海翼水下滑翔机温盐深剖面仪盐度修正
2020-11-06褚福硕庞重光司宗尚俞建成
褚福硕, 庞重光, 司宗尚, 俞建成
海翼水下滑翔机温盐深剖面仪盐度修正
褚福硕1, 2, 3, 庞重光1, 2, 4, 5, 司宗尚1, 2, 4, 5, 俞建成6
(1.中国科学院海洋研究所, 山东 青岛 266071; 2. 中国科学院海洋环流与波动重点实验室, 山东 青岛 266071; 3. 中国科学院大学, 北京 100049; 4. 青岛海洋科学与技术试点国家实验室海洋动力过程与气候功能实验室, 山东 青岛 266237; 5. 中国科学院海洋大科学研究中心, 山东 青岛 266071; 6. 中国科学院沈阳自动化研究所, 辽宁 沈阳 110016)
通过均值过滤及Morison热滞后校正公式对存在温度误差的原始盐度进行修正。经过均值滤波后盐度尖峰现象消失, 在温跃层由于热滞后导致的条状盐度抖动现象减小, 上下行剖面盐度误差从0.013减小到0.004, 总体修正盐度修正率提高3.05倍。结果表明利用该分段修正方法修正水下滑翔机搭载温盐深剖面仪(CTD)存在的盐度“尖峰”及热滞后误差效果显著。
水下滑翔机; 盐度修正; 热滞后效应; 温盐深剖面仪
水下滑翔机(autonomous underwater glider)是一种新型浮力驱动、锯齿轨迹水下观测平台, 近年来受到国内外极大的关注, 其通过改变浮力及姿态调整可以实现垂直及水平滑行[1-2]。其集成生物、化学、物理传感器可收集海洋基础水文要素如温度、盐度、溶解氧、悬浮物、有害藻类等, 并通过全球定位系统(GPS)等其他远程控制将数据传输到基站。相比船载温盐深剖面仪(CTD), 其可以在水中数周或数月连续收集海洋空间数据[3-4]。自20世纪初, 在美国海军研究处支持下, 逐渐发展出3种可操作水下滑翔机: (1) 华盛顿大学Sea-glider号[5]; (2) 韦伯公司Slocum号[6]; (3) 斯克利普斯研究所Spray号[7], 并逐步应用在如美国西海岸, 墨西哥湾流, 地中海等世界各大洋中[2, 4]。