基于轨道六要素的SCKF滤波方法研究*
2020-11-11张国雪张军峰
黄 普,郭 璞,张国雪,张军峰
(1 宇航动力学国家重点实验室, 西安 710043; 2 西安卫星测控中心, 西安 710043)
0 引言
随着航天科技的发展,在轨卫星的应用越来越多,在导航、通信、气象等领域发挥着不可替代的作用,而轨道确定则是卫星应用的基础,特别是实时轨道确定,在卫星碰撞规避、陨落解体,机动变轨、精准打击发挥越来越重要的作用。而实时轨道确定问题本质上是滤波问题[1-6],考虑到实际应用中,状态方程和观测方程均为非线性,所以定轨问题也可称为非线性滤波问题。
非线性滤波问题在当前主要采用飞行器的位置速度形式,然而飞行器的空间定位还可以通过轨道六要素形式描述,这两种描述形式内在含义相同,但是存在较为复杂的非线性转换,会对滤波系统产生很大影响,必须对非线性滤波算法进行深入分析,选择合适的滤波器。非线性滤波器主要有扩展卡尔曼滤波器(extend kalman filter,EKF),无味卡尔曼滤波器(unsence kalman filter,UKF)和粒子滤波器(particle filter, PF)。粒子滤波运算量较大,实时性差,不适合实时应用;在同等计算量的前提下,UKF算法精度高于EKF算法,目前逐步成为主流算法,但UKF需要设置合理的采样点参数,才能得到理想的结果。文献[7]提出了基于Cubature变换的容积卡尔曼滤波(cubature Kalman filter,CKF),它采用一种等权值的容积点集来解决滤波的参数设置问题,为非线性滤波提供新思路。
文中从轨道六要素的估计出发,考虑到初始先验信息对滤波器的影响,采用基于轨道六要素的动力学模型,应用改进型——平方根容积卡尔曼滤波方法(square root cubature kalman filter,SRCKF)[8-9]。针对单测站的跟踪测量方式设计了不同的实时轨道确定方法,并对几种方法进行仿真试验,结果表明该算法在轨道六要素的估计上具有更高的稳定性和精度,适合工程应用。
1 轨道六要素状态模型
假设初始时刻卫星轨道六要素已知,摄动力分解为径向分量fr,横向分量ft和轨道面法向分量fh,则系统动学模型为:

(1)
式中:r=a(1-ecosE),p=a(1-e2),E是偏近点角,可通过平近点角计算。
轨道六要素状态模型与传统的位置速度状态模型相比,在摄动因素较多的情况下,方程右函数均为复杂函数。但在同一精度要求下,采用轨道六要素的形式可以选择较大积分步长,对测量信息的频率要求不高。如果取相同步长,基于轨道六要素的方式局部截断误差明显减少,模型精度提高。所以,在摄动加速度复杂的情况下,仅考虑一步预测,选择轨道六要素的形式,会提高计算效率。
(2)
由观测方程可以看出,用轨道六要素从几何上不能直接描述观测量[10],只能通过位置速度与轨道六要素转换间接表示。
2 平方根CKF滤波器设计
动力学方程(1)和测量方程(2)能写成如式(3)形式:
xk+1=f(xk,wk),zk=h(xk,vk)
(3)

1)计算容积点
(4)

2)非线性传播采样点
(5)
3)计算状态预测
(6)

4)计算估计预测误差协方差矩阵的平方根
(7)
5)计算容积点
(8)
6)计算非线性传递观测信息容积点
Zj,k+1|k=h(Xj,k+1|k)
(9)
7)计算量测预测
(10)
8)计算新息协方差矩阵的平方根
(11)

9)计算协方差矩阵
(12)
10)计算滤波增益
(13)
11)更新状态估计
(14)
12)计算状态估计误差协方差的平方根
(15)
3 实验与应用
为了验证该算法的性能和精度,本节根据仿真实测数据,分析比较了传统的基于位置速度的平方根UKF卡尔曼滤波方法和基于轨道六要素的平方根UKF滤波方法的差异。设在轨航天器的初始轨道六要素为:积日:23 212,积秒:52 351.000,半长轴a=22 087 961.693 m,偏心率e=0.892 4,倾角i=29.445 5°,升交点赤经o=27.601 8°,近地点辐角w=357.836 2°,平近点角m=8.384 4°。在实际应用中,不可能测得精确的目标航天器运动状态初值,即滤波初值与实际状态会有偏差,因此,滤波初值在仿真初始轨道上增加偏差,基于位置速度的状态模型增加偏差如下:
初始状态方差为:
P=diag{(10 000,10 000,10 000,10,10,10)}
基于轨道六要素的状态模型增加偏差如下:

