汽车高速行驶时自动紧急转向避撞的前馈与反馈跟踪控制的研究*
2020-11-04来飞,叶心
来 飞,叶 心
(重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆 400054)
前言
随着人们对汽车安全要求的不断提高,智能汽车及其控制领域已逐渐成为研究热点。汽车高级驾驶辅助系统(advanced driving assistance system,ADAS)作为实现自动驾驶汽车的重要技术支撑,在紧急工况下向驾驶员提供预警,并在即将发生碰撞等危险工况下采取全自动制动或转向操作。自动紧急制动系统(automatic emergency braking,AEB)可减轻车辆碰撞的受损程度,甚至在某些工况下可完全避免发生碰撞。我国也出台了营运车辆相应的标准法规[1]。
但在某些场景中,面对突然出现的障碍物,即使紧急制动也无法避免事故发生。此时进行转向操作则有可能避免事故。因此,自动紧急转向控制是解决避撞问题的另一有效措施,然而至今为止,通过转向控制来实现避撞的市场产品依然较少。部分研究人员在此方面开展了相关研究工作[2-7]。Alleyne[2]通过简单的车辆线性2自由度动力学模型,结合最优控制方法比较了5种避撞方式的效果,即前轮转向、四轮转向、四轮制动转向、前轮制动转向和后轮制动转向;Bevan等[3]则研究车辆平面转向运动学,以圆弧过渡的避撞路径为参考轨迹,结合制动与转向控制方法,使车辆能自动通过较为严格的ISO双移线法规测试;Schorn[4]通过S函数路径规划,对有制动干预与无制动干预的避撞跟踪控制进行了对比研究;Yuan等[5]利用模型预测控制方法,对主动前轮转向和独立车轮转矩控制的高速避撞效果进行了仿真研究;王其东等[6]利用3自由度车辆动力学模型,基于有限元路径分割和动态预测路径跟踪算法,对车辆紧急避撞过程中的纵向与侧向力分配规律进行了研究;Gao等[7]采用改进的哈密顿算法,通过上层质点模型进行运动规划,下层采用非线性3自由度动力学模型进行最优控制分配。