国内水下滑翔机起步较晚, 2003年, 中国科学院沈阳自动化研究所开展水下滑翔机基础研究工作, 并成功研发出海翼水下滑翔机[8], 此外, 天津大学、华中科技大学、浙江大学、中国海洋大学等也相继开展了水下滑翔机的研究工作。
CTD是一种常用获得水下温度、深度、盐度数据的仪器, 其中盐度数据需要通过测得温度、电导率利用状态方程得到。为了得到精确盐度数据, 需要对温度传感器及电导率传感器响应时间不匹配进行修正, 由于温度传感器及电导率传感器响应时间不同, 导致产生盐度‘尖峰’现象, 其时间量级约O(100), 对于这种盐度误差国内外已有广泛研究[9-10]。随着泵式CTD的普及以及制造技术的发展, 通过控制流过电导率传感器元件的流速以及温度传感器和电导率传感器放置位置, 盐度尖峰显著减小; 同时, 另一种盐度误差现象逐渐引起关注。所有的电导率元件都可以储存热量, 当CTD在上升或下放过程中穿过温度梯度变化较大的深度时, 尤其在温跃层, 储存在电导率传感器中的热量扩散到周围海水中, 从而影响到下次测量的电导率, 导致水下滑翔机测量上行盐度与下行盐度不一致, 这种热滞后现象量级约为O(101)。Lueck[11]首次将热滞后现象通过模型模拟, 并成功利用修正系数、对热滞后效应修正, Morison等[12]基于温盐剖面通过减少CTD下行与上行盐度误差并改进先前计算方程, 使得修正不依赖电导率元件敏感常数从而大大提高修正效率。针对泵式CTD, Mensah等[13]重新评估修正系数, 通过对弱盐度梯度深度的修正, 使得过度修正效果显著减小。
