高地隙底盘沉陷模型的建立与验证
2020-11-11林伟石毅新蒋蘋胡文武
林伟,石毅新,蒋蘋,胡文武
高地隙底盘沉陷模型的建立与验证
林伟1,2,石毅新1*,蒋蘋1,胡文武1
(1.湖南农业大学机电工程学院,湖南 长沙 410128;2.益阳职业技术学院,湖南 益阳 413055)
针对南方水田泥脚深致作业机械行驶通过性差的问题,以高地隙动力底盘(离地间隙为1 100~1 500 mm)为研究对象,通过牵引性能试验,研究水田动力底盘的沉陷特性。在载荷800~1 100 kg条件下,以车轮载荷和滑移率为试验变量,以车轮沉陷系数、驱动系数和挂钩牵引力系数为试验指标,建立了高地隙底盘沉陷模型。结果表明,模型中挂钩牵引力系数与驱动系数成正比,与沉陷系数成反比;利用田间试验获得该模型修正参数,修正系数为-0.30~ -0.19,与载荷呈正相关,拟合值与田间试验值的误差小于5%。
高地隙底盘;牵引性能;沉陷预估;挂钩牵引力
南方水田作业机械在行驶过程中车轮易出现过度沉陷,造成行驶阻力增大,通过性受到影响,因此,平衡作业机械牵引性能与车轮沉陷之间的关系,对保障作业机械通过性至关重要。
有关沉陷理论的研究表明,不能单独将沉陷量作为判断底盘通过性的唯一指标,需要将挂钩牵引力和沉陷结合在一起考虑,才能评价底盘所处环境的安全程度[1-4]。BEKKER[5]的半径经验模型可以计算出车辆通过松软地面的静载沉陷量,但该模型不能计算出车轮滑转时的沉陷量和重复通过地面的沉陷量。LYASKO[6]建立了滑转沉陷计算模型,但该模型没有考虑轮胎的结构参数以及牵引力对沉陷模型的影响。SENATORE等[7]测量分析轻量载荷的车轮与土壤的接触应力,并对车轮下土壤颗粒的位移和速度进行了研究和分析。唐正义等[8]在Wong-Reece理论计算模型的基础上,通过轮胎与土壤最大接触应力系数及剪切模量来修正该理论模型,可以更准确地预测轻型动力底盘的牵引力系数以及驱动扭矩和沉陷系数,但获取参数的方法较为复杂,在适用性上受限。
笔者通过对车轮-土壤相互作用关系的线性化推导,建立车轮沉陷与挂钩牵引力模型,用于高地隙底盘沉陷量的在线预估,并利用高地隙底盘田间试验数据对模型进行修正和验证,同时提出对高地隙底盘车轮提前沉陷的预估方法。
1 高地隙底盘的结构
如图1所示,高地隙底盘主要由发动机、行走系统、转向系统、控制台及其附件组成。

1 前挂接架;2 柴油机;3 轴向柱塞变量泵;4 控制台;5 液压油箱;6 后挂接架;7 车架底盘;8 链轮减速装置;9 轴向柱塞双排量马达。
高地隙底盘行走系统采用发动机-行走比例电磁式变量油泵直连形式[9-10]。液压马达经过1∶2的链轮箱减速驱动车轮来传递驱动力。举升系统采用4个平行四边形支腿对角安装的底盘与4个液压缸配合完成高地隙底盘的升降与调平[11]。
2 沉陷模型的建立
高地隙底盘驱动轮以速度在田间行走过程中,受到液压马达所提供的驱动扭矩()和土壤对车轮的正应力()和剪应力()的共同作用,产生挂钩牵引力(P),驱动轮沉陷量(),车轮受到地面最大应力与地面垂线夹角为m,如图2所示。

