基于实例分割的视觉SLAM算法
2020-11-02何召兰何乃超张庆洋丁淑培
何召兰,何乃超,张庆洋,姚 徐,丁淑培
(哈尔滨理工大学 测控技术与通信工程学院,黑龙江 哈尔滨 150080)
0 引 言
移动机器人的智能化研究主要集中在对未知环境的探索认知、自我行为决策与规划、对未知信息的学习与表达等[1]方面,其中实现在未知环境中的自主定位导航,是移动机器人智能化研究的基础与重点。要实现这一功能,不仅需要精确估算出每一时刻移动机器人的位姿信息,还要对每一时刻机器人所处位置的环境信息进行准确描述。1887年,Smith等提出了一种定位与构图同时进行的方法[2],从此拉开对同步定位与地图构建(simultaneously localization and mapping,SLAM)研究的序幕。SLAM也成为了实现移动机器人智能化导航的关键技术。
SLAM算法即是移动机器人从未知环境的某一地点出发,在运动过程中重复地读取传感器观测数据,分析获取环境特征与自身位置姿态,并以此实时构建周围环境的增量式地图[3]。其中,视觉传感器相比于其它传感器能够获得更丰富的图像信息,同时视觉传感器轻巧廉价、易于安装[4],因此基于视觉传感器的SLAM研究成为了当下研究热点。视觉SLAM的实现主要有特征点法和直接法[5],其中,特征点法具有运行稳定、对光照及动态物体不敏感等优点[6],因此本文主要针对特征点法展开分析。近年来,随着基于特征点法的视觉SLAM算法不断发展,已经可以实现在特定的场景下的实时跟踪定位。然而,目前主流的视觉SLAM系统仍然存在以下几个问题:①在特征匹配的过程中容易受到噪声和误匹配点的干扰,鲁棒性较差。②无法从场景中提取语义信息,仅能生成包含几何信息的地图,无法满足机器人执行更高级任务的需求。因此本文将深度学习方法引入到视觉SLAM算法框架当中,优化了图像特征匹配过程,实现了位置信息和语义信息的融合。
1 视觉SLAM算法
1.1 SLAM数学模型
移动机器人在一个未知环境中运动,首先要建立固定不变的世界坐标系,根据机器人自身传感器数据精准的建立时间与世界坐标系空间的对应关系,即在世界坐标系下描述各个时刻移动机器人自身位置及其所处环境,这是SLAM解决定位与构图问题的核心。视觉SLAM的自身传感器为相机,因此移动机器人的运动可以抽象为相机在世界坐标系下的刚体运动。具体形式如图1所示。