不同于常规船载CTD的测量方式, 根据浮力调整水下滑翔机垂直下降速度缓慢(0.2~0.5 m/s)并易受到表层海流影响, 导致收集的数据在空间和时间上的不均匀。受限于电池容量, 水下滑翔机采样频率较低(0.01~0.5 Hz), 甚至采用间断采样, 同时根据采样计划, 部分CTD仍采用无泵式, 从而给盐度修正造成更大困难。针对此情况, Garau等[14]根据无泵式CTD速度重新评估修正系数, 并通过matlab二次规划模型计算下行与上行盐度面积的最小值使盐度修正取得了较好的结果。Liu等[15]成功地利用此方法修正了水下滑翔机穿过强温跃层的盐度数据。
中国科学院沈阳自动化研究所近年来在南海等海域开展了一系列水下航行实验, 成功获取了大量温盐资料。海翼号水下滑行机装载泵式CTD, 潜行深度1 000 m, 为节约电量, 样本频率采用0.167 Hz (6 s),远低于海鸟公司建议精度(0.5 Hz), 这种低精度的时间样本使得水下滑翔机盐度数据质量控制需要重新评估[16]。
1 资料和方法
2016年7月3—16日期间, 中国科学院海洋研究所、中国科学院沈阳自动化研究所以及中国海洋大学联合组织, 利用海翼号水下滑翔机通过搭载多传感器, 实现了对涡旋的连续跟踪观测。2016年7月3日, 涡心位置位于(11.372°E, 17.431°N)。此次航行共获得了81个温盐剖面数据, 本文将对此温盐数据进行修正。为抑制温度传感器和电导率传感器响应时间不匹配产生的盐度尖峰现象, 采用均值滤波, 所有剖面盐度值都通过中心窗轻微修正, 中心窗中点的值按此窗口的中值代替, 利用这种分别方法对温度、盐度、电导率进行修正。针对热滞后效应, Morison利用两个修正系数: 表面异常温度持续时间(1/)和异常温度强度评估电导率修正关系:
T() = –T(–1) +(() –(–1)), (1)
= 4f–1(1 + f–1)–1, (2)
= 1 – 2–1, (3)
其中为样本指数,f为Nyquist频率。测量温度减去异常温度T得到电导率元件内部真实温度, 利用此温度与测量电导率根据状态方程得到真实盐度。修正系数、由经验公式给出:
