基于概率论的车辆排队长度测量方法
2020-11-03李泊霖魏小忠
李 津, 王 鹏, 李泊霖, 魏小忠
(吉林大学 交通学院, 吉林 长春 130022)
城市主干道路交叉口大多由信号灯控制车流量.当车流量大于信号灯放行的车流数时,将在交叉口向路段上游方向形成车辆排队现象,增加车辆出行时间,导致的溢流现象对上游交叉口的通行产生影响.对此,车辆排队长度对于衡量信号交叉口的运行状态、拥堵程度,评价现有信号配时方案起到重要作用[1].交叉口处车辆排队长度是近年来交通控制领域的研究热点.测算排队长度的方法主要有3类,第1类是以交通波理论[2]为基础,将车流视为流体,用冲击波理论进行计算.王殿海等[3]以交通波理论为基础,对车辆在交叉口排队消散过程和对上下游交叉口影响进行研究分析;姚荣涵等[4]根据二流理论,建立对于单车道和多车道的排队长度计算模型;王进等[5]在建模过程中考虑到相邻交叉口间的相互作用,分析了道路信息,信号配时等参数对排队长度的影响.YANG Q. L.等[6]根据交叉口排队车辆的动态性和不确定性,推导出多车道排队长度随时间的稳态分布并考虑车辆的到达特性对交叉口排队的影响,建立排队长度模型.第2类依据概率论理论,如R. AKCELIK等[7]认为车辆到达和离去服从某种概率分布,车辆到达累计数与离去累计数之差为排队车辆数.第3类借助检测器、GPS等设备对排队长度进行检测.LI H. J.等[8]将不同的策略下检测器布局对于排队长度估计机制进行了建模和分析,提出利用单个磁传感器数据的队列长度估计的最优布局策略和相应算法.S. Y. R. ROMPIS等[9]结合二元混合统计模型和GPS探测车,对多车道交叉口排队时的车道位置进行有效识别.
文中将依据概率论理论,对到离的车辆数-时间曲线进行拟合,提出车辆的速度-距离模型,计算上下游检测器起始修正时间,对信号交叉口车辆排队长度进行测算.
1 模型研究
1.1 车辆排队长度计算原理
在城市道路中,大部分交叉口由信号灯控制车辆运行.受上游交叉口信号灯控制,车辆以某种规律驶入路段,行驶一段时间到达下游交叉口,又受下游交叉口信号灯控制,以某种规律驶离交叉口.在这个过程中,经过修正时间后上游驶来的车辆数与下游交叉口驶出的车辆数之差,即为下游交叉口车辆排队长度.
1.2 检测节点布设
假设一条封闭道路,车辆只通过一个入口进入道路.在道路入口布置检测器①,检测驶入检测路段的车辆数;在停车线前布置检测器②,检测驶离检测路段的车辆数,如图1所示.

