力臂调节装置反调的成因及启示
2020-11-02孙波
孙波


摘要:力臂调节装置是飞机纵向操纵系统的重要组成部件,普遍应用于二代飞机。力臂调节装置通过传感器感受飞机高度、速度的变化适时调整力臂输出,利用“杠杆”作用来调节飞机纵向操纵系统的传动比,从而使飞行员在不同高度、不同速度下对飞机操纵有较一致的操纵感觉。若力臂调节装置在空中发生故障,将影响飞机纵向操纵系统的舒适性和安全性,严重故障可能会造成飞行等级事故,因此保持力臂调节装置的高可靠性对飞机操纵系统具有重要意义。本论述从力臂调节装置反调故障人手,分析该故障形成的原因,制定改进措施并进行验证,从根源上杜绝该问题的再次发生,有助于提高产品的可靠性。
关键词:飞机操纵系统;力臂调节装置;反调
中图分类号:V267 文献标志码:A
1系统组成及原理
力臂调节装置用于二代飞机纵向操纵系统,根据飞行表速和高度变化,按特定的非线性调节规律自动的调整该表驾驶杆到水平尾翼和弹簧载荷机构之间的传动比,操纵飞机平尾,从而保证飞机在不同的飞行速度和不同的飞行高度时,具有比较一致的操纵性能。该系统由电动机构、控制盒和位置指示器组成。系统作动电路原理如图1所示。
产品作动电路原理由一级差分放大电路、二级差分放大电路、两组施密特触发器电路以及两组驱动电路、电机组成。在一级差分放大电路中,动静压组合传感器将来自空速管的气动参数(即动压与静压)以单一电信号输出,当传感器中的动静压发生变化时,其电位计的电阻值即发生变化,使桥路的平衡发生变化,差分放大电路输出一个失调电压;该失调电压经过二级差分放大电路的放大,当二级差分放大电路的输出电压达到施密特触发电路的触发电压时,使其中一个触发电路翻转,输出一个阶跃信号,这一阶跃信号通过驱动电路的功率放大,驱动电机工作,自动改变电动机构力臂值,并带动回输电位计,使失调电压减小,当失调电压减小到施密特触发器释放电压时,触发器关闭,电机断电,即完成一次力臂调节。
2故障现象
力臂调节装置在某次试验过程中发生了电动机构既伸出又收回(即反调)的故障现象。经重复试验验证,该故障一直存在,因此判定该故障为“硬故障”,随即开展故障分析、验证。
3故障排查
通过对故障现象分析和故障树排查,该故障是由电动机构和控制盒引起,具体见以下排查情况。
3.1电动机构电机排查
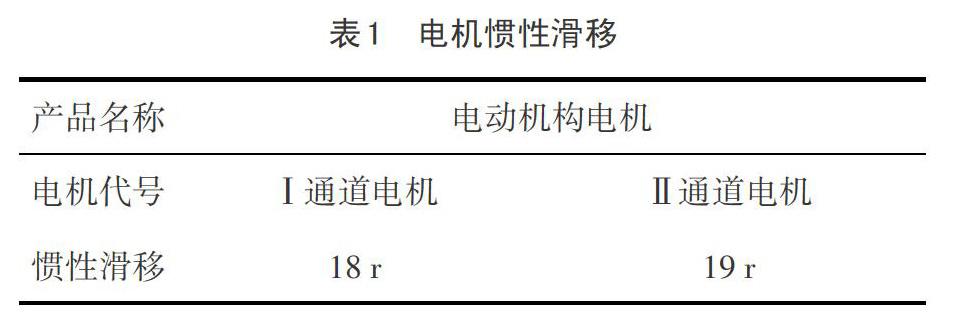
对该力臂调节装置电动机构I通道、Ⅱ通道的电机惯性滑移进行测量,结果见表1所列。
通过表1可知,该电机在使用一段时间后,电机惯性滑移存在超差现象。通过对电机惯性滑移事件进行排查,得出电机惯性滑移超差是由于石棉摩擦材料的工作磨损,离合器间隙变大,摩擦因数下降,导致其惯性滑移增大。通过计算分析,当电机惯性滑移超过62 r时,才能达到电机调节需要的步长,力臂调节装置才会产生反调现象,但该电机的惯性滑移仅为19 r左右,因此,电机惯性滑移超差这一单一因素不足以导致力臂调节装置反调,但可以确定的是惯性滑移是造成该故障的原因之一。
3.2控制盒稳压二极管排查
故障发生后,初步判断为该力臂调节装置控制盒内部稳压二极管失稳,經送三方进行失效分析。常温下,稳压二极管测试的电参数见表2所列。
该第三方机构给出的分析结论如下:“二极管工作电压小幅超差,但未出现电压波动的原始失效现象。请用户排查线路中电压波动是否与稳压二极管工作电压偏大有关。目前无法排除使用中外引线焊接不良导致电压不稳的可能性”。