图1 坐标系变换
图1中(xW,yW,zW)为世界坐标系,(xC,yC,zC)为移动坐标系,即相机所在坐标系,点P为世界坐标系空间一点,是路标(landmark)的抽象描述,路标是场景中比较有辨识度的物体或者区域。在每个时刻,传感器会观测到一部分路标,得到它们的观测数据。设t时刻,相机观测到空间点P,在移动坐标系下该观测点坐标为(Ctpx,Ctpy,Ctpz),而t+1时刻,该空间点在移动坐标系下的坐标为(Ct+1px,Ct+1py,Ct+1pz),那么相机的运动方程如式(1)所示
(1)
其中,ΔT为t时刻到t+1时刻相机的位姿变换矩阵。
根据运动方程可知,若已知移动机器人的初始位姿,就可以通过各个时刻的观测数据,估算出移动机器人在世界坐标系下的位姿,同时利用位姿变换信息,可以解算出各个路标点在世界坐标系下的坐标,构建全局一致的地图。根据以上分析,可以得到SLAM的数学模型,如式(2)所示
(2)
其中,xt为t时刻移动机器人的位姿,zt,k表示移动机器人在xt位置观察路标WPk的观测数据。wt与vt,k为噪声。
1.2 传统视觉SLAM算法框架
随着国内外学者对视觉SLAM算法的不断研究改进,视觉SLAM已经形成了一套较为完整的算法框架。如图2所示。
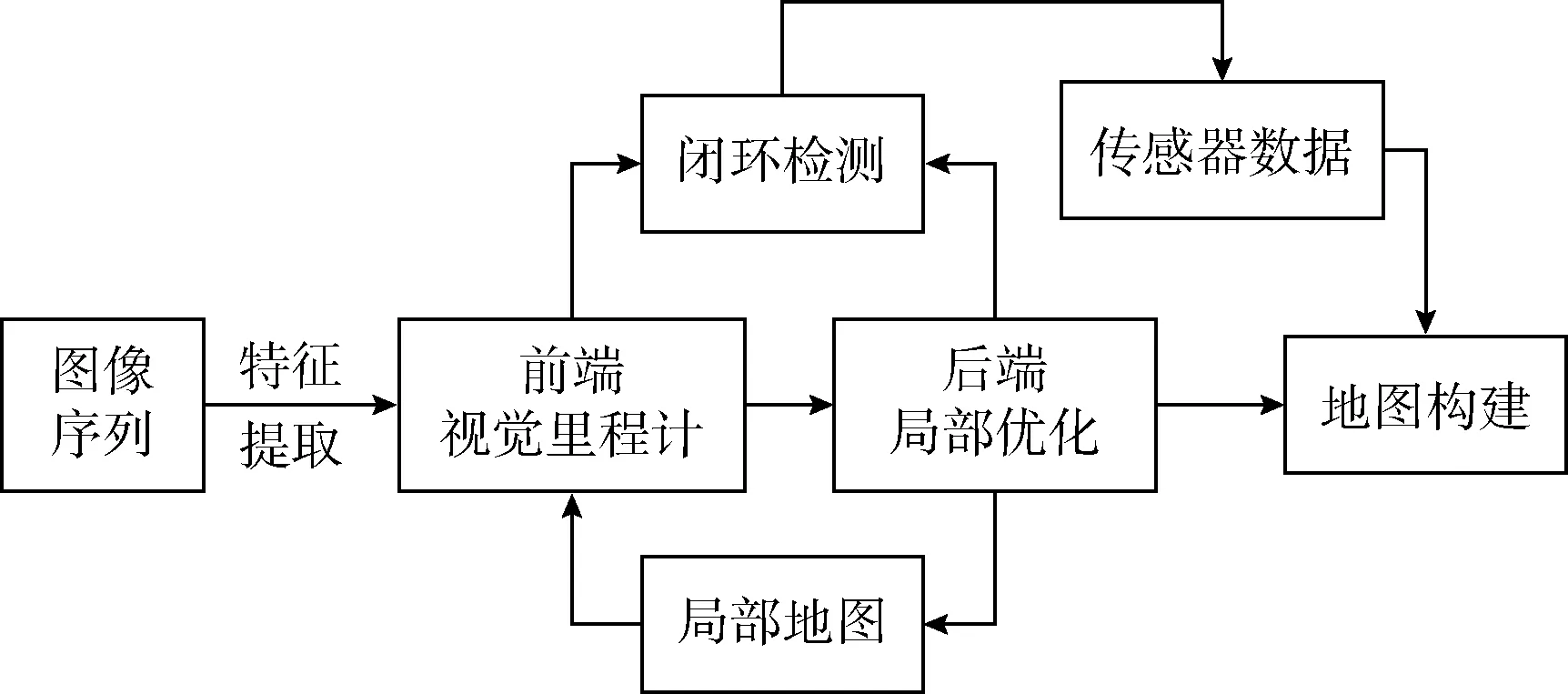
图2 视觉SLAM算法框架
视觉SLAM主要由前端视觉里程计、闭环检测、后端局部优化以及全局地图构建4个部分构成[7]。其中视觉里程计[8]主要通过相邻两帧图像来估算移动机器人当前时刻的位姿变化,根据SLAM数学模型分析可知,机器人位姿是通过传感器测量的路标观测数据解算得到的。在视觉SLAM算法中,传感器测量的路标观测数据为相机采集的图像帧的特征点集。因此计算机器人位姿首先要提取图像特征点。图像特征点是那些经过算法分析出来的,含有丰富局部信息的点[9]。在完成相邻的两帧图像F1,F2的特征点提取之后,需要进行图像特征匹配[10]。特征匹配解决的是相邻两帧图像特征点集数据的关联问题,即确定当前所观察的路标点是否与上一时刻的路标点为同一个。经过特征匹配获得一组组匹配的特征点对,如式(3)所示
(3)
这些特征点对应的是世界坐标系下的路标点。根据SLAM数学模型,这些特征匹配点对的变换关系如式(4)所示