图1 检测器布设位置示意图
1.3 车辆排队长度计算模型
1.3.1检测断面车流特性
运用检测器①对驶入待测路段的车辆数进行检测,将离散型车流量数据进行曲线拟合,得出上游断面车辆数-时间的变化曲线为
ω1(t)=σ1(t),
(1)
式中:σ1(t)为上游离散型车流量数据随时间t的变化值;ω1(t)为曲线拟合后的上游断面车辆数-时间的关系曲线.
运用检测器②对驶离交叉口的车辆数进行检测,将离散型车流量数据进行曲线拟合,得出道路下游停止线断面车辆数-时间的变化曲线为
ω2(t)=σ2(t),
(2)
式中:σ2(t)为下游离散型车流量数据随时间t的变化值;ω2(t)为曲线拟合后的下游停止线断面车辆数-时间的关系曲线.
1.3.2起始修正时间
由于上游检测器断面与下游交叉口断面之间存在距离L,车辆需一定的时间由上游检测器行驶至下游交叉口,如图2所示,图中①号车在0 s时经过检测器①,在t0时到达交叉口排队所以上游车辆计算起始时间为0 s,下游交叉口车辆起始修正时间为t0.图2中r0为交叉口起始车辆排队长度,是t0时交叉口处车辆排队长度.
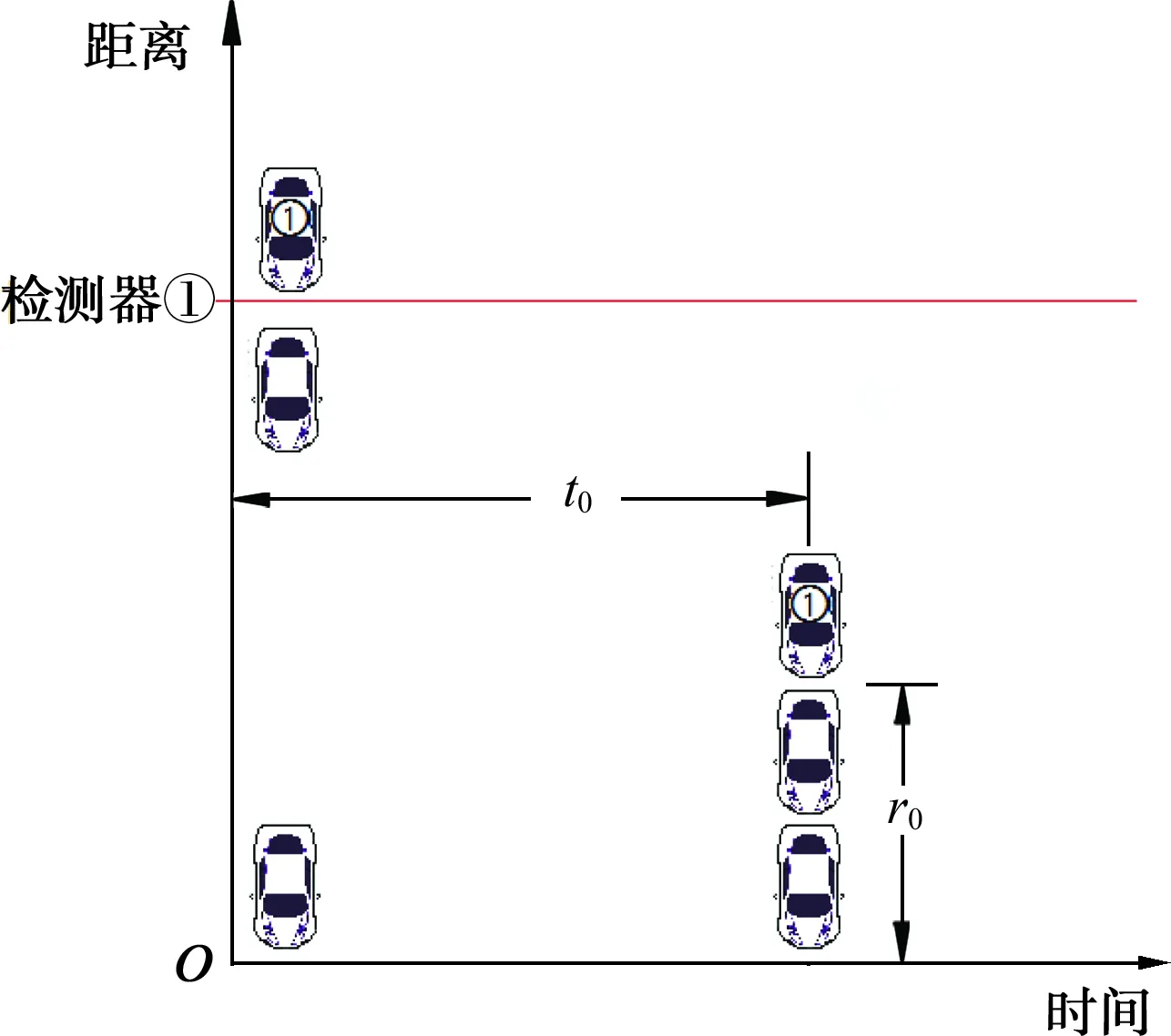
图2 上下游起始时间示意图
引入车辆行驶时的速度-距离模型,用于计算t0的取值.
1.3.3速度-距离模型
车辆在路段上以自由流行驶时,车辆速度大致分为3个阶段:起步阶段,平稳行驶阶段,减速停止阶段.起步阶段车辆启动加速到一定的稳定速度后,进入平稳行驶阶段.在平稳行驶阶段中,车辆以相对稳定的速度行驶,直到出现前方车辆排队或者信号灯为红灯时,车辆进入减速阶段.在减速阶段,车辆速度减小,直至停止.车辆加速阶段受车辆自身性能、当前的道路条件、交通环境、驾驶员驾驶习惯等因素影响,距离与速度存在一种函数关系;减速阶段亦然,如图3所示.图3中,la,lb,lc分别表示车辆在加速阶段、平稳行驶阶段、减速阶段所经过的距离;车辆在加速阶段、平稳行驶阶段、减速阶段所行驶的时间分别表示为ta,tb,tc.