上述研究中采用的大多数车辆模型都过于简化,不能真实反映实际车辆的跟踪性能,另外也未考虑车辆在避撞过程中的外界干扰,如侧向风等。
针对上述问题,本文中首先通过建立车辆质点模型,对车辆转向避撞与制动避撞的有效性进行了对比分析,在此基础上构建了自动转向避撞的前馈与反馈控制系统总体框架,选取过渡较为缓和的七次多项式规划路径,在前馈控制器的设计中利用较简单的2自由度车辆转向动力学模型,在反馈控制器的设计中则利用鲁棒性较强的PID控制算法。最后,在控制算法的验证上,选取车辆转向与悬架统一动力学模型,进行了有侧向风干扰的车辆避撞仿真,表明所提出的控制算法合理可行。
1 转向避撞与制动避撞的有效性对比分析
为评估与对比转向避撞和制动避撞的效果,建立车辆避撞质点模型并进行分析,如图1所示。其中,车辆坐标系为xoy,地面坐标系为XOY,汽车在XOY坐标系下的运动方程为
式中:m为整车质量;φ为车辆航向角;Fx和Fy分别为车辆坐标系下轮胎作用在车辆质心处沿x和y方向的合外力。
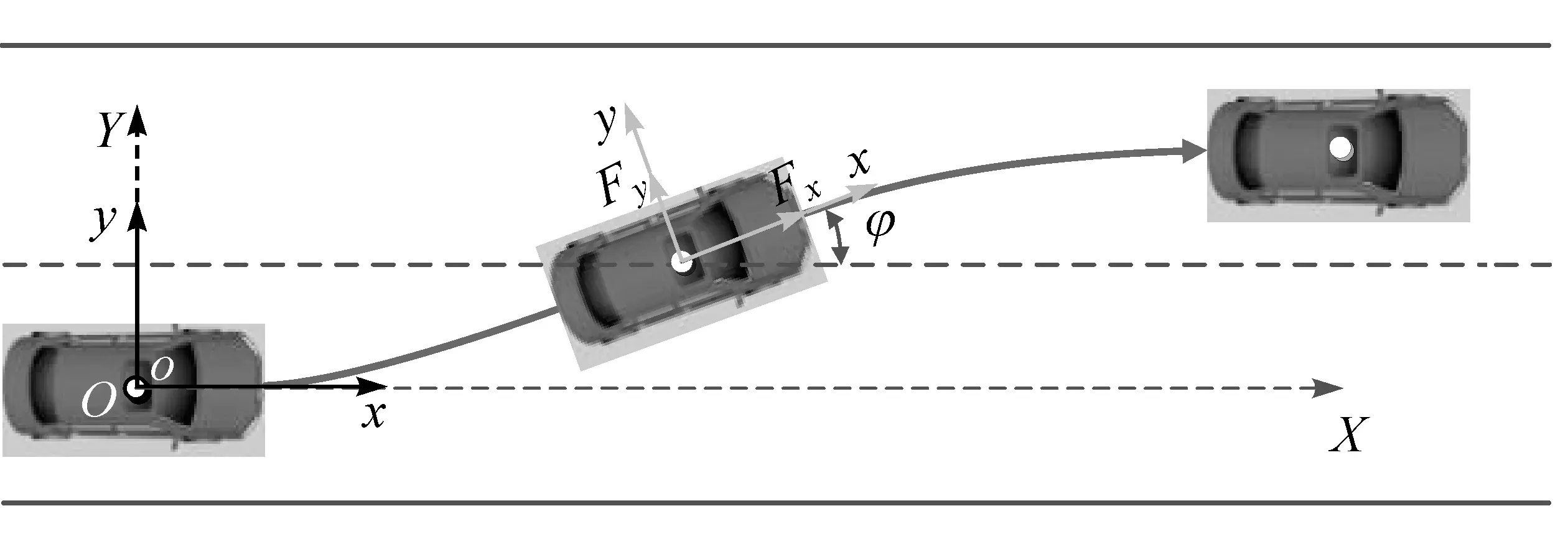
图1 车辆避撞质点模型
由轮胎物理特性和牛顿第二定律可得
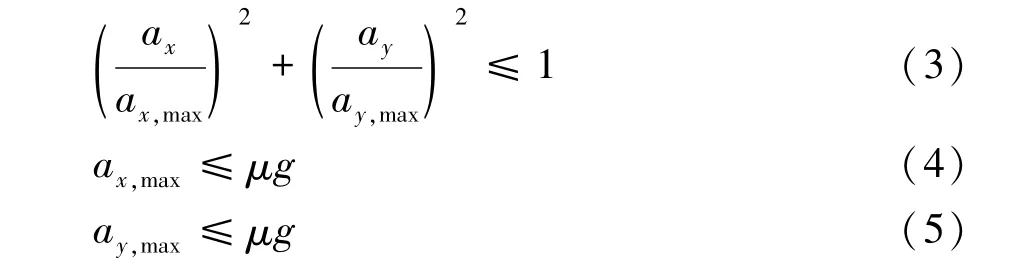
式中:ax、ay分别为车辆的纵向和侧向加速度;ax,max、ay,max分别为车辆的纵向最大加速度和侧向最大加速度;μ为路面附着系数;g为重力加速度。
引入状态变量ζ=[X,Y,υX,υY],系统输入u=[Fx,Fy],则车辆避撞运动的状态方程可写为
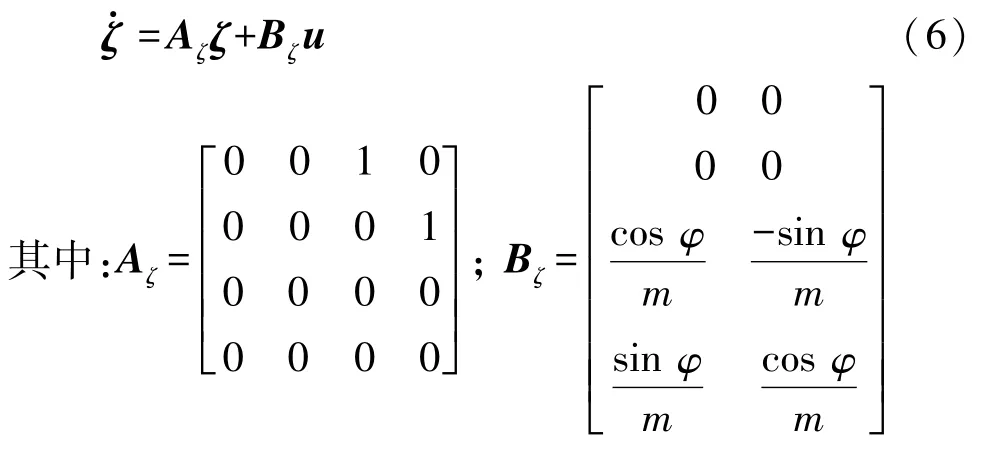