这里需要注意的是, 公式(4)、(5)是基于常规传统CTD并假定流过电导率元件速度为常数获得, 对无泵水下滑翔机CTD修正效果并不理想。根据海水状态方程, 盐度的精确获得需要上行和下行获得的温度在时间及空间上保持一致, 由于水下滑翔机观测采样精度及长时间水下作业, 导致测得上行温度及下行温度存在误差[14-15, 17], 从而利用一般方法修正热滞后现象效果不理想。
基于上述存在温度误差情况, 根据公式(1), 电导率内部真实温度的获得依赖修正系数、, 为评估更准确的修正系数, 本文在基于水下滑翔机下行与上行温盐剖面一致的假定下, 采用枚举法, 通过递归修正寻找下行与上行剖面盐度偏差最小的修正系数、, 并将该组系数代入公式(1), 从而获得修正后的温度, 之后利用状态方程获得盐度, 从而修正热滞后影响。同时由于温度误差对盐度修正在不同深度处的影响差异, 将每组盐度剖面分成0~40, 41~80, 81~140, 141~300, 301~1 000 dbar共5段并分别修正, 利用此种方法修正针对存在明显温度误差的盐度数据结果较好[18]。
2 结果分析
2.1 单组剖面
利用上述方法, 从81组剖面中选择1组代表性剖面, 该剖面于2016年7月12日第2次下潜获得, 其存在一定温度误差(图1a), 并且由热滞后效应导致上行及下行盐度误差现象明显。经过均值滤波处理, 盐度尖峰显著减小(图1c), 将得到的盐度每隔1dbar内插一个数据并计算下行剖面与上行剖面盐度误差记为MSE(平均盐度误差), 并记为修正前MSE与修正后MSE 比值,越大, 修正结果越好。利用分段修正, 分别对41~80(I), 81~140(II), 141~300 dbar(III)进行修正(图2)。经过修正盐度误差显著减小, 在I层由于水下滑翔机下潜速度最大, 样本稀疏修正结果较好,为3.12(图2a); 在II层由于盐度梯度小, 盐度误差对温度误差不敏感, 热滞后效应最明显, 修正效果最好,为8.22(图2b); 在III层由于较大的温度误差, 修正结果一般,为2.14, 这种较大的温度误差会导致141~190 dbar盐度过度修正现象(图2c)。