∀i,tPi=ΔTt - 1Pi
(4)
其中,ΔT为机器人的位移变换矩阵。在特征匹配的过程中,无法避免误差的产生,为了尽量准确获得该时刻移动机器人的位姿数据,本文采用最小化重投影误差的方法来求解位姿。如式(5)所示
(5)
视觉里程计解算出的机器人位姿是短期的,随着移动机器人的运行,估算误差将不可避免的随时间积累,因此视觉SLAM算法使用闭环检测与后端优化[11]来避免误差积累。闭环检测通过读取传感器数据和视觉里程计信息来判断机器人是否在之前曾经到达过某一位置,检测到正确的回环后,将校正信息传递给后端进行优化和计算;后端局部优化结合不同时刻视觉里程计估算出来的相机位姿数据以及闭环检测提供的回环信息进行全局优化,从而得到精确的轨迹和地图。
根据上述分析可知,传统的SLAM算法框架在估算机器人位姿时最重要的一步就是图像特征点匹配,而一帧图像的特征点数目较多,且图像特征点属于图像的局部特性,如果机器人行驶到存在大量重复纹理的场景中,会使得提取到的特征描述子非常相似,如果不对图像的特征点进行筛选,将导致较大特征点误匹配率。并且采用特征法的视觉SLAM建图为稀疏特征点地图,这种地图只能满足机器人定位的要求,而无法提供导航、避障与交互等智能化功能。
近些年来,深度学习在图像领域取得了巨大进步,为解决这些问题提供了新的思路。深度卷积神经网络结构具有强大的特征学习能力,在图像识别、图像分割以及目标检测方面取得了十分显著的效果[12]。尤其在目标检测领域,由于卷积神经网络的引入,物体检测的准确率与效率均得到了极大的提升[13]。何凯明等在Faster RCNN[14]架构的基础上提出了MASK R-CNN[15],并斩获了ICCV 2017年的最佳论文。MASK R-CNN将目标检测与语义分割[16]结合在一起实现了图像的实例分割,相对目标检测的边界框,实例分割可以获取精确到物体边缘轮廓的掩模信息;而相对语义分割,实例分割可以标注出图像上同一类物体的不同个体。移动机器人通过视觉传感器采集的图像序列包含不同类别的物体,若结合MASK R-CNN的实例分割技术优势与视觉SLAM算法提供的解算数据,不仅能够提高定位精度还能为移动机器人提供语义信息。
2 基于实例分割改进的视觉SLAM
2.1 MASK R-CNN模块构建