图2 驱动轮受力分析
依据文献[12],基于轮下应力分布的车轮挂钩牵引力为P,车轮载荷为。


式中:为车轮宽度;为车轮直径;1为车轮渐进角;为正应力与地面垂线夹角;()为车轮在该点受到的剪应力;()为车轮与土壤接触范围内任一点受到的正应力。
影响挂钩牵引力的主要土壤因素为内聚力和内摩擦角[3]。由与的关系式=+tan,可得出和的关系。车轮与土壤的作用力、扭矩以及沉陷量可以通过田间试验在线获取。驱动扭矩、沉陷量和挂钩牵引力均是土壤参数和轮胎类型的函数,因此,通过建立三者间的函数关系式,以及驱动扭矩和沉陷量可计算得到挂钩牵引力。
为了建立挂钩牵引力P、驱动扭矩、负荷和沉陷量的函数关系式,对式(1)进行线性化处理。设m为车轮底面在接触范围内最大正应力max与最大剪应力max处,当0≤≤m时,有


当m≤≤1时,有


将式(3)、(4)与(5)、(6)代入式(1),可得

考虑到高地隙底盘田间行驶的极限沉陷情况,可将式(7)简化为
又因1≈4[13-15],则可将式(8)变换为

式(9)即是基于挂钩牵引力(P)、驱动扭矩()、负荷()和沉陷量()4个变量建立的函数关系式,可作为高地隙底盘挂钩牵引力与负荷的沉陷预测模型。
挂钩牵引力系数为P;沉陷系数为/;驱动系数为2();挂钩牵引力系数试验值P,拟合值K=2()-。
由式(9)可知,当车轮载荷()一定时,挂钩牵引力系数与车轮沉陷量()成反比。
3 牵引力性能田间试验
3.1 试验设备
主要试验设备包括:雷沃M704-B拖拉机;液压测试系统(含软件LERO iTest-008SRD1 V4.0.5、液压数据处理软件LERO_HTDAD_V1.0、8通道移动式液压数据采集器CHPM480-05-0C、压力传感器(SR-PTT60-05-0C 0~60 MPa)、流量传感器(SR-CT150-B-B-60~150 L/min));“合众思壮壁虎”北斗GNSS接收机;土壤坚实测试仪(Spectrum SC900);土壤湿度测试仪(TDR-300);数显式推拉力计(HP-50k);ZJ型应变控制式直剪仪等。
3.2 试验方法
试验在湖南农业大学实习教学基地进行。通过土壤的直剪试验和平板承压试验[16],测得土壤的内聚力()为4.14 kPa,土壤的内摩擦角()为10°。试验前将试验区稻茬田块(60 m×20 m)浸泡5 d。使用土壤坚实度测试仪测量浸泡后稻茬田的土壤坚实度。贯入阻力最大值为2 773 kPa,垂直贯入最大深度为400 mm,相对误差不超过10%。
根据沉陷试验要求[17],设定试验区域长50 m,高地隙底盘在试验区域外启动,将发动机油门逐步从怠速位置调至最大位置,行走电子手柄将变量泵排量控制在最大排量,测量马达小排量和大排量下高地隙底盘在试验区域内牵引雷沃拖拉机的牵引力。利用GPS测得底盘运动的实际速度与流量传感器算得的车轮实际转速,计算车轮的滑转率。根据前期土壤坚实度测试结果,可知该试验田的硬底层在300~400 mm,车轮沉陷深度根据每试验一次的行走车辙轨迹,每隔100 mm测量每个点的陷深。
高地隙底盘行走液压系统试验数据采集点如图3所示。布置5个数据采集点,分别采集4个行走液压马达的入口压力、4个行走液压马达出口背压(由于各马达出油口至同步阀入口管道长度相差不大,故可忽略管道压降对所测背压的影响)。将液压测试设备装在各测试点管路中,通过连接线缆与测试仪进行通讯,设定测试仪的测试接口与数据采集频率为10 ms。通过压力传感器采集液压马达的压差(△)计算得到车轮的驱动扭矩。车轮的实际转速利用流量传感器测量,然后通过计算马达的流量得出车轮转速。底盘的实际行驶速度由GPS测速模块测量。车轮滑转率的大小通过改变雷沃拖拉机的载荷与制动力大小来改变。高地隙底盘挂钩牵引力的大小由数显式推拉力计测量得到。
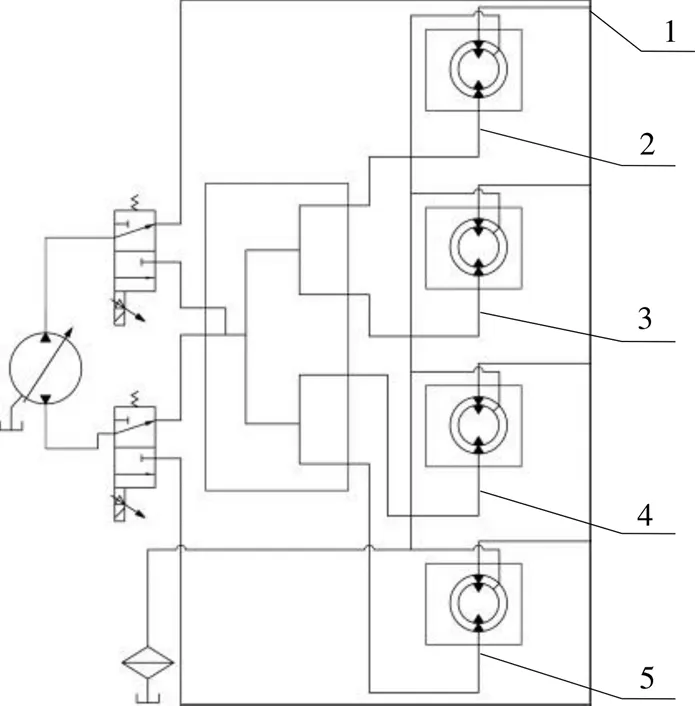
1 马达背压压力采集点;2 左前马达进口压力和流量采集点;3 右前马达进口压力和流量采集点;4 左后马达进口压力和流量采集点;5 右后马达进口压力和流量采集点。
4 模型修正与验证
为验证式(9)模型的准确性,通过田间试验,对式(9)进行修正。试验高地隙底盘车轮采用高花实心橡胶轮胎,轮径1 100 mm,轮宽100 mm,胎面均匀分布40个轮刺,轮刺高度40 mm。通过往高地隙底盘的水箱注水来改变车轮载荷,受限于水箱体积以及后期模型参数的验证,选定高地隙底盘车轮分别在800、900、1 000、1 100 kg载荷条件下进行田间试验。
以高地隙底盘车轮在800 kg载荷下的试验结果为初始值,运用式(9)对挂钩牵引力系数进行拟合,得到拟合值。高地隙底盘车轮在不同载荷下的田间试验测得的滑转率与沉陷系数列于表1。