图3表明整个剖面在经过分段修正后, 在温跃层出现的热滞后影响减小, 单组剖面分段修正上下剖面盐度误差从0.016 提高到0.006, 总体修正前后盐度比提高2.67倍。
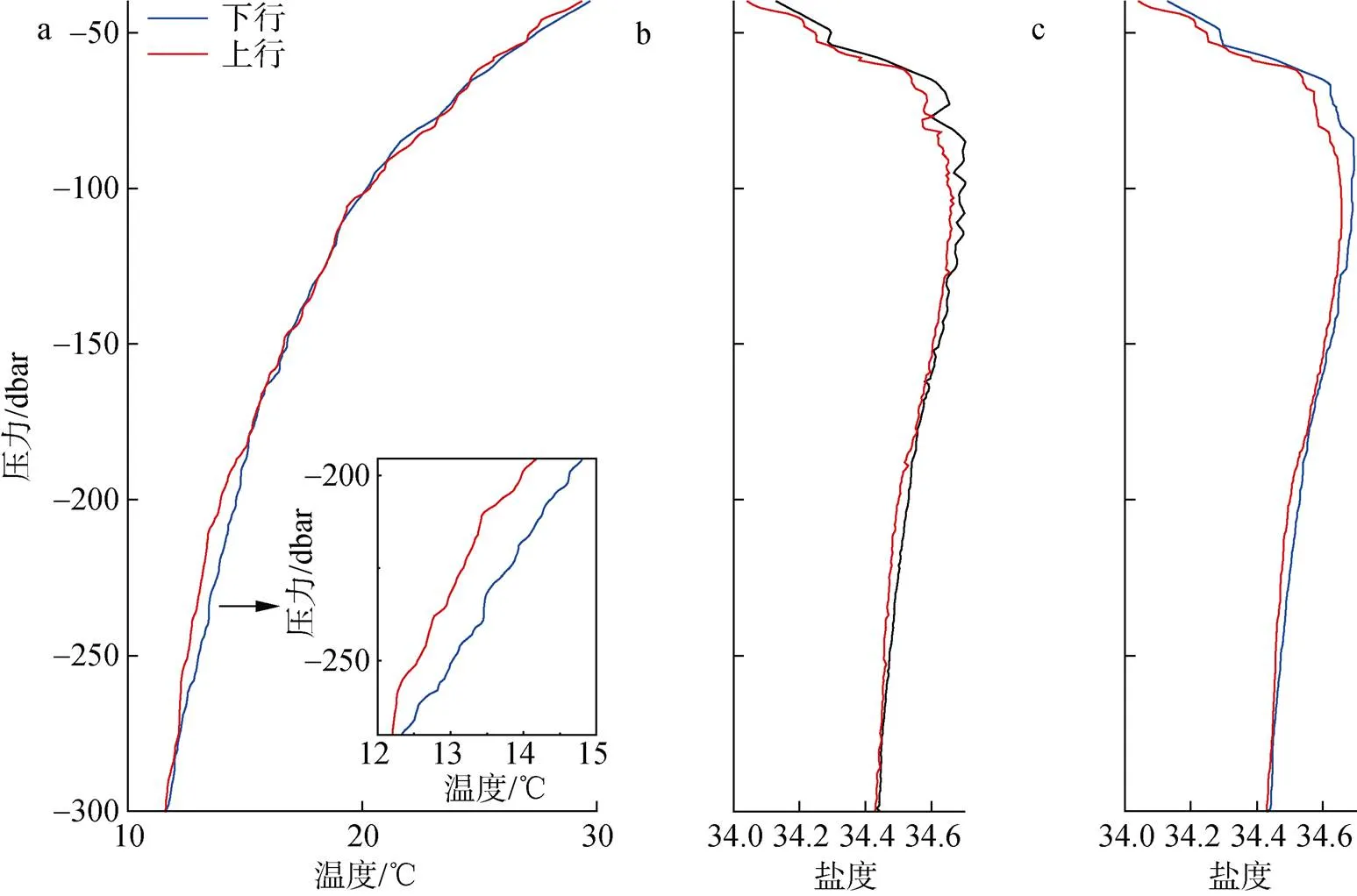
图1 7月12日第二次下行与上行温度(a)、未修正盐度(b)和均值滤波修正盐度(c)
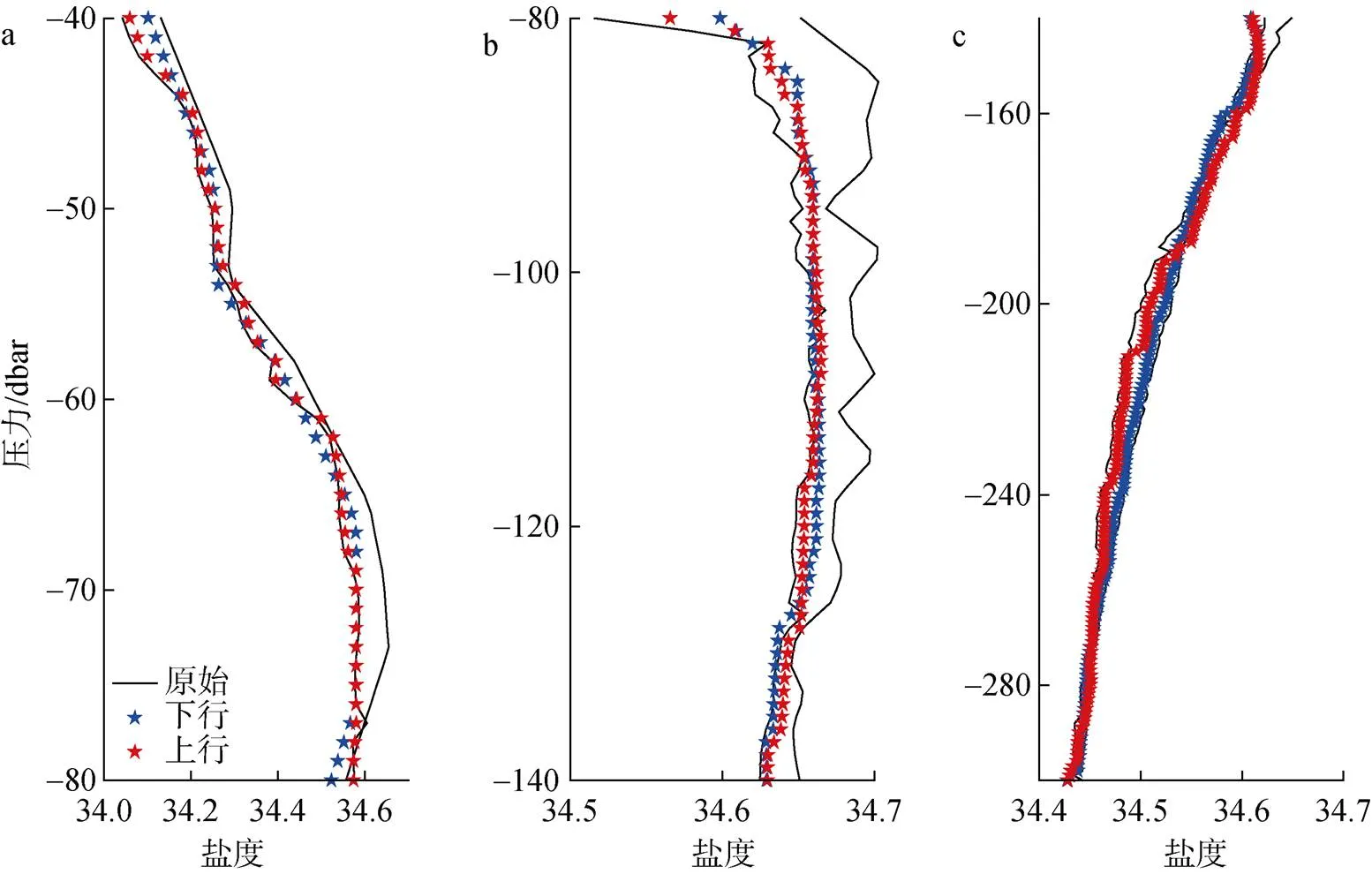
图2 均值滤波修正盐度(a)与下行热滞后修正盐度和上行热滞后修正盐度
2.2 81组剖面修正
利用上述分段修正方法针对81组剖面上下行盐度修正, 图4表明在未修正前水下滑翔机在温跃层获得的盐度数据存在条状抖动, 在经过均值过滤及热滞后修正后这种抖动显著减小, 上下盐度误差从0.013 提高到0.004, 整体盐度修正比提高3.05倍(图5), 修正后仍存在的锯齿状盐度误差可能是由于温度传感器和电导率传感器未对压力传感器响应时间对齐及高频信号如内波造成[12]。
3 结论
水下滑翔机正成为海洋多平台观测系统的重要组成部分, 对其收集的数据进行质量控制及修正(如热滞后)至关重要。利用水下滑翔机CTD获得的盐度存在误差, 尤其以温跃层的热滞后效应最为显著。泵式水下滑翔机通过提升采样频率可以减小盐度误差, 但根据采样计划和电池容量, 低频率GPCTD (0.1~0.5 Hz)仍然应用在世界各大洋中。本文对低采样频率, 存在温度误差的海翼水下滑翔机数据进行修正。利用均值滤波消除温度传感器和电导率传感器响应时间不同引起的盐度尖峰现象; 根据盐度误差对温度误差的不同响应, 将盐度数据分为I层(41~80 dbar)、II层(81~140 dbar)、III层(141~300 dbar), 结合Morison方程通过枚举法寻找使上行盐度剖面与下行盐度剖面误差最小的修正系数α和β的组合, 并利用该组系数修正盐度。