块状食品拾放的并联机器人
2020-11-02李克锋
李克锋
南阳医学高等专科学校(南阳 473000)
随着世界工业技术的快速发展,各行各业的生产线均在朝着自动化、智能化的方向发展,中国的食品包装行业大部分还在依靠人工,尤其是上料拾放这种重复性的劳动,依靠人工不仅工作强度大,而且卫生不能保证,所以急需一种高速、稳定的拾放机器人来代替人工[1-2]。并联机器人具有结构简单、速动快、精度高等优点[3-5],非常适用于拾放工序,因此设计一种三自由度并联机器人用于方形块状食品上料工序的拾放,并对其模态作了分析。
1 机器人基本结构
由于方形块状食品的上料工序,块状食品只可能有X、Y、Z3个方向的平动,而没有旋转运动,能完成X、Y、Z3个方向平动的三自由度并联机器人就能够适用于此工序。其结构如图1所示,此并联机器人主要由静平台、动平台、3个相同结构的运动铰链及末端执行器组成[6-8]。运动铰链与静平台之间通过转动副连接,与动平台通过球面副连接。驱动元件采用伺服电机,3台相同的伺服电机分别驱动3根运动铰链,使其各自绕静平台作摆动,此运动通过运动铰链与动平台的转动副传递到末端执行器,从而实现末端执行器在X、Y、Z3个方向的平动。
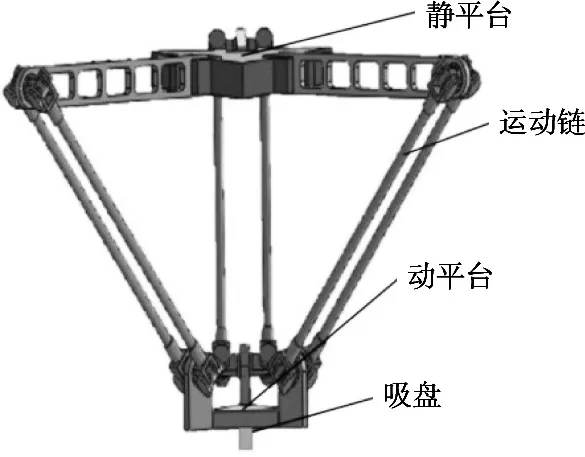
图1 机器人结构模型
2 关键部件结构设计
2.1 运动链的设计
运动链是连接动平台与静平台的关键部件,且将伺服电机的运动传递给动平台,从而实现动平台在X、Y、Z3个方向的运动。它主要由主动臂、从动臂和虎克铰组成,结构图如图2所示,主动臂与装在静平台上的伺服电机相连,从动臂通过虎克铰与动平台相连,主动臂与从动臂之间也通过虎克铰连接[9],从动臂由两根等长的直杆组成,直杆与上下连接的虎克铰组成平行四边形,此结构能够保证末端执行器只可以做X、Y、Z方向的平动,而不能作绕3个方向的转动。
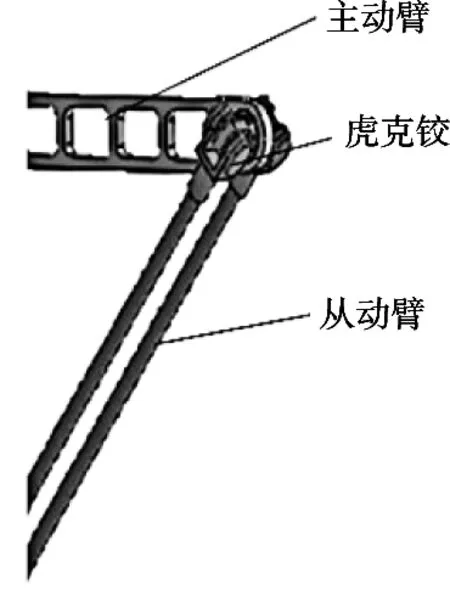
图2 运动链结构图
2.2 保护装置设计
并联机器人一般在较高的工作速度下运动,一般会根据实际工况设定主动臂在一定范围内绕静平台做摆动[10-11],如若主动臂在运动过程中超过设定的动范围,会与静平台发生碰撞,对机构造成损害,所以为了避免主动臂在运动过程中超过设定的运动范围,一般会设计软限位和硬限位,软限位是在静平台上装有接近式传感器,在主动臂上装有感应片,主动臂运动到极限位置时,感应片会触发传感器,从而发射信号使主动臂停止运动,硬限位是机械限位,它是装在静平台上的橡胶柱,主动臂碰上时会起缓冲作用,并能强制主动臂停止运动,从而起到避免主动臂与静平台发生碰撞的作用。其结构简图如图3所示。
图3 保护装置结构简图
2.3 末端执行器的设计
末端执行器是机器人的执行部件,如果设计不合理会对产品造成损害,气动吸盘具有成本低、易使用、无污染等优点,比较适用于抓取块状食品等轻量的产品。气动吸盘一般有2种形式:带缓冲的和不带缓冲的,由于块状食品属于易损坏部件,所以选用带缓冲的气动吸盘。其原理如图4所示,吸盘通过通气孔与气动设备相连,吸盘接触到工件时,气动设备通过通气管将吸盘内的气体抽走,使吸盘内形成真空,内外压力差会使工件被吸附在吸盘上,机器人将工件运送到指定位置时,气动设备通过通气孔往吸盘内充气,内外压力差变小,工件在重力作用下与吸盘分离。
吸盘的选取一般根据吸附力大小及口径大小,而这2个尺寸又与搬运工件的尺寸及质量有关,所以可以根据工件的尺寸及质量选取气动吸盘,及与之相配的气动设备。