假定车辆避撞前的初始状态为X(0)=X0,Y(0)=Y0,vX(0)=vX0,vY(0)=vY0,避撞结束时刻t的状态为X(t)=Xt,Y(t)=Yt,vX(t)=vXt,vY(t)=vYt。设系统初始时刻状态为[0,0,vx,0],以使车辆所需的纵向避撞距离最小,即求出系统输入u使Xt最小。
考虑通过3种不同的操纵方式来完成避撞操作,即制动避撞、转向避撞、制动+转向联合避撞。则系统输入和约束条件(即车辆t时刻的状态约束)如表1所示,其中a为车辆避撞所需侧向距离。
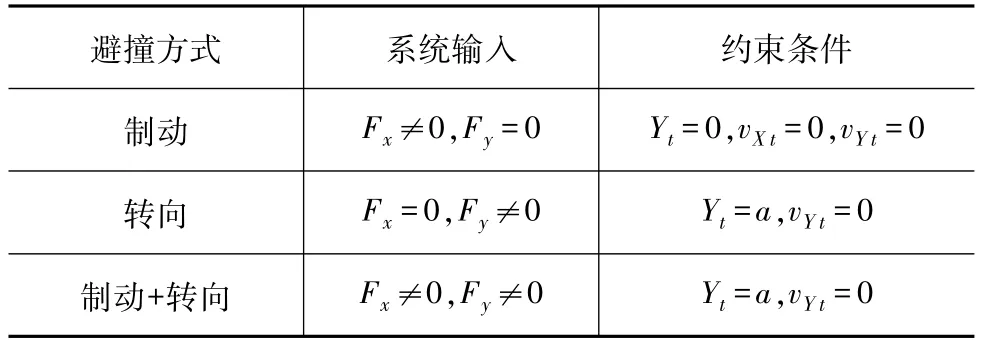
表1 不同避撞方式下的系统输入和约束条件
采用Matlab中的优化工具fminbnd,对不同车速下的3种避撞方式分别求解。不同路面附着系数的计算结果如图2和图3所示。可以看出,当车辆在高速情况下(本文中特指车速大于等于80 km/h)紧急避撞时,通过转向避撞所需的纵向距离要比通过制动避撞所需的纵向距离小,车速越高、路面附着系数越小,优势越明显。而制动与转向联合避撞要比通过转向避撞所需的纵向距离稍小,在低附着路面上的结果较接近。因此,当汽车在高速紧急避撞时,通过转向操纵进行避撞的综合性能更优,同时也与实际情况较吻合,故下面主要针对转向避撞进行研究。
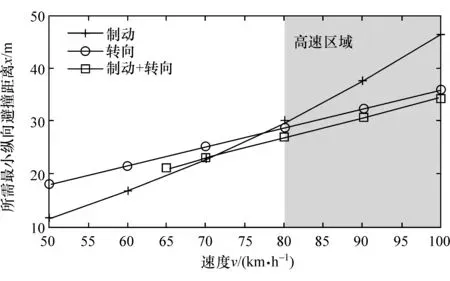
图2 最小纵向避撞距离(μ=0.85,a=3.5 m)
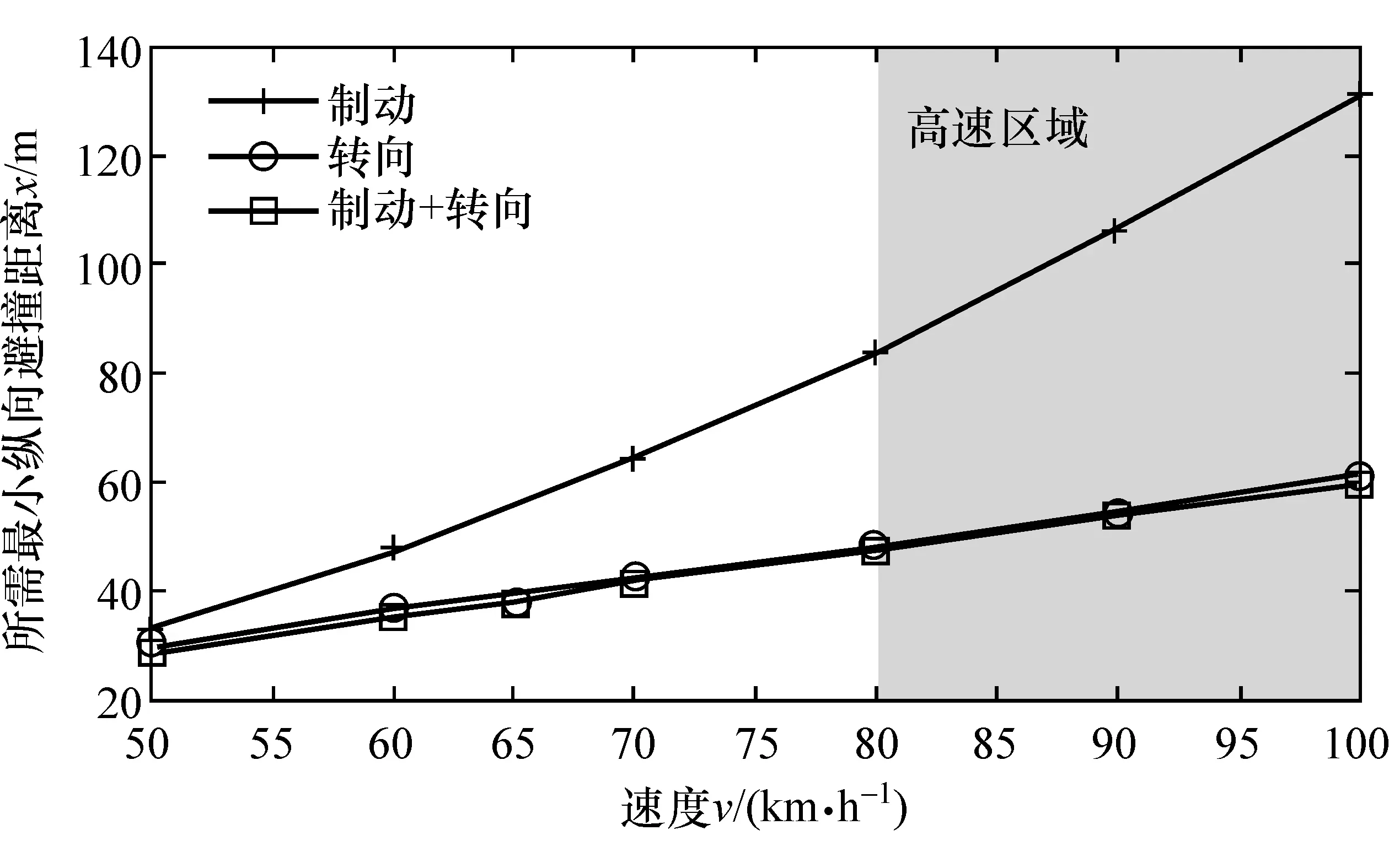
图3 最小纵向避撞距离(μ=0.3,a=3.5 m)
2 转向避撞系统总体框架与参考路径规划