结果显示修正后盐度误差显著减小, II层修正结果最好, 而在I层和III层修正结果稍差, 这可能是由于在盐度梯度较大的地方(I层和III层), 温度误差会导致盐度出现较大偏差, 在盐度梯度小的地方(II层), 盐度误差对温度误差不敏感, 导致热滞后效应最为明显。修正后的盐度仍存在锯齿状, 一方面可能由于压力传感器与温度传感器及电导率传感器的未对齐引起的, 另一方面可能是由于内波扰动造成的, 这需要未来进一步的研究。
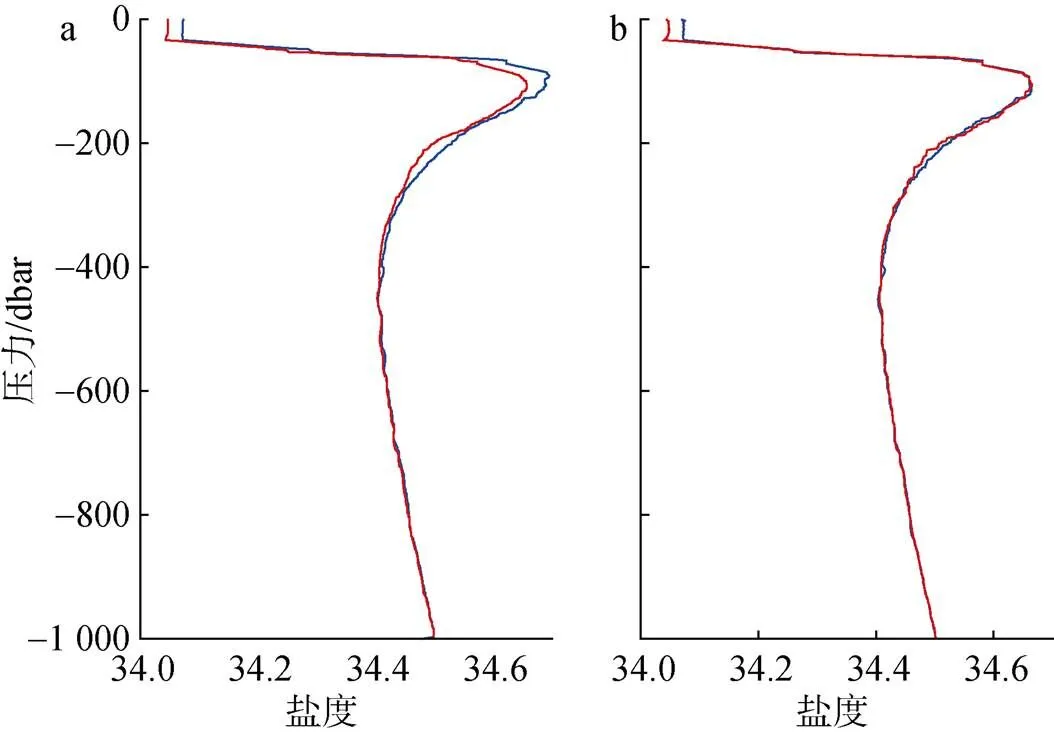
图3 原始盐度(a)和分段热滞后修正盐度(b)
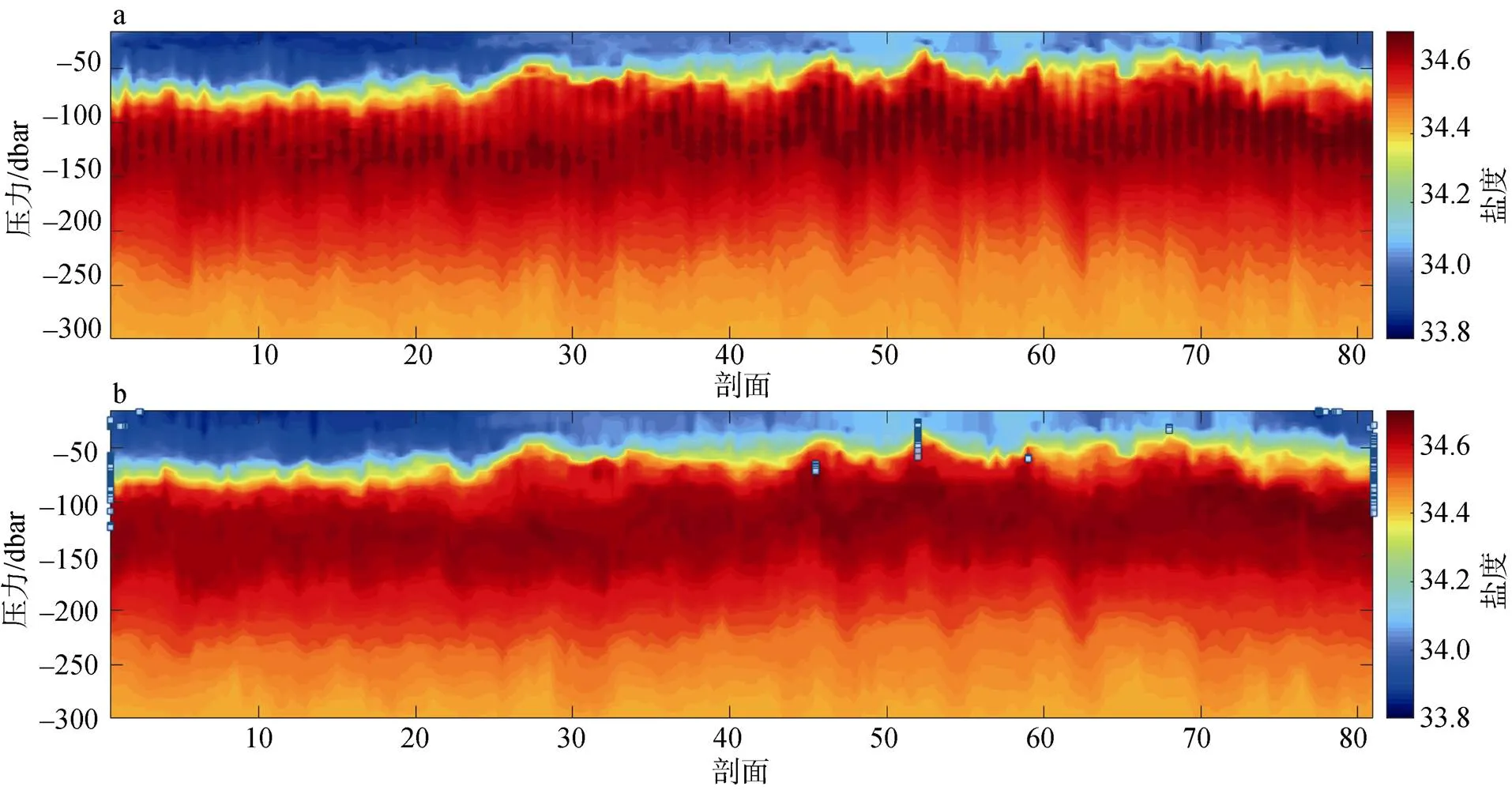
图4 原始盐度(a)与修正后盐度(b)剖面
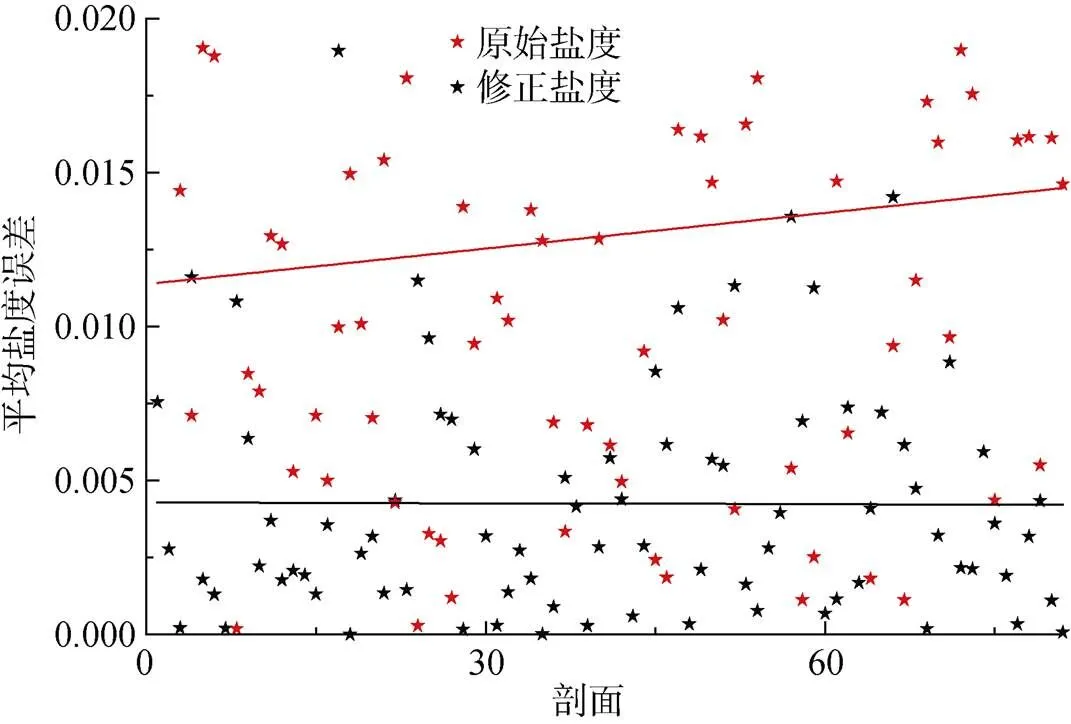
图5 原始盐度误差与修正后盐度误差
尽管通过减少CTD防水涂层以及采用新型材料制作的CTD正逐渐变成可能[19], 但通过盐度修正技术提高获得的实时盐度数据质量仍是水下滑翔机CTD盐度数据质量控制不可或缺的一步, 这种修正技术还可适用于未来其他CTD中, 如Mammal CTD[20], UCTD[9]。
[1] 庞重光, 连喜虎, 俞建成. 水下滑翔机的海洋应用[J]. 海洋科学, 2014, 38(4): 96-100.Pang Chongguang, Lian Xihu, Yu Jiancheng. Ocean application of the underwater glider[J]. Marine Sciences, 2014, 38(4): 96-100.
[2] Meyer D. Glider technology for ocean observations: A review[J]. Ocean Science Discussions, 2016, 88(3): 1-26.
[3] Rudnick D L, Davis R E, Eriksen C C. Underwater gliders for ocean research[J]. Marine Technology Society Journal, 2004, 38(2): 73-84.
[4] Rudnick D L. Ocean research enabled by underwater gliders[J]. Annual Review of Marine Science, 2016, 8(8): 519.
[5] Eriksen C C, Osse T J, Light R D. Seaglider: A long-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436.
[6] Webb D C, Simonetti R E. Slocum: An underwater glider propelled by environmental energy[J]. Journal of Ocean Eng, 2001, 26(4): 447-452.
[7] Sherman J, Davis R E, Owens W B. The autonomous underwater glider “Spray”[J].Journal of Oceanic Engineering, 2001, 26(4): 437-446.
[8] Yu JC, Zhang A Q, Jin W M. Development and experiments of the sea-wing underwater glider[J]. China Ocean Engineering, 2011, 25(4): 721-736.