MASK R-CNN是一个开源的基于深度学习的图像实例分割框架,它可以有效检测出图像中的物体,并精确分割每一个实例,同时为每个实例生成高质量的语义掩模。
如图3所示,MASK R-CNN框架可以并行完成目标分类、目标定位、语义分割3项任务。不同于传统的语意分割,基于MASK R-CNN框架的实例分割不仅仅可以标注出图像中物体的语义信息,还能够区分同一类物体的不同个体,并可以用边界框(bounding box)精确定位目标物体在图像中的位置,这对于SLAM这种要求检测精度较高的任务来说十分重要。

图3 MASK R-CNN框架
MASK R-CNN主要由卷积神经网络构成,通过多分支子网络并行实现端到端的实例分割。MASK R-CNN实现实例分割的具体过程如下:
(1)将图像输入主干网络(backbone network),生成特征图(feature maps)。主干网络的卷积层由MASK R-CNN整体共享,主要的功能是学习并提取图像特征。本文使用深度残差网络(ResNet)[17]以及特征金字塔网络(feature pyramid networks,FPN)[18]相互结合构建主干网络;
(2)将特征图输入区域提议网络(region proposal network,RPN),RPN是一个轻量级的卷积神经网络结构。该网络首先利用3*3的卷积层对原图进行滑动扫描,为图像的每个像素生成锚框(anchor box),然后将锚框送入分类分支以及边框回归分支(Bbox reg),分类分支输出每个锚框存在物体的概率;而边框回归分支将锚框进行伸缩平移,使它更接近地回归于标记好的真实边界框(ground truth box),输出初步的候选框坐标及其高与宽。最后在RPN末端综合两分支的结果,并利用非极大值抑制(non-maximum suppression,NMS)[19]对锚框进行初步筛选,最终获得基于原图的候选区域(region proposal);
(3)利用ROI Align对RPN输出的候选区域的图像进行处理。ROI Align使用双线性内插的方法将基于原图的矩形候选框坐标映射到特征图上,并使所有映射到特征图的候选区域图像大小一致,使之符合全连接层(fully connec-ted layers,FC layers)的输入要求;