表1 高地隙底盘车轮在800~1 100 kg载荷下的滑转率和沉陷系数
分析表1可知,在土壤参数基本一致的前提下,车轮载荷一定时,随着车轮滑转率的增大,车轮沉陷系数()随之增大,两者的关系成正比。随着车轮载荷的增大,车轮滑转率下降,但车轮沉陷系数逐渐增大,因此,在设计高地隙底盘时,为保证通过性,减少底盘沉陷,可适当增加轮胎宽度,以增大接地面积,减小接地比压,但高地隙底盘主要用于减少压苗,设计时轮胎宽度需根据预测模型与作物行间距进行综合考虑,以确定相对最优值。
不同载荷下挂钩牵引力系数试验值与拟合值两者存在差异(图4),需要引入修正系数[18],使得拟合的误差最小。
分析图4可知,车轮载荷一定时,挂钩牵引力系数随着驱动系数的增加而增加,即挂钩牵引力系数与驱动系数成正比;因此,设计底盘过程中,可通过适当增加底盘匹配动力和提高传动比,以实现提高驱动系数,进而保证高地隙底盘的牵引力。一定载荷条件下,车轮的挂钩牵引力系数与驱动系数基本呈线性关系,为得到其修正值,进一步提高预测模型的准确度,将式(9)进行一次线性修正,变换为