为安全精确地完成转向避撞操作,应保证车辆实施紧急转向时通过的轨迹能够有效避开障碍物。因此,首先需要对转向避撞轨迹进行规划,其次还需对车辆进行控制,从而使其能够准确跟踪所规划的参考轨迹。自动紧急转向避撞系统总体框架见图4。采用前馈与反馈相结合的跟踪控制策略,通过车辆实际响应及其与预先设定的参考轨迹侧向位移之间的偏差进行控制,使车辆能够有效避撞。值得注意的是,在车辆实际响应计算中,选取的车辆模型与真实情况越接近,实际应用时的跟踪效果越好,但同时计算量也会越大,控制器设计的难度也会更大。
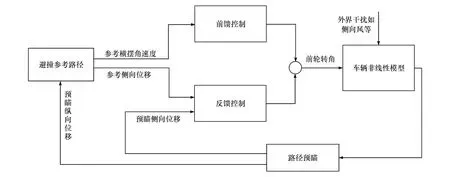
图4 自动紧急转向避撞系统总体框架
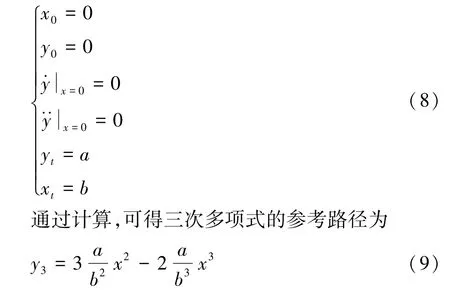
在车辆转向避撞参考路径的设计过程中,假定车辆在采取转向避撞之前按直线行驶且车速保持不变,车辆初始侧向速度、纵向加速度、纵向位移和侧向位移均为0,前方障碍物为静止状态。转向避撞参考路径常见的有三次多项式规划和五次多项式规划策略[8]。
三次多项式参考路径的表达式为

式中:x为车辆的纵向位移;ydes为车辆的理想侧向位移;ci为拟合系数(后续类似)。
设车辆的初始坐标为(x0,y0),避撞后的终点坐标为(xt,yt)。在路径的起点,因为车辆的运动状态为匀速直线行驶,故车辆此时的横向位移y0=0,横向车速=0,横向加速度=0。避撞结束时车辆的横向位移yt=a,纵向移动距离xt=b。可得该参考轨迹的约束条件为
在五次多项式参考路径中,可进一步考虑车辆避撞结束时刻的侧向速度和侧向加速度约束条件,其表达式为
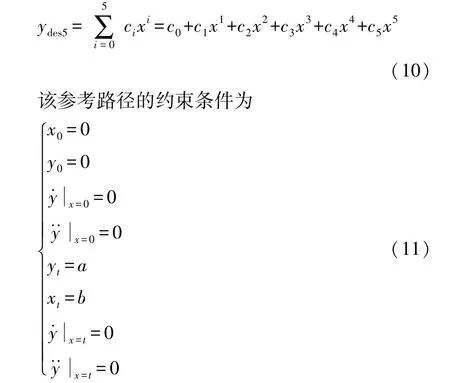
通过计算,可得五次多项式的参考路径为

同理,在转向避撞参考路径的约束条件中,可进一步考虑车辆初始时刻和结束时刻的侧向加速度变化率,从而进行七次多项式参考路径的规划。假定其表达式为
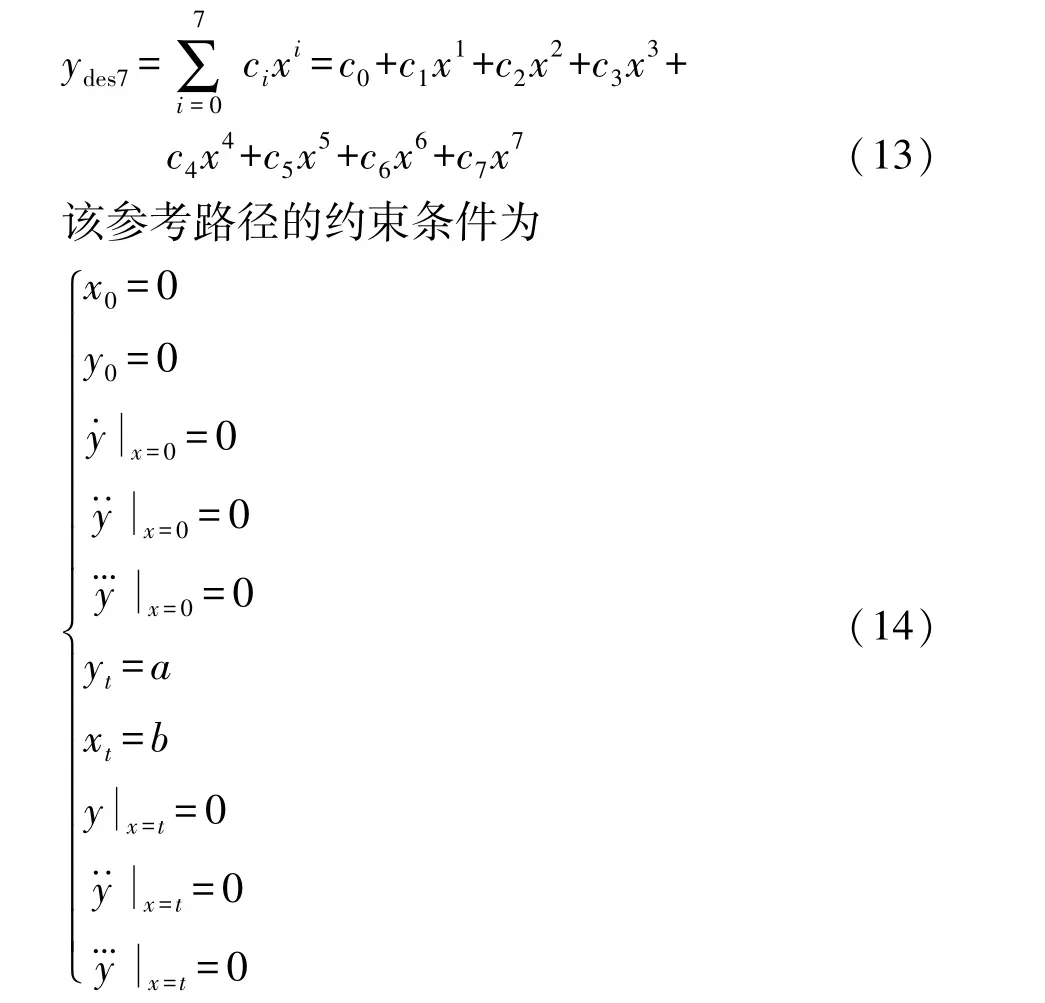