(4)将经过ROI Align层处理的候选区域图像送入目标检测分支及掩模预测分支,完成分类、定位以及掩模预测任务。其中掩模预测是利用全卷积神经网络(fully convolutional networks,FCN)[20]对候选区域图像的每一个像素点进行分类,生成物体的掩模,实现对候选区域图像的语义分割。
2.2 MASK R-CNN改进的视觉SLAM算法
为提高视觉SLAM位姿估计的准确性并生成语义地图,本文利用MASK R-CNN对视觉SLAM进行了改进,如图4所示。
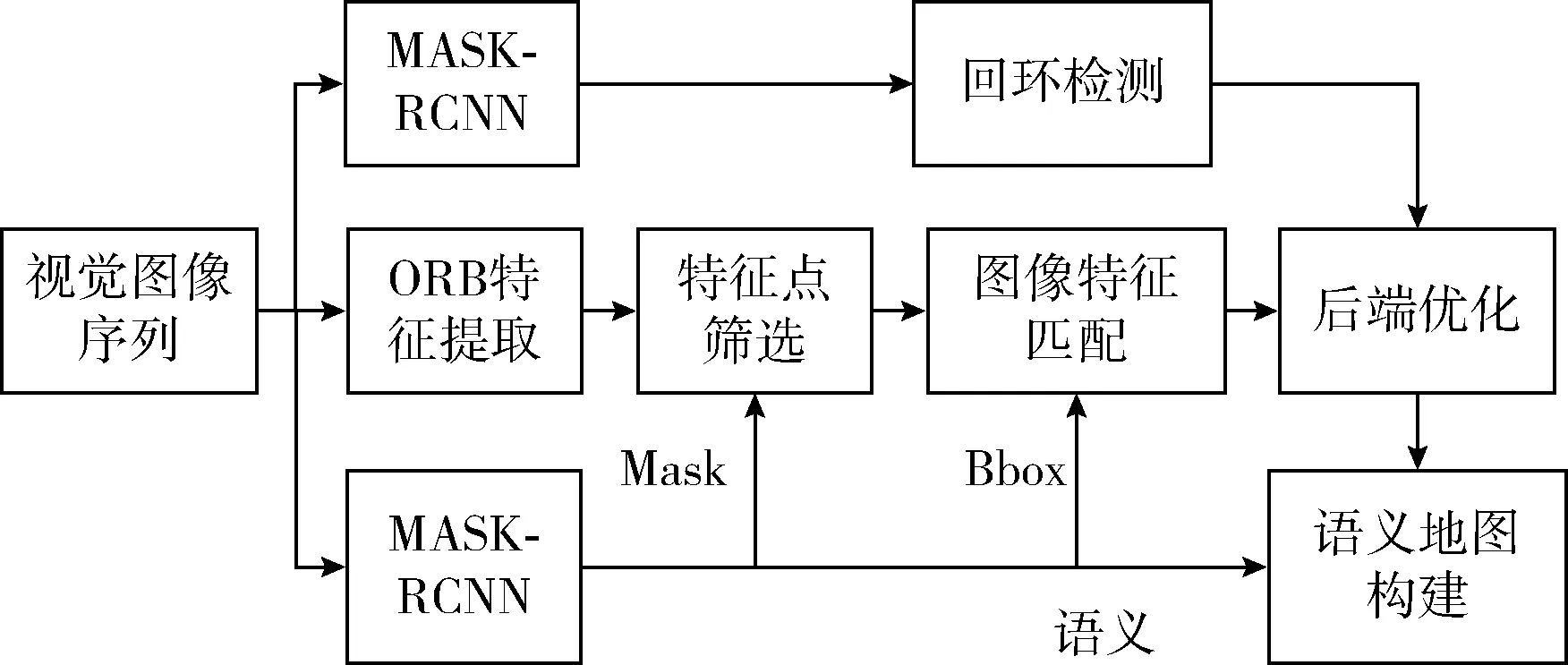
图4 基于实例分割的视觉SLAM框架
本文在传统的视觉SLAM框架的基础上引入了MASK R-CNN分支,利用MASK R-CNN的信息辅助定位并构建语义地图。具体改进如下:
(1)利用MASK R-CNN生成的掩模信息对特征点进行筛选;本文采用图像的ORB(oriented FAST and rotated BRIEF)特征作为视觉SLAM的路标特征,ORB特征是目前最具代表性的实时图像特征[21]。它改进了FAST检测子不具有方向性的问题,并采用速度极快的二进制描述子BRIEF(binary robust independent elementary features),使图像特征提取整个环节大大提速。对视觉图像进行特征提取时,将生成大量的ORB特征点,这些特征点所包含的信息是冗余的,大量的特征点不仅会加大系统的运算量,更会导致误匹配概率加大。MASK R-CNN可以对视觉图像进行目标检测,将图像进行了目标与背景的分割,本文借助MASK R-CNN的掩模信息,剔除图像背景的特征点,保留前景物体的特征点,筛选后的特征点归属不同的物体,因此ORB特征点描述子的相似性将大大降低;
(2)利用边界框信息对视觉图像进行分区,提高特征匹配效率;在传统的SLAM算法中要完成一组特征点匹配,需要遍历整幅图像的特征点,运算效率极低,而MASK R-CNN利用边界框将视觉图像划分成有语义标记的不同实例区域,在进行特征匹配时,只需要在同一实例区域进行匹配,这不仅极大提高了特征匹配的效率,更进一步减少了误匹配现象的发生,提高了位姿匹配的估算精度;