经现场验证、分析,产品在试验过程中电压保持在28+0.5 v范围内,不存在电压偏大的情况;将该二极管所属电路板在高倍显微镜下检查,未发现引线虚焊等焊接不良现象。
因此,通过表2参数分析,稳压二极管工作电压(vz)略大,但不影响产品正常工作,与产品故障无关,因此排除该故障点。
3.3控制盒调试电阻排查
通过对差分放大电路进行测试,发现当一级、二级差分放大电路中的调试电阻R1、R2(调试电阻值范围为1 kΩ-1.4 kΩ)任意一个的阻值较小时,产品容易出现反调,两个调试电阻阻值同时变小时反调更严重。经查,控制盒的调试电阻R1、R2的阻值均为1.1 K,在此阻值下v1、v2二极管集电极电压在产品动作后均不平衡,且v1集电极电压差更大,表现为在向小臂动作时故障更容易出现。因此该因素为故障的主要因素。
4机理分析
通过以上排查分析,导致该故障的主因是差分放大电路中的两个调试电阻偏小,导致在此阻值下v1、v2二极管集电极电压在产品动作后均不平衡,次因是电机惯性滑移偏大,增大了v1、v2二极管集电极电压差值,进一步加大了产品调节后的不平衡。
具体机理如下:当电动机构运动使一级差分放大电路中的桥电路达到平衡时,电机断电,电动机构停止工作。由于电动机构的电机滑移偏大,带动电动机构中的回输电位计阻值继续变大。若控制盒中调试电阻R1、R2偏小时,恒流源的电流增大,在二级差分电路放大倍数一定时,会导致平衡电位va、b升高,此时v1、v2二极管更容易导通,进而使施密特触发电路更容易翻转,输出的阶跃信号控制其对应的驱动电路工作,驱动电机反向旋转,使电动机构反向作动。当回输电位计阻值再次变化到一级差分放大电路中的桥路再次达到平衡,电动机构停止工作,表现为产品在向前动作时反向作动,即出现反调现象。
5故障定位
(1)电机在使用一段时间后,离合器间隙变大,导致其惯性滑移超差;
(2)控制盒中的调试电阻R1、R2的调试阻值偏小,使得系统灵敏度高、稳定性差;
(3)在上述两条因素的共同作用下,当电机惯性滑移较大时会导致产品出现反调现象。
6故障复现
通过机理分析,我们人为增大电动机构电机的惯性滑移量(约20 r),并将控制盒内调试电阻R1、R2更换为1 K电阻,在DC28 v下重新进行试验,使该故障很容易得到复现;同时我们在该产品上重新调整电机惯性滑移量(约10 r),并调整控制盒内调试电阻R1、R2,使产品在DC24.3 V-DC29.7 V电压范围内,控制盒V1、V2集电极电压控制在5 V-8 V,且两者差值小于1 V,故障消失。7改进措施
7.1电机
在电机装配时进行控制,保证离合器间隙在0.15 mm-0.2 mm,惯性滑移由不大于16 r内控为不大于12 r。
7.2控制盒
细化调试工艺,产品在DC24.3 v-DC29.7VT-作电压范围内,控制盒V1、V2集电极电压控制在5 V-8 V,且两者差值小于1 V。
8结束语
力臂调节装置属二代飞机纵向操纵系统的重要组成部件,在飞机纵向操纵系统中具有特殊重要性,如果力臂调节装置在空中发生故障,将影响飞机的纵向操纵性和安全性,严重故障可能会导致飞行等级事故。因此要保证力臂调节装置的高可靠性,就需要在产品实现的细节上下功夫。该故障提示我们在电机惯性滑移控制、产品电气参数调整、系统参数鲁棒性等方面要摸索规律,形成相应生产规范,做到精益求精。