式(10)中,1、2和3为模型修正参数。
为得到式(10)中参数1、2和3,将式(10)推导成


将800 kg载荷下的试验数据代入式(10),得1=1,2=-1,3=-0.3,也即式(10)修正为

采用相同试验和计算方法,对其他3组载荷进行参数修正,结果列于表2。
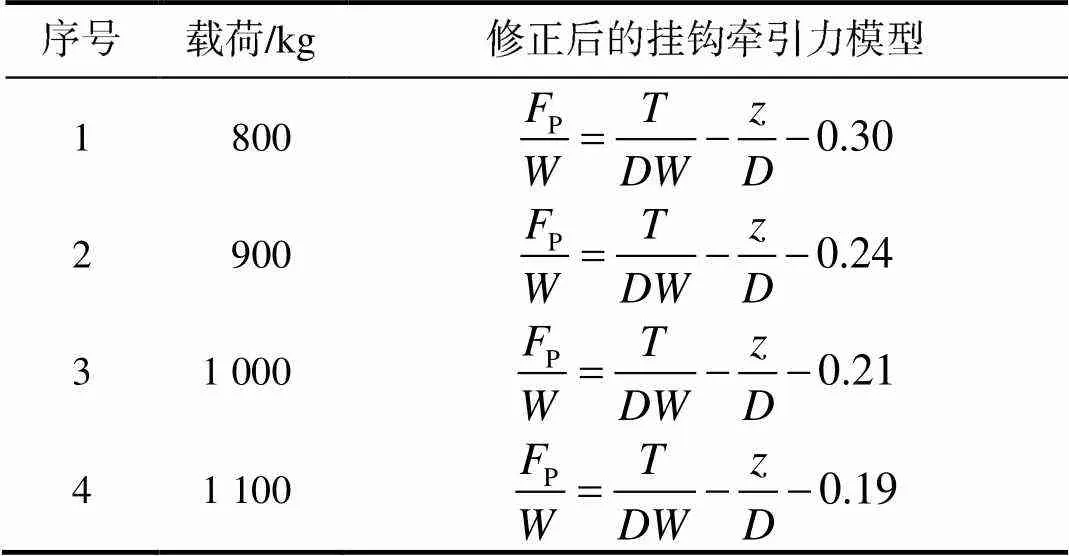
表2 不同载荷下模型的修正
修正后的拟合值与试验值的对比如图5所示。结果试验值与拟合值基本吻合。

图5 修正后的拟合值和试验值的对比
在不同载荷条件下,修正系数3为-0.30~ -0.19,并且随着载荷的增加,修正系数3呈增大趋势。根据试验数据拟合,求得3与载荷的关系式为3= -1.062×10-62+2.26×10-3-1.467。
为验证模型的准确性,分别选取850、950、1 050、1 150 kg载荷进行试验,利用式(11)得到的计算值与田间试验值3如表3所示,可见其最大误差小于5%。