通过计算求解,最终可得七次多项式的参考路径为

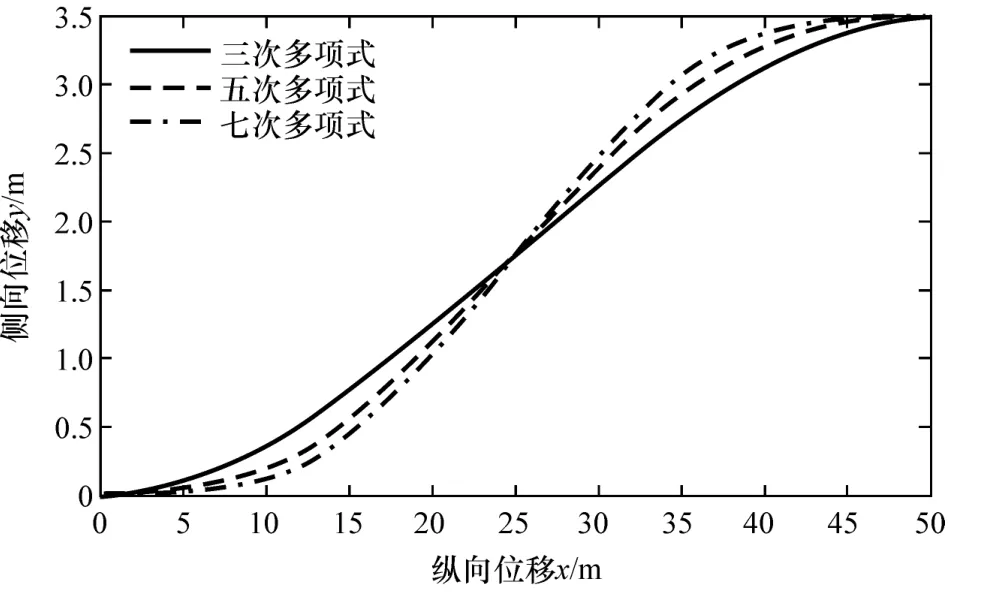
图5 不同多项式参考路径对比
在车辆纵向速度为80 km/h,前方障碍物纵向距离b为50 m,车辆侧向偏移a为3.5 m的约束条件下,对比三次多项式、五次多项式和七次多项式规划下的侧向位移如图5所示。对比五次与七次多项式下的参考横摆角速度和横摆角加速度,如图6和图7所示。由图可见,相比三次多项式和五次多项式,七次多项式的参考路径由于考虑了开始时刻和结束时刻的侧向加速度变化率,其避撞过程会更加缓和。图8为采用七次多项式路径规划的情况下,以不同车速进行转向避撞时,车辆侧向参考位移随时间的变化曲线。
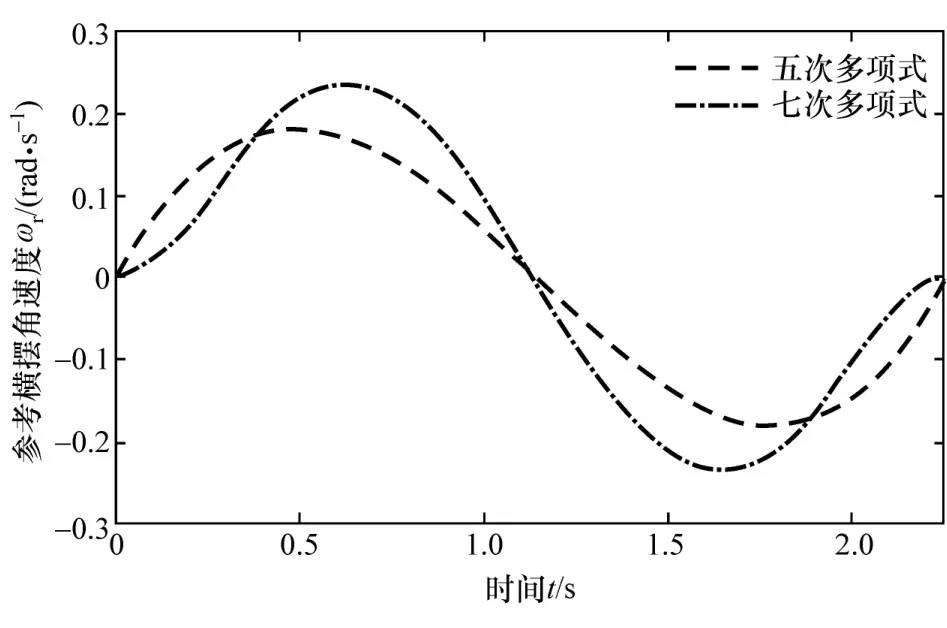
图6 参考横摆角速度对比
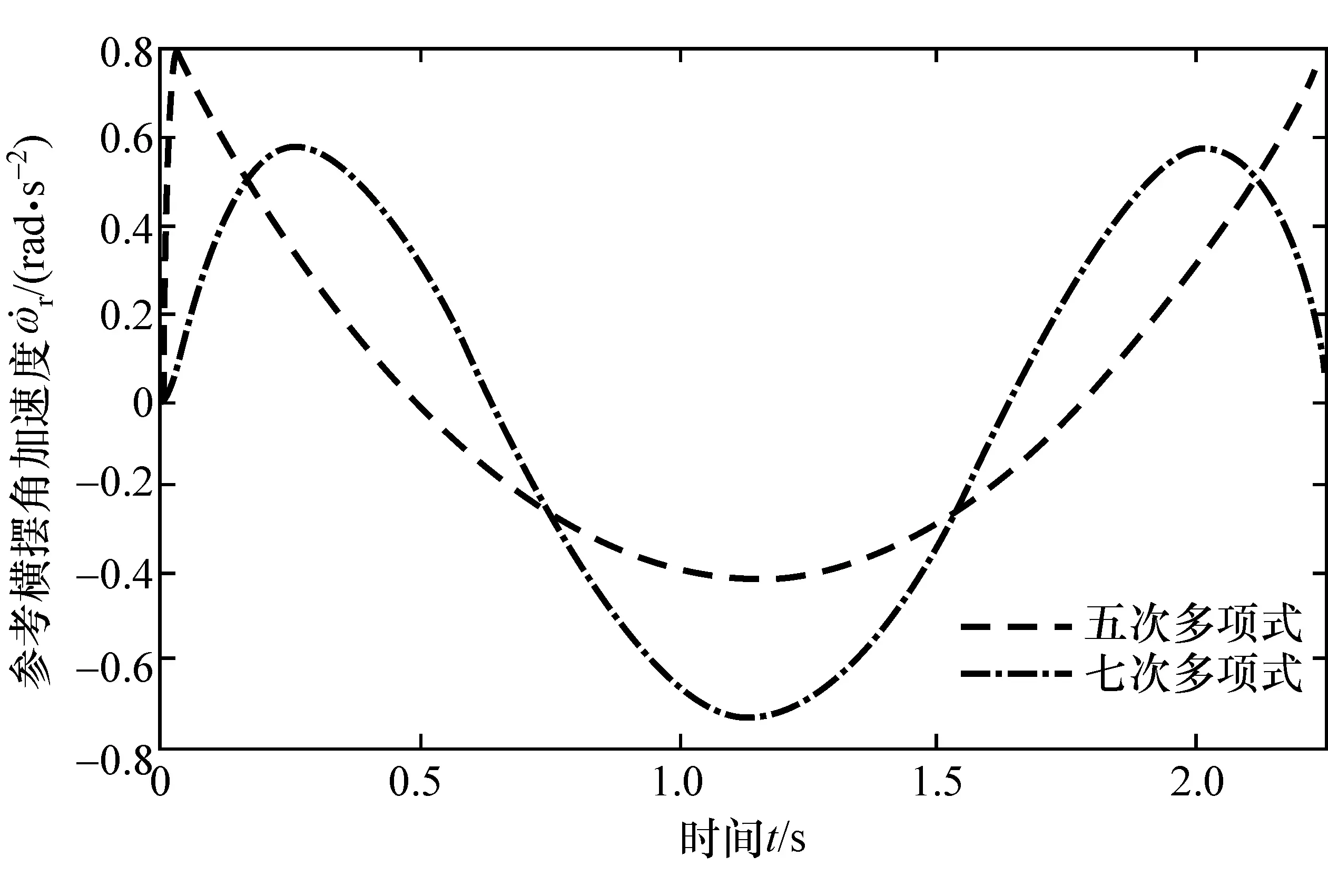
图7 参考横摆角加速度对比
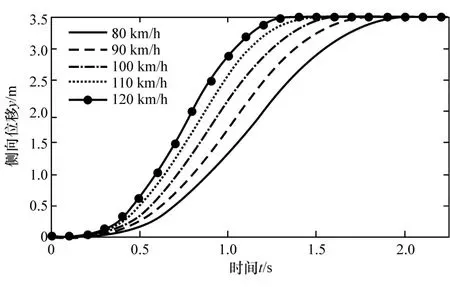
图8 以不同车速在七次多项式路径规划下的车辆侧向参考位移
3 前馈与反馈跟踪控制
车辆转向避撞过程可分成两个操纵阶段,即车道变换和车道保持。本文中在车辆轨迹跟踪控制的设计上相应地包括两个部分:前馈控制和反馈控制。其中,前馈控制主要用于车辆在换道过程中的轨迹跟踪,同时缩短车辆跟踪预定路径的反应时间。理论上讲,只要前馈模型足够准确,前馈得出的前轮转角施加给车辆的响应与参考轨迹应该没有差异。但实际上,任何车辆模型都不可能绝对精确。此外,在车辆行驶过程中不可避免地出现其它扰动情况,如侧向风干扰,因此,还须对转向系统进行额外的反馈控制。反馈控制一方面用来修正因扰动、噪声和参数不确定性引起的误差,另一方面则用来保证车辆在换道后的轨迹保持,确保路径跟踪的精确性。