初始状态方差为:
P=diag{(30 000,0.01,0.02,0.02,0.02,0.02)}
采用单套USB雷达设备跟踪了飞行过程,设备的数据频率为1 s,测距噪声为20 m,测角噪声为0.005°。在轨航天器理论三维弹道如图1,测站跟踪俯仰角变化如图2。采用两种滤波方法对同一目标进行跟踪测量。为清楚表达两种方法滤波效果,可通过轨道半长轴及倾角变化曲线比较,如图3~图6。
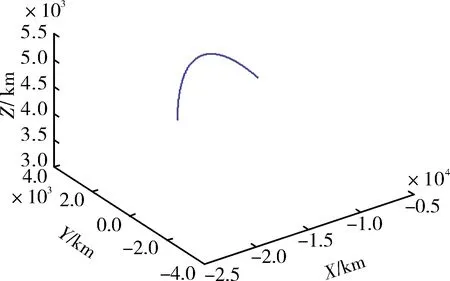
图1 在轨航天器跟踪弧段

图2 俯仰角变化图
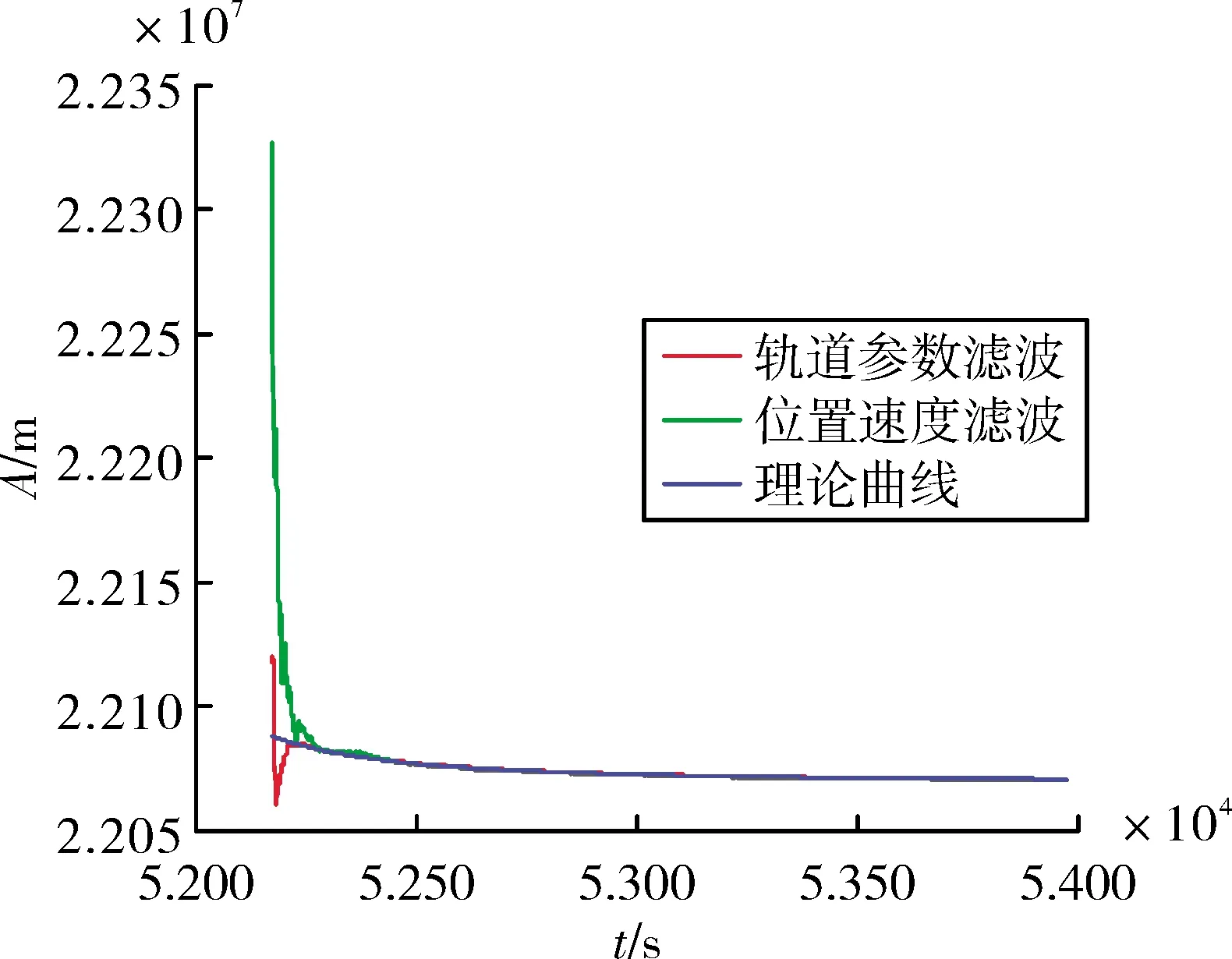
图3 半长轴变化图
由图3~图6的仿真结果可以看出,使用基于轨道六要素的滤波方法精度高于位置速度方法,从收敛性角速度看,两种算法在初始状态偏差的情况下,均能快速收敛,但基于轨道六要素的平方根CKF滤波方法收敛更加快速,输出更加稳定。