表3 不同载荷下计算式拟合误差
因此,高地隙底盘高花实心橡胶轮在田间的牵引力系数函数确定为

由于高地隙底盘挂钩牵引力在车轮高滑转情况下变化较小,可从已知田间土壤参数初估挂钩牵引力的峰值。通过式(12)沉陷估算函数,可以计算出高地隙底盘发生沉陷时驱动马达的最大压差△max,便于作业时在线数据判读。当高地隙底盘各液压驱动马达在田间作业实时压差值接近计算的最大压差△max时,即可判定高地隙底盘有过度沉陷,应立刻使高地隙底盘停止运动,重新选择高地隙底盘的作业路径。当出现高地隙底盘过度沉陷时,可通过测量马达压差△的最大值,利用式(13)计算车轮的最大沉陷量,预测高地隙底盘过度沉陷时各车轮的沉陷状态,便于操作人员在遥控驾驶高地隙底盘时判断各车轮沉陷状态,以修正田间作业路线。
5 结论
基于车轮-土壤作用模型线性化处理,以高地隙底盘田间试验数据对模型进行修正与验证,得到车轮沉陷预估模型为。
车轮载荷在800~1 150 kg时,随着载荷的增大,3呈增大趋势。根据试验数据拟合求得3与载荷的关系式3= -1.062×10-62+ 2.26×10-3-1.467。
通过模型能计算出高地隙底盘发生沉陷时的驱动马达压力差峰值△max,便于高地隙底盘在线数据判读预估。当高地隙底盘出现过度沉陷,也可以通过在线检测驱动马达压差的峰值,预测此时车轮的沉陷量,便于操作人员及时修正实时行走路线。
[1] 李建桥,邹猛,贾阳,等.月球车轮与月壤相互作用动力学模拟[J].农业机械学报,2008,39(4):1-4. LI J Q,ZOU M,JIA Y,et al.Research on the interaction between lunar rover wheel and lunar soil by simulation[J]. Transactions of the Chinese Society for Agricultural Machinery,2008,39(4):1-4.
[2] 李因武,李建桥,邹猛,等.月壤力学性质对月球车牵引性能影响的模拟[J].农业机械学报,2009,40(1):1-4. LI Y W,LI J Q,ZOU M,et al.Simulation of traction ability of lunar rover with different mechanics of lunar soil[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(1):1-4.
[3] 丁亮亮,肖杰,宗魏,等.与沉陷相关联的星球车挂钩牵引力模型研究[J].农业机械学报,2014,45(12):37-42. DING L L,XIAO J,ZONG W,et al.Drawbar pull model of planetary rover associated with subsidence[J]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(12):37-42.
[4] 李建桥,黄晗,王颖,等.松软地面机器系统研究进展[J].农业机械学报,2015,46(5):306-320. LI J Q,HUANG H,WANG Y,et al.Development on research of soft-terrain machine systems[J].Transactions of the Chinese Society for Agricultural Machinery,2015,46(5):306-320.
[5] BEKKER M G.Introduction to Terrain-Vehicle Systems[M]. Ann Arbor:University of Michigan Press,1969.
[6] LYASKO M .Slip sinkage effect in soil-vehicle mecha- nics[J].Journal of Terramechanics,2010,47(1):21-31.
[7] SENATORE C,IAGNEMMA K.Analysis of stress distributions under lightweight wheeled vehicles[J]. Journal of Terramechanics,2014,51(1):1-17.
[8] 唐正义,吕振华,赵建新,等.月球车驱动轮在模拟月壤上的沉陷特性实验分析[J].航天器环境工程,2012,29(1):38-41. TANG Z Y,LV Z H,ZHAO J X,et al.Analysis of sinkage of rigid driving wheel rolling on simulant lunar soil [J].Spacecraft Environment Engineering,2012,29 (1):38-41.
[9] 石毅新,蒋蘋,卢向阳,等.高地隙田间管理底盘结构设计与试验[J].农业工程,2019,9(1):72-79. SHI Y X,JIANG P,LU X Y,et al.Design and experiment on chassis structure for highland gap field management[J].Agricultural Engineering,2019,9(1):72-79.
[10] 李泽,石毅新,蒋蘋,等.高地隙通用作业底盘的设计与试验[J].食品与机械,2018,34(2):100-105. LI Z,SHI Y X,JIANG P,et al.Design and experimental research of high clearance universal operation chassis[J].Food and Machinery,2018,34(2):100-105.
[11] 舒鑫,蒋蘋,胡文武,等.高地隙植保机底盘调平系统的设计与试验[J].湖南农业大学学报(自然科学版),2019,45(3):321-326. SHU X,JIANG P,HU W W,et al.Design and test of the chassis leveling system for the high ground gap plant protection machine[J].Journal of Hunan Agricultural University (Natural Sciences),2019,45(3):321-326.
[12] 丁亮,高海波,邓宗全,等.基于应力分布的月球车轮地相互作用地面力学模型[J].机械工程学报,2009,45(7):49-55. DING L,GAO H B,DENG Z Q,et al.Terramechanics model for wheel-terrain interaction of lunar rover based on stress distribution[J].Chinese Journal of Mechanical Engineering,2009,45(7):49-55.