前馈控制所需的转向盘转角可通过预先获得的参考路径和车辆模型计算得出。由于实际车辆的转向传递特性非常复杂,而且非线性因素难以用于前馈控制器的设计,因此,在前馈控制器的设计上对车辆的转向传递特性采用了较为简单的线性2自由度转向动力学模型[9],即

式中:ωr为跟踪参考路径的横摆角速度;i为转向盘角传动比;v为车速;L为轴距;δFF为所需的前馈车轮转角;K为车辆稳定性因数。
在输出反馈控制器的设计中,车辆相对道路的侧向位置通常以车辆某一前部位置(预瞄点)为基准[10]。若假定方向角误差e2很小,则弦长可近似等于弧长,车辆参考路径yref相对实际行驶路径yp的侧向偏差ey可通过当前时刻侧向位移偏差e1、预瞄距离ds和方向角误差e2计算得出。同时,由于PID控制算法简单,有较好的鲁棒性和可靠性,因此采用PID控制算法实现车辆侧向位移的反馈跟踪控制。通过多次反复试算,最终确定PID控制器参数值,即KP取10,KI取0,KD取30。

式中δFB为所需的反馈车轮转角。
综合前馈控制与反馈控制,本文所提出的车辆转向避撞控制策略的总转向盘转角输入值为

此外,进一步考虑机械转向系统的局限性,确保所规划的参考路径合理可行,对转向盘转角及其变化率进行了如下约束:

4 算例分析
4.1 车辆模型
在前文中采用简化的车辆质点模型分析了转向避撞和制动避撞的有效性,为进一步研究车辆在转向避撞过程中的实际响应,还应对车辆底盘动力学进行详细建模研究。同时,高速车辆转向避撞往往表现出较强的非线性特性,传统2自由度线性模型难以满足要求。本文中所使用的车辆模型为转向和悬架系统相统一的动力学模型,具体建模过程参见文献[11]。车辆模型主要参数见表2。