图3 速度与距离关系示意图
在实际道路中,当车辆驶过检测器①时,车辆已进入平稳行驶状态,所以车辆在检测器之间行驶经历了平稳行驶阶段和减速阶段.汽车减速过程可视为匀减速过程,得
(3)
式中:vb为车辆平稳阶段的行驶速度;g为重力加速度;μ为道路摩擦力系数.
因此,车辆在减速阶段时,当vb,μ已知时,可以计算出减速阶段行驶距离lc和行驶时间tc.由此可以计算出在2个检测器间的路段L上,车辆在平稳行驶阶段行驶的距离lb和时间,计算式为
(4)
式中:lcar为一辆车的长度.t0计算式为
t0=tb+tc.
(5)
1.3.4建立车辆排队长度模型
根据道路车辆排队长度等于驶入该道路的车辆数减去驶离车辆数,将式(1)-(2)所得的函数求积分相减,再加上当前道路的初始排队长度,即为该道路的车辆排队长度,计算式为

(6)

2 实例分析
选取长春市红旗街和湖西路交叉口交通数据,对文中提出的方法进行试验验证.
2.1 交叉口实际情况
如图4所示,红旗街为双向4车道,其中车道①为直行加右转,车道②为直行加左转.交叉口信号配时方案采用两相位,红旗街方向配时方案为绿灯90 s,黄灯4 s,红灯70 s.检测器①与检测器②之间距离L为300 m.

图4 红旗街与湖西路交叉口示意图
2.2 车辆排队长度模型标定
2.2.1检测断面车流特性
文中选取10 s作为1个间隔,对该交叉口车辆数进行统计分析.运用检测器①检测驶入待测路段的车辆数,得到车辆数Q与时间t关系曲线如图5所示.

图5 到达车辆的车辆数-时间散点图
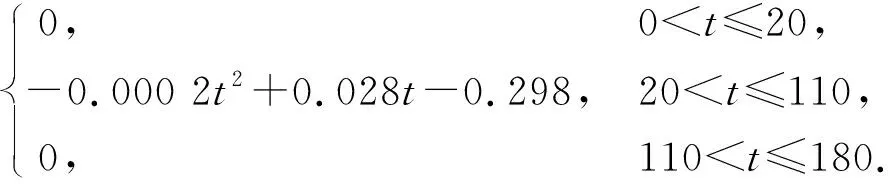
用spss软件将离散型车流量数据进行曲线拟合,得出上游断面车辆数-时间的关系曲线为
(7)
运用检测器②对驶离交叉口的车辆数进行检测,得到的Q-t关系如图6所示.

图6 离去车辆的车辆数-时间散点图
将离散型流量值进行曲线拟合,得出道路下游停止线断面车流量随时间的变化曲线为
(8)
2.2.2起始时间修正
根据实际观测,道路在0时刻时车辆排队长度r0为11辆,道路平均车速vb=40 km·h-1=11.11 m·s-1,检测道路为沥青路面,道路摩擦力系数μ取0.8.代入式(3)-(4)得
(9)
代入式(5)得t0=22.7 s.
2.2.3道路车辆排队长度
综上所述,可得到道路车辆排队长度的计算公式为

(10)
2.2.4模型结果分析
按照上述公式代入计算,以10 s为间隔输出数据,得出t时刻的道路车辆排队长度r(t).根据现场调查情况,得出实际道路排队车辆数R(t).为更好地说明车辆排队长度模型计算的准确性,这里引入相对误差模型[10],计算式为
E=|(R(t)-r(t))/R(t)|×100%,
(11)
式中:E为相对误差;R(t)为观测到的车辆排队长度;r(t)为计算得到的车辆排队长度,结果见表1.

表1 车辆排队长度模型计算结果
根据E的计算值,除在30,70 s两个点之外,剩余时间点均小于6%,计算精度较高;30 s与修正时间t0间隔较小,计算误差较大;70 s时,驶入车辆数-时间拟合曲线处于曲线拐点位置,误差相对较大.
3 结 论
在交叉口上游道路和交叉口处分别布置检测器,对通过检测器的车辆数进行统计,拟合驶入和驶离待测路段的车辆数-时间关系曲线,计算起始时间修正,进行建模分析.与传统方法相比,本方法所需数据便于取得,计算简单方便,对检测器要求低,布设简单,便于大规模布设.研究成果可用于评价当前时间段路段的交通状态分析,可以为交通流分析、道路服务水平评估、道路拥挤情况监测等提供数据.