从滤波性能来说,由于时间主要花费在状态方程积分计算上,采用位置速度描述方式滤波需要146 s,而采用平方根CKF滤波方法仅需112 s,文中方法也能提高计算效率。
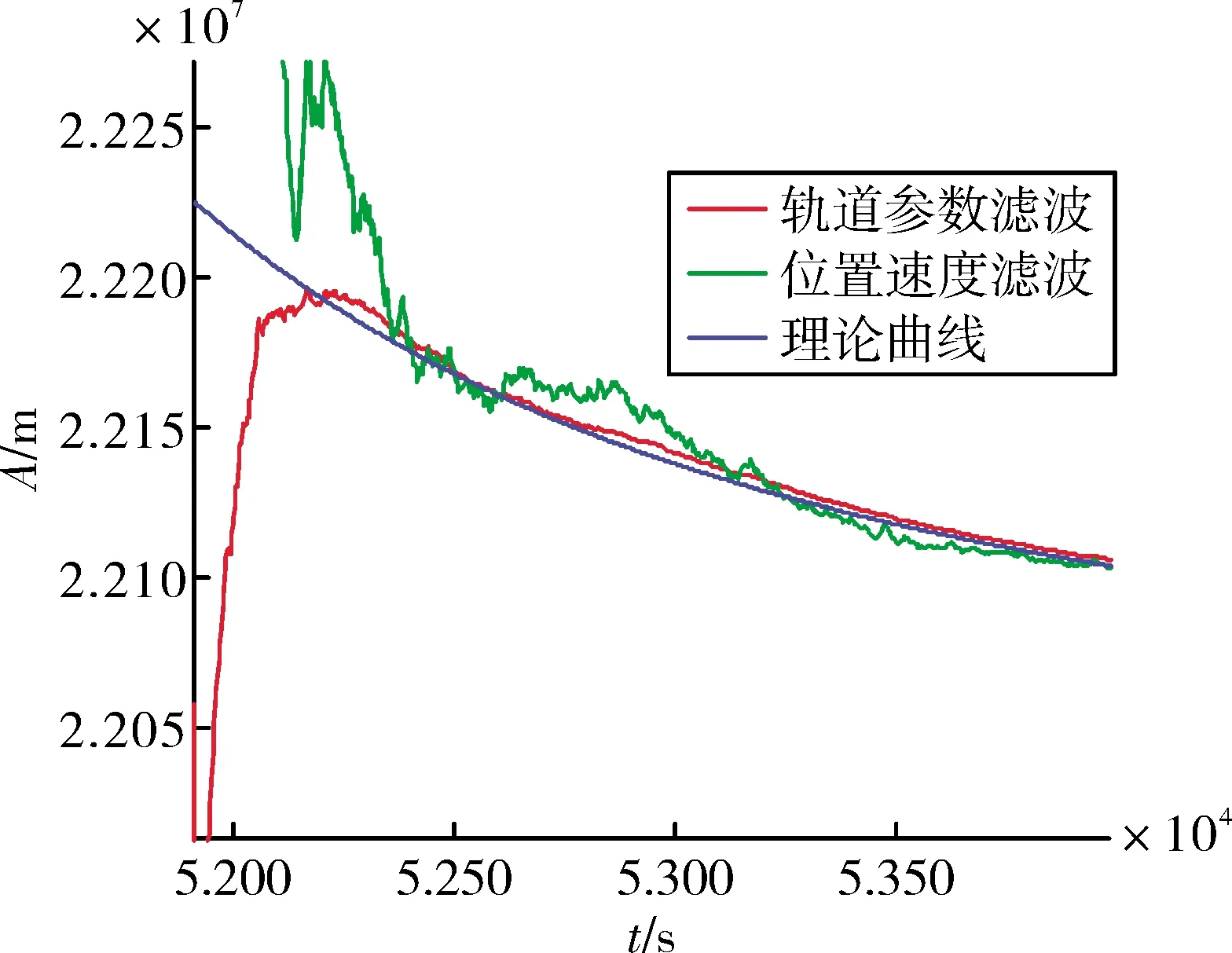
图4 半长轴局部放大变化图

图5 倾角变化图
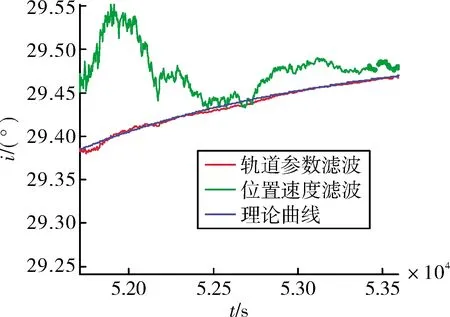
图6 轨道倾角局部放大变化曲线
4 结论
文中分析了具有先验信息的情况下,采用轨道六要素描述方式对实时定轨的影响,考虑到滤波过程中可能出现协方差阵的非正定性,应用改进容积卡尔曼滤波方法——平方根容积卡尔曼滤波方法,针对单测站的跟踪测量,通过基于轨道六要素和位置速度两种实时轨道确定方法,验证算法的有效性,结果表明基于轨道六要素的滤波算法在具有先验信息的估计上具有更高的稳定性和精度,适合工程应用。