[9] Ullman D S, Hebert D. Processing of underway CTD data[J]. Journal of Atmospheric & Oceanic Technology, 2014, 31(4): 984-998.
[10] Giles A B, Mcdougall T J. Two methods for the reduction of salinity spiking of CTDs[J]. Deep Sea Research Part A Oceanographic Research Papers, 1986, 33(9): 1253-1274.
[11] Lueck R G. Thermal inertia of conductivity cells: Theory[J]. Journal of Atmospheric & Oceanic Technology, 1990, 7(5): 741-755.
[12] Morison J, Andersen R, Larson N. The correction for thermal-lag effects in Sea-Bird CTD data[J]. Journal of Atmospheric & Oceanic Technology, 1994, 11(11): 1151-1164.
[13] Mensah V, Menn M L, Morel Y. Thermal mass correction for the evaluation of salinity[J]. Journal of Atmospheric & Oceanic Technology, 2007, 26(3): 665.
[14] Garau B, Ruiz S, Zhang W G. Thermal lag correction on slocum CTD glider data[J]. Journal of Atmospheric and Oceanic Technology, 2011, 28(9): 1065-1071.
[15] Liu Y, Weisberg R H, Lembke C. Coastal Ocean Observing Systems[M]. Boston: Academic Press, 2015: 305-325.
[16] Johnson G C, Toole J M, Larson N G. Sensor corrections for Sea-Bird SBE-41cp and SBE-41 CTDs[J]. Journal of Atmospheric & Oceanic Technology, 2007, 24(6): 1117-1130.
[17] Janzen C D. Improving ctd data from gliders by optimizing sample rate and flow past sensors[J]. Journal of Oceanic Engineering, 2001, 126(2): 245-256.
[18] Chu F, Si Z, Pang C. Thermal lag correction from a glider payload CTD for poor temperature data[J]. Pure and Applied Geophysics, 2020, 177: 3039-3051.
[19] Mantua N J, Hare S R. The Pacific decadal oscillation[J]. Journal of Oceanography, 2002, 58(1): 35-44.
[20] Mensah V, Roquet F, Siegelman-Charbit L. A correction for the thermal mass induced-errors of CTD tags mounted on marine mammals[J]. Journal of Atmospheric & Oceanic Technology, 2018, 26(3): 665.
Salinity correction for sea-wing glider payload conductance-temperature-depth
CHU Fu-shuo1, 2, 3, PANG Chong-guang1, 2, 4, 5, SI Zong-shang1, 2, 4, 5, YU Jian-cheng6
(1. Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; 2. CAS Key Laboratory of Ocean Circulation and Waves, Chinese Academy of Sciences, Qingdao 266071, China; 3. University of Chinese Academy of Sciences, Beijing 100049, China; 4. Laboratory for Ocean Dynamics and Climate, Pilot National Laboratory for Marine Science and Technology (Qingdao), Qingdao 266237, China; 5. Center for Ocean Mega-Science, Chinese Academy of Science, Qingdao 266071, China; 6. Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China)
In this study, the formulae used to correct the mean filter and Morison thermal-lag errors were used to separately correct the salinity spikes and salinity thermal-lag errors in sea-wing glider payload conductance-temperature-depth (GPCTD). After correction, the thermal-lag shakes in thermocline are significantly reduced and the ratio of salinity correction is improved by 3.06 times. The results indicate that the sectional correction method is effective to correct the “peak” of salinity and thermal-lag error of GPCTD.
underwater glider; salinity correction; thermal lag effect; glider payload conductance-temperature-depth
Jul. 24, 2019
P756
A
1000-3096(2020)10-0101-06
10.11759/hykx20190724001
2019-07-24;
2019-08-20
国家自然科学基金(41576060); 国家科技攻关计划(2016YFC301203)
[National Natural Science Foundation of China, No.41576060; National Key R&D Program of China, No. 2016YFC301203]
褚福硕(1995-), 男, 江苏徐州人, 硕士, 主要从事近海环流的研究, E-mail: chufushuo17@mails.ucas.ac.cn; 庞重光,通信作者, 博士生导师, 研究员, 研究方向为近海沉积动力学, E-mail: chgpang@qdio.ac.cn
(本文编辑: 刘珊珊)