其中,ms为簧上质量,muij为簧下质量(i=1,2表示前、后,j=l,r表示左、右,下同),Ixx为簧上质量绕车辆坐标系x轴的等效转动惯量,Iyy为簧上质量绕车辆坐标系y轴的等效转动惯量,Izz为整车绕车辆坐标系z轴的等效转动惯量,l1、l2为整车质心至前、后轴距离,ksij为单侧悬架系统等效的垂向刚度,csij为单侧悬架系统垂向阻尼,ktij为单侧轮胎垂直刚度,h为侧倾力臂,d为轮距。
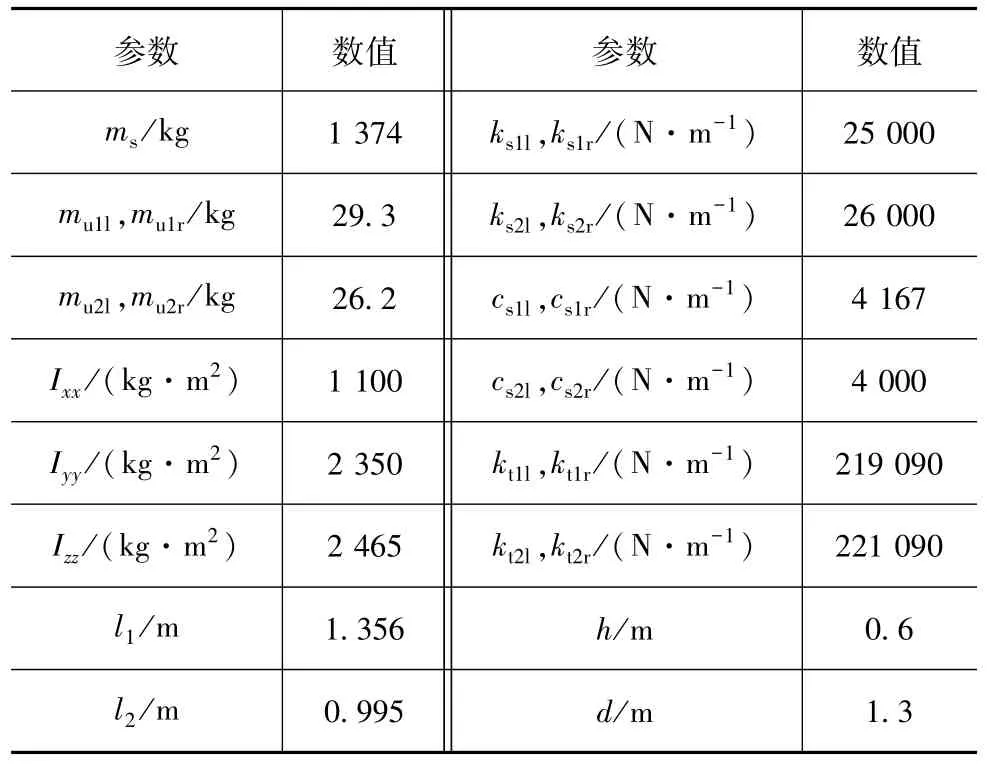
表2 车辆参数
轮胎模型采用魔术公式轮胎[12],其表达式为

式中:Y(x)代表纵向力、侧向力和回正力矩;B为刚度因子;C为形状因子;D为峰值因子;E为曲率因子;ΔSv为曲线的垂直方向漂移。
图9为前轮胎名义侧向力与名义纵向力的关系曲线。
4.2 避撞场景构建与仿真分析
假定车辆以80 km/h车速行驶,在t=0时刻车辆前方50 m处出现某一静止障碍物,车辆须进行换道操作,换道后车辆保持直线行驶。在t=3 s时刻出现侧向风干扰,侧向风幅值为2 000 N。在t=3.75 s时刻侧向风消失。行驶至t=4.5 s时刻发现前方50 m处又出现另一静止障碍物,车辆须再次进行换道操作,换道后车辆继续保持直线行驶。避撞场景示意如图10所示。
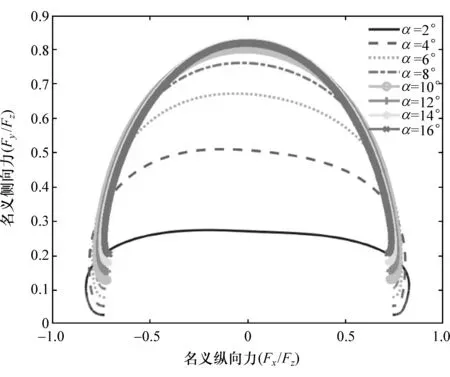
图9 不同车轮侧偏角下轮胎名义侧向力与名义纵向力的关系曲线
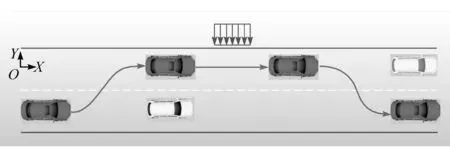
图10 车辆避撞场景示意
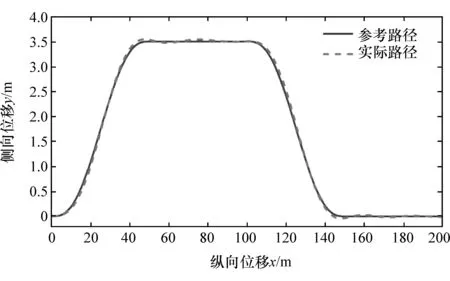
图11 车辆侧向-纵向位移
采用七次多项式拟合的参考路径,结合前馈+反馈的跟踪控制策略,车辆自动紧急转向避撞的响应情况如图11~图15所示。其中,图11和图12为车辆侧向位移和侧向位移跟踪误差的响应情况。可以看出,受控车辆实际行驶轨迹与参考路径基本吻合,侧向位移跟踪误差最大为0.02 m,表明所提出的控制算法具有较好的鲁棒性和及时性,能很好地跟踪预先给定的参考路径,并通过转向实现有效避撞的目的。