[13] 江磊,刘兴杰,蒋云峰.月球车轮壤作用模型研究[J].车辆与动力技术,2013,31(1):1-6. JIANG L,LIU X J,JIANG Y F.Research on lunar rover wheel-soil interaction model[J].Vehicle and Power Technology,2013,31 (1):1-6.
[14] GAO H B,GUO J L,DING L,et al.Longitudinal skid model for wheels of planetary exploration rovers based on terramechanics[J].Journal of Terramechanics,2013,50(5):327-343.
[15] JAYAKUMAR P,MELANZ D,MACLENNAN J,et al. Scalability of classical terramechanics models for lightweight vehicle applications incorporating stochastic modeling and uncertainty propagation[J].Journal of Terramechanics,2014,54(4):37- 57.
[16] 刘一.基于水田土壤力学特性的车辆通过性研究[D].南京:南京农业大学,2014. LIU Y.Soil traffichability study based on mechanical properties of paddy soil[D].Nanjing:Nanjing Agricultural University,2014.
[17] GB/T 5667—2008农业机械生产试验方法[S].GB/T 5667—2008Test Methods for Agricultural Machi- nery production[S].
[18] 金大玮,李建桥,党兆龙,等.滑转条件下月球车轮沉陷模型研究[J].航空学报,2013,34 (5):1215-1221.JIN D W,LI J Q,DANG Z L,et al.Study on model for sinkage of lunar rover wheel under slip[J].Acta Aeronautica et Astronautica Sinica,2013,34(5):1215-1221.
Establishment and verification of the subsidence model for the high clearance chassis
LIN Wei1,2, SHI Yixin1*, JIANG Ping1, HU Wenwu1
(1.College of Mechanical and Electrical Engineering, Hunan Agricultural University, Changsha, Hunan 410128, China; 2.Yiyang Vocational Technical College, Yiyang, Hunan 413055, China)
Aiming at the problems of deep muddy feet and poor driving performance of working machinery in southern paddy fields, the subsidence characteristics of paddy field dynamic chassis wheels were studied through traction performance test with an example of high clearance chassis, whose ground clearance is 1 100-1 500 mm. Under the heavy load of 800-1 100 kg, the wheel load and slip rate were taken as test variables, and the wheel subsidence coefficient, driving coefficient and hook traction coefficient were taken as test indexes. The subsidence model of high ground clearance chassis is established. The results show that the hook traction coefficient of the wheel is directly proportional to the driving coefficient and inversely proportional to the subsidence coefficient, respectively. The field test was used to obtain the correction parameter of the model, which was positively correlated with the load and in the range of -0.3 to-0.19. It is lead to the error between the fitted value and the measured value in the field test is less than 5%.
high ground clearance chassis; traction performance; subsidence model; hook traction force
S219.3
A
1007-1032(2020)05-0623-06
林伟,石毅新,蒋蘋,胡文武.高地隙底盘沉陷模型的建立与验证[J].湖南农业大学学报(自然科学版),2020,46(5):623-628.
LIN W, SHI Y X, JIANG P, HU W W. Establishment and verification of the subsidence model for the high clearance chassis[J]. Journal of Hunan Agricultural University(Natural Sciences), 2020, 46(5): 623-628.
http://xb.hunau.edu.cn

2019-12-05
2020-08-11
科技部重点研发计划项目(2017YFD0700903-2);湖南省科学技术厅重点研发计划项目(2018NK2063、2019NK2141);湖南省教育厅项目(18C0166)
林伟(1995—),男,湖南邵阳人,硕士研究生,主要从事智能农业机械设计研究,1640127106@qq.com;*通信作者,石毅新,博士研究生,讲师,主要从事农业机械结构设计与开发研究,149703329@qq.com
责任编辑:罗慧敏
英文编辑:吴志立