图4 缓冲气动吸盘原理图
3 机器人的模态分析
模态分析理论是20世纪30年代发展起来的,它是在阻抗与导纳的感念上吸收振动分析及数据处理等知识形成的,对机器人的结构做模态分析,可以得到结构的固有动态特性,得到其固有频率和阵型,从而得到结构设计的不合理的地方,并可以有根据地加以改正[12],该节利用ANSYS软件的Workbench软件对机构做模态分析。
3.1 模态分析理论基础
把并联机器人看成是一个由无数质点组成的系统,而且它是一个复杂多自由的系统,描述多自由度系统的离散振动的动力学运动方程为[13-14]:

式中:[M]为质量矩阵,[C]为阻尼矩阵,[K]为刚度矩阵,{x}为加速度响应向量,{x}为速度响应向量,{x}为位移响应向量。{F(t)}为激振力向量,由于机器人的模态分析是不受外力的自由振动,所以{F(t)}=0。
在不考虑阻尼的情况下,系统为简谐振动,即{x}=Xsin(ωt),设系统矩阵S=M-1K,经过计算整理可得:

可得方程有N个解ωi(i=1, 2,L,n),也就说系统有N个固有频率,而对于一个多自由度的系统,固有频率对系统的影响随着阶级增大而减小,所以系统的振动特性可以由低阶固有频率有效反映出来,所以在做模态分析时通常对前六阶频率做分析[15]。
模态分析可以分为4个主要步骤,分别是模型建立、施加边界条件求解、模态扩展以及结果分析和后处理。
3.2 结果分析
在Solidworks中建立并联机器人的三维模型,导入到Workbench中,设置材料属性、泊松比等参数,设定零件的约束及接触特性、各个参数设定好后,对其进行网格划分,最后建立模态分析项,设定模态数为6。
计算得到机器人的前六阶的模态阵型图及模态频率,第一、第六阶频率阵型图分别如图5和图6所示,前六阶模态频率如图7所示。由图7可以得到机器人在频率80~121 Hz之间易发生共振,由阵型图5和图6可得,运动铰链上的球面副即虎克铰位置变形最大,也就是说此位置受振动影响最大,易遭到破坏,所以在设计时需对此结构做加强处理,使其刚度增大。另外机器人在工作时,应使其频率避开89~121 Hz频率段,从而减小振动对其的影响。
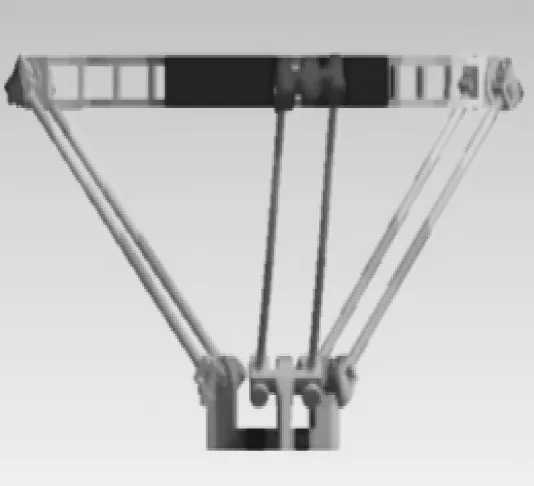
图5 第一阶频率阵型图
图6 第六阶频率阵型图

图7 前六阶模态频率
4 结论
在分析块状食品全自动包装生产线技术要求基础上,设计一种只能够在X、Y、Z3个方向作平动的三自由度并联机器人,介绍其基本结构及主要部件的设计,利用ANSYS的Workbench模块对机器人整机作了模态分析,得到机器人频率80~121 Hz之间易发生共振,通过振型图得到机器人运动铰链上的虎克铰位置最易产生变形,设计时需加强此位置的刚度,为食品包装生产线的自动化设计提供一种解决方案,为三自由度并联机器人的结构设计提供理论分析基础。