(3)利用语义信息进行回环检测;传统的SLAM算法使用对特征描述进行聚类的方法来建立词袋(bag of words, BOW)模型,而MASK R-CNN可以利用图像分类的高级语义信息更直接而准确地建立词袋模型,并实现回环检测;
(4)利用语义信息构建语义地图;MASK R-CNN可以对机器人在运动过程中检测到的物体打上语义标签,并结合SLAM框架生成带有高级语义标签的语义地图。
3 实验分析
为验证本文算法的有效性和正确性,本节对基于实例分割的SLAM算法进行实验验证。主要的验证方法为对比实验。本文采用时下应用最为广泛的ORB-SLAM2算法作为本文算法的对照组。ORB-SLAM2是ORB-SLAM的改进版本,支持单目,双目以及RGB-D相机,该算法具备传统SLAM所有的模块功能,在处理速度、追踪效果和地图精度上都取得了不错的效果。同时,ORB-SLAM2算法同样使用ORB图像特征,因此本文可以通过对比本文算法与ORB-SLAM2算法的结果来验证本文算法的效果。主要验证的指标为:特征匹配效率与精度、定位的准确性,以及构图效果。
3.1 实验数据集
实验采用两种数据集,一种是MSCOCO数据集,另一个是TUM数据集。MSCOCO数据集是微软专门为图像识别、检测以及语义分割所设计的大型图像数据集,包含超过30万张图片,200多万个实例以及80个对象类别。但该数据集的图像并不具备时间连续性,只使用该数据集无法满足实验要求。因此本文使用TUM 的freiburg1_room数据集进行扩充。TUM数据集是德国慕尼黑工业大学利用深度相机采集的一组连续的室内图像集,提供了深度相机参数以及相机在室内运动的真实轨迹(ground-truth),可以满足本文实验的需求。
为了提高MASK R-CNN在视觉SLAM算法框架中的表现力,本文在使用MSCOCO数据集训练的基础上,又使用TUM数据集对MASK R-CNN的网络参数进行微调。TUM数据集没有对图像进行标注且包含的场景单一,因此本文首先利用labelme工具对选取的图像进行标注并生成掩模,然后对图像进行裁剪、缩放以及旋转等处理,以扩充数据。经过训练后,MASK R-CNN进行实例分割最终结果如图5所示。
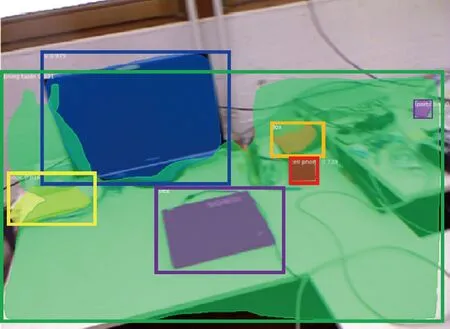
图5 实例分割