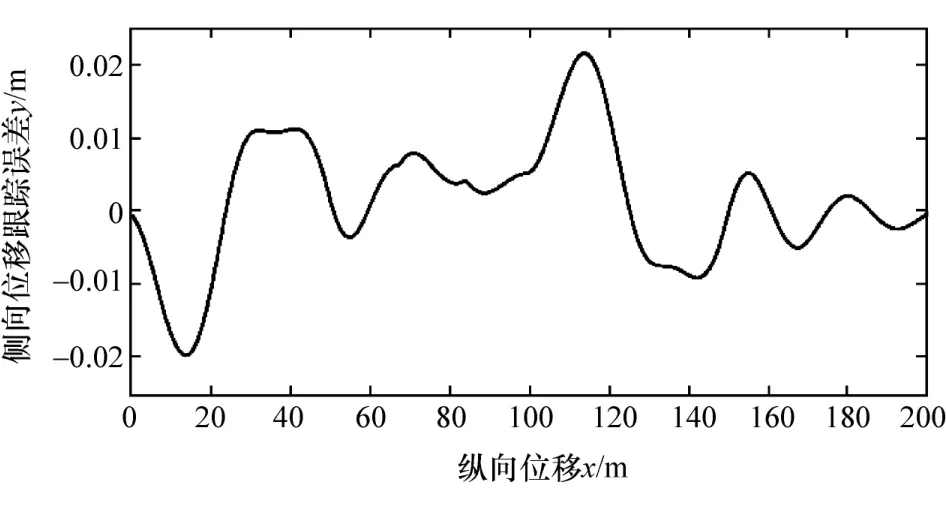
图12 车辆侧向位移跟踪误差
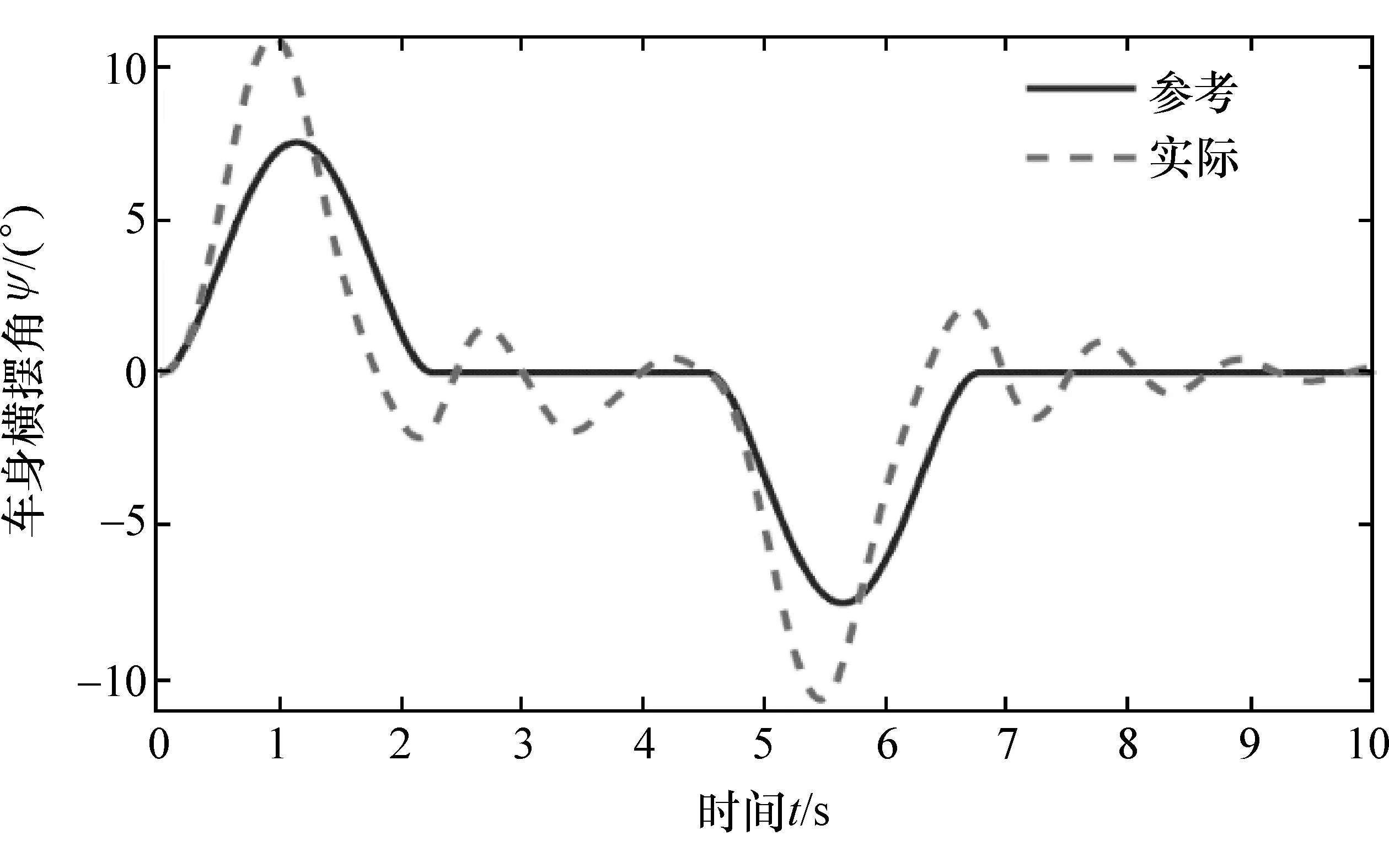
图13 车辆横摆角
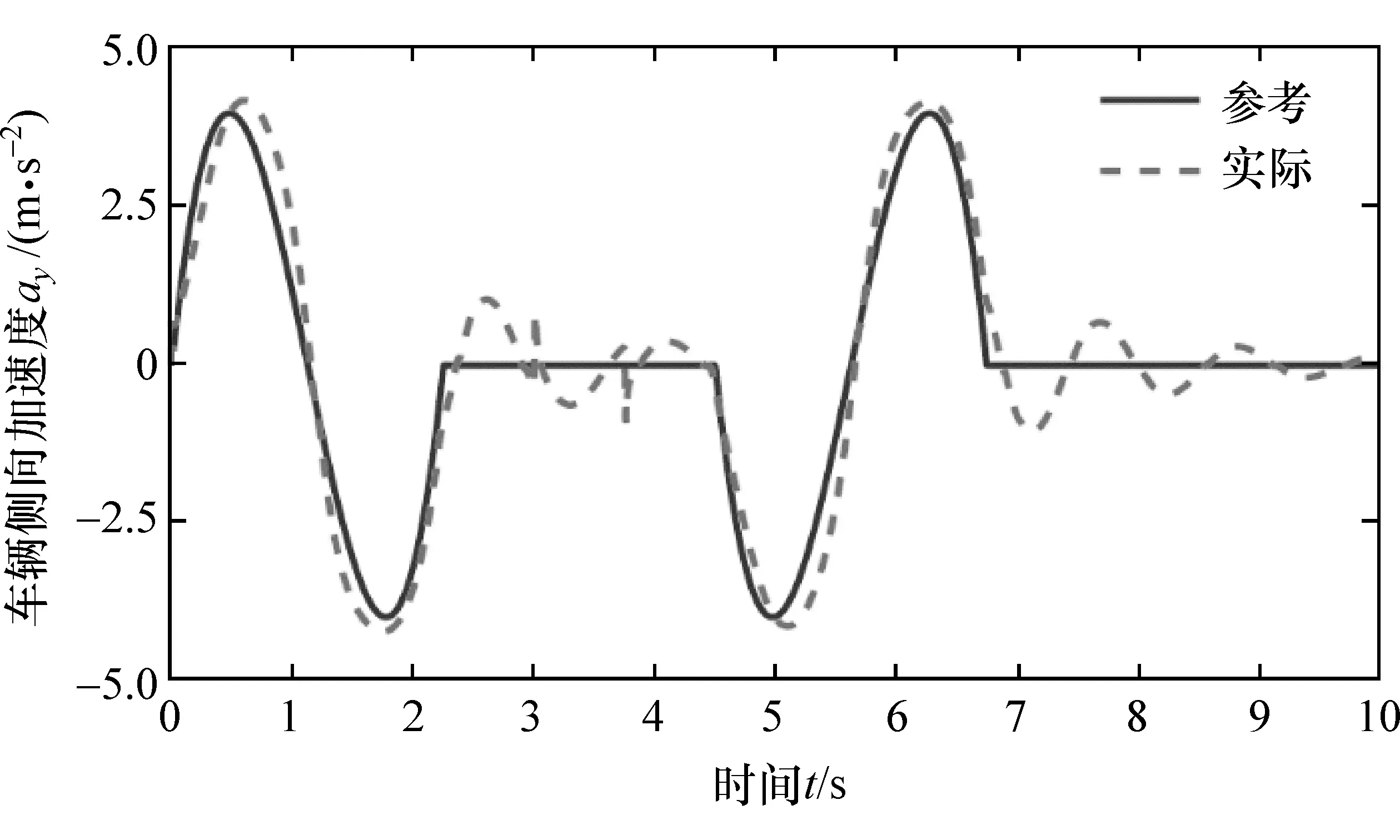
图14 车辆侧向加速度
从图13也可看出,实际车辆的横摆角响应与参考横摆角的趋势基本吻合,与参考横摆角相比,车辆的实际横摆角峰值相对偏大,并出现一定程度的波动,这是因为本文中所跟踪的车辆系统为转向与悬架相统一的非线性车辆模型,车辆系统响应具有一定程度的延时性和瞬态特性。另外,从图14可看出,实际车辆的侧向加速度与参考侧向加速度也基本吻合,由于受侧向风干扰影响,实际车辆在t=3 s和t=3.75 s时刻的侧向加速度受到一定的冲击。图15为实际车辆车身侧倾角响应。可以看出,车辆在转向避撞过程中,车身侧倾角也会出现一定程度的波动。
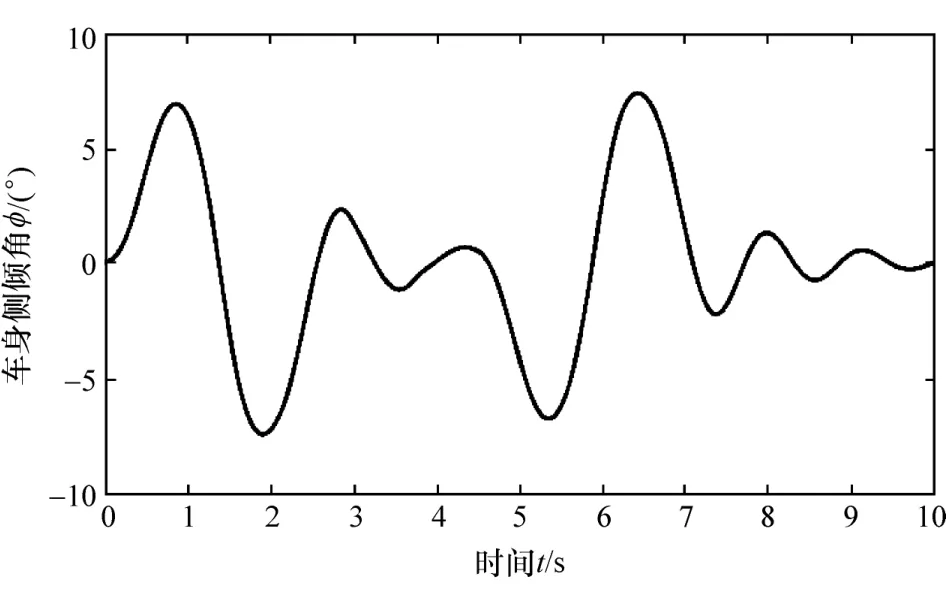
图15 车身侧倾角
5 结论
通过建立汽车避撞质点模型,对比分析了制动避撞、转向避撞和制动与转向联合避撞对车辆最小纵向距离的要求。结果表明,与制动避撞相比,转向避撞对纵向距离的要求显著减小,车速越高、路面附着系数越小,效果越明显,与制动和转向联合避撞的效果十分接近。在此基础上,以转向避撞为手段,选取过渡较为缓和的七次多项式规划参考路径,构建了前馈与反馈相结合的跟踪控制策略,通过车辆转向与悬架统一动力学模型的避撞仿真试验,表明所提出的路径跟踪控制算法有效可行,能使车辆合理避撞。