通过电控简单的设置(速度曲线的拟合),船体与连杆铰接处的运动便可实现近似的单摆运动,即简谐振动。根据简谐振动的运动特性可知,这种机构形式动作和谐、流畅,符合常规船体摆动时的力学特性,观赏效果真实。
3.3 船体断裂
船体断裂的动作原理如图6所示。船头与船体之间由铰链相连,船头的断裂动作由一组电动推杆的伸缩来实现,电动推杆之间机械同步,电动推杆上设置位置开关,用来控制整个动作的行程。
3.4 桅杆倒塌
桅杆倒塌的工艺不同于旗杆的倾倒设计。旗杆倾倒基本不受风阻的影响,模拟该动作只需实现旗杆自由状态下的自然倾倒。而桅杆的倒塌,受风帆的影响,倒下速度相对较小,也较为平稳。因此,在进行模拟时,需要保证桅杆匀速倒下。
桅杆倒塌的动作原理如图7所示。整个机构由卷扬机驱动,卷扬机倒挂固定于船体钢结构的下表面,采用上出绳,使得整个动作期间卷扬机出绳角度基本不变,倒塌速度基本为匀速。这种工艺设计,卷扬机的功率和钢丝绳的受力,仅需考虑桅杆倒塌时力矩最大状态时的瞬时功率和受力即可(因为卷扬机的出绳角度设计为基本不变,即整个驱动的反向力臂基本不变)。桅杆有铰接结构固定于船体钢结构的上表面,使桅杆可以自由地绕铰接点旋转;桅杆下部设置配重,可降低驱动部件的受力及功率。
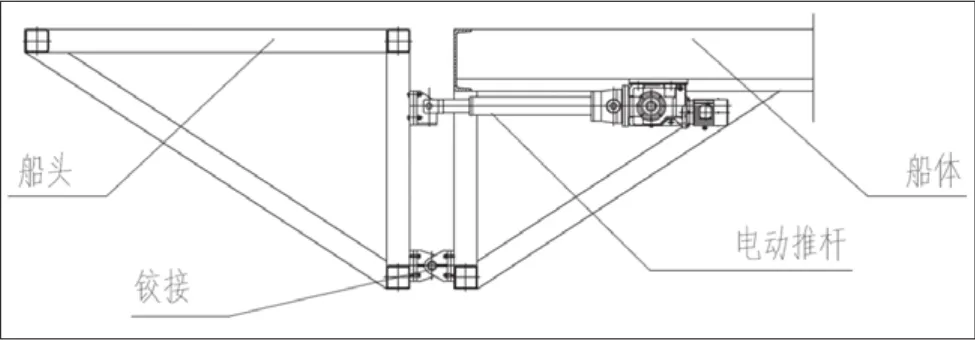
图6 船体断裂动作原理图
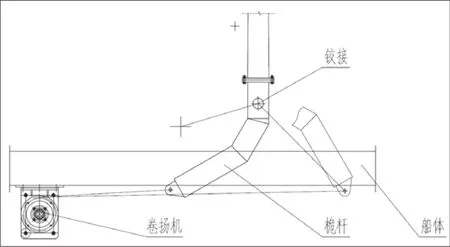
图7 桅杆倒塌动作原理图
4 装置的整体设计方案
该摇摆船的整体设计方案如图8所示。所有动作按照层级嵌套布置,均可实现单独控制。在各动作行程范围内,为整个摇摆船在战争场面中的姿态带来意想不到的随意性,每个动作设置各自的零位开关,可以让船体在表演完成后,各个动作迅速归零,恢复正常航行状态。

图8 摇摆船布置图
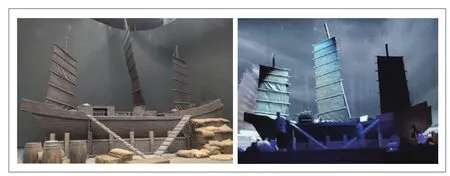
图9 摇摆船实体效果
船体各个动作设计基本做到受力平衡,使得船体静态状态下,各个驱动基本不受力,一方面便于检修和维护,另一方面也是对各运动机构常态下的保护,使得各驱动具有更高的经济性和实用性。
5 实施效果
图9为该水秀项目摇摆船的最终实施效果。实施完工后,主体结构约18 t,美工包装后约22 t,总功率33.9 kW。摇摆船能够实现前后摇摆、左右摇摆、船体断裂以及桅杆倒塌四个动作,四个动作分别由一台电机独立驱动。各动作之间互不干扰,可以模拟完成风浪运行和海战场面等场景,运行流畅、效果逼真,满足工艺设计的要求,且具有极高的观赏价值。