可以看出,MASK R-CNN能够较为准确检测出图中的物体,并对检测物体进行像素级别的分类。
3.2 实验对比
首先本文对特征匹配效率与精度这一指标进行验证,将TUM数据集图片分为完全相同的两组,其中一组输入传统的ORB-SLAM2算法直接进行特征匹配,特征匹配效果如图6所示。另一组输入本文的算法框架,在进行特征提取的同时,利用实例分割进行特征点筛选并优化特征匹配过程,匹配效果如图7所示。

图6 传统算法的特征匹配效果

图7 实例分割优化的特征匹配效果
通过对比,可以看出ORB-SLAM算法提取得到的特征点数目是巨大的,且在特征匹配时存在很多误匹配点,大量的特征点匹配需要进行复杂的运算,匹配效率低下,同时大量的误匹配点还会为后续的位姿估计带来较大的误差。而本文算法利用实例分割对特征匹配过程进行优化,从图中可以看出,本文算法进行特征匹配的特征点对较少,且匹配点均位于已分割出的语义区域,因此误匹配现象较少。
接下来,本文对定位精度这一指标进行验证。视觉SLAM能够实时估算出移动机器人位姿,若将各个时刻的机器人位姿连接起来,就形成了机器人运行轨迹。TUM数据集提供了采集图像时机器人运动的真实轨迹,如图8所示。
因此通过比较SLAM估算得到的运行轨迹与真实轨迹的差值,如式(6)所示

图8 TUM数据集真实轨迹
(6)

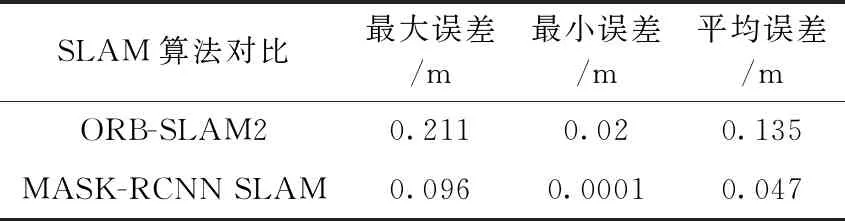
表1 运行轨迹差值
根据表1中数据显示,本文算法的运行轨迹更加接近于真实轨迹,故基于实例分割的视觉SLAM算法的定位精度更高。
最后对本文算法的构图模块进行验证。基于特征点法的视觉SLAM算法通常构建的为稀疏特征地图,这种地图无法具体的描述机器人当前所处的环境。随着计算机硬件的发展,构建稠密的三维点云地图成为了当前的主流,如图9所示。这种地图虽然可以直观反应环境信息,但对于计算机来说,该地图只不过由三维点云堆积而成,机器人无法凭借该地图执行更高级的智能任务。本文利用MASK R-CNN的语义信息构建了具有语义信息的点云地图。该点云地图的点云像素被赋予了高级语义信息,为直观描述,本文利用不同颜色来标注语义,如图10所示。通过语义信息,移动机器人可以完成如自主导航、人机交互等高级任务。
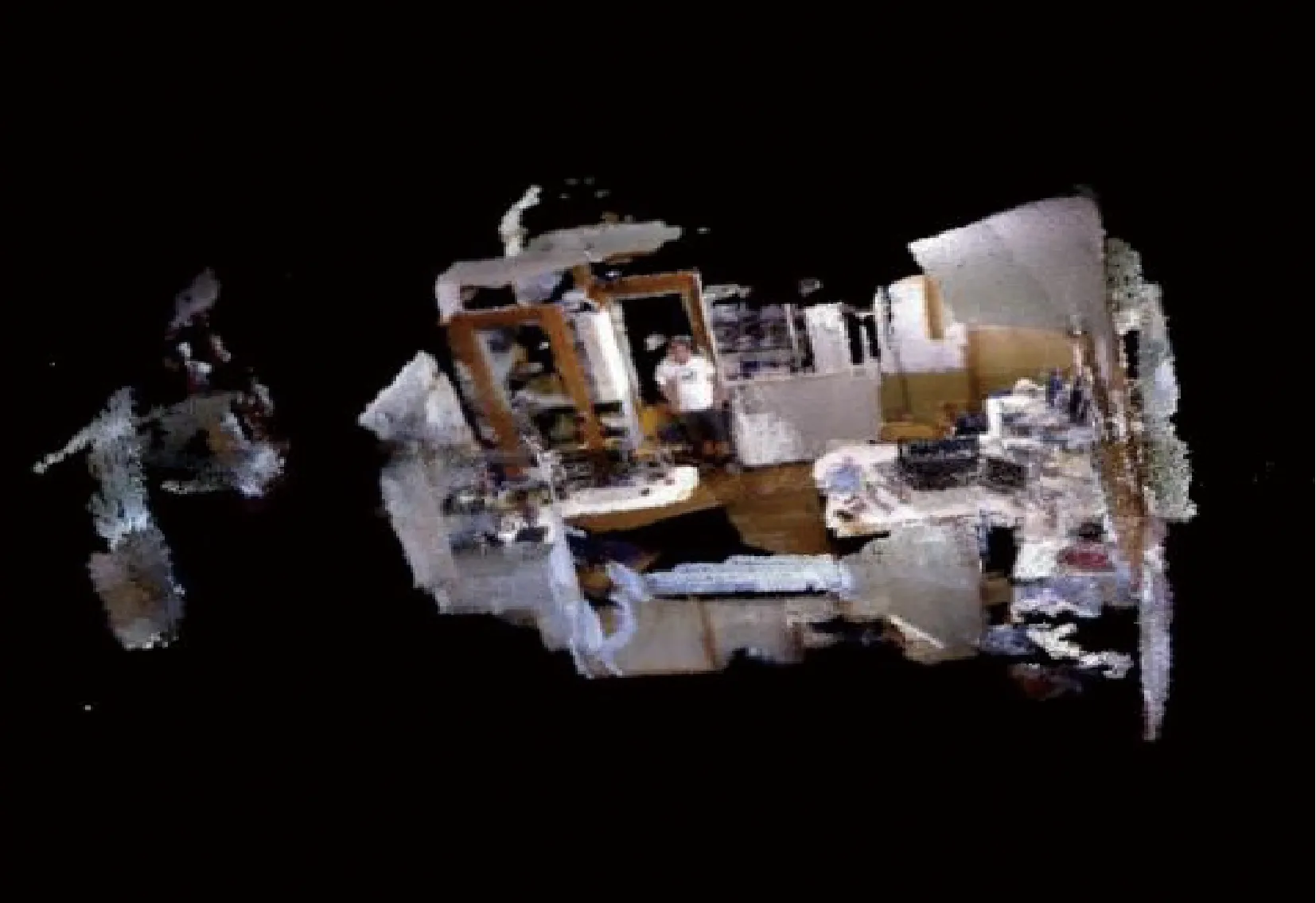
图9 三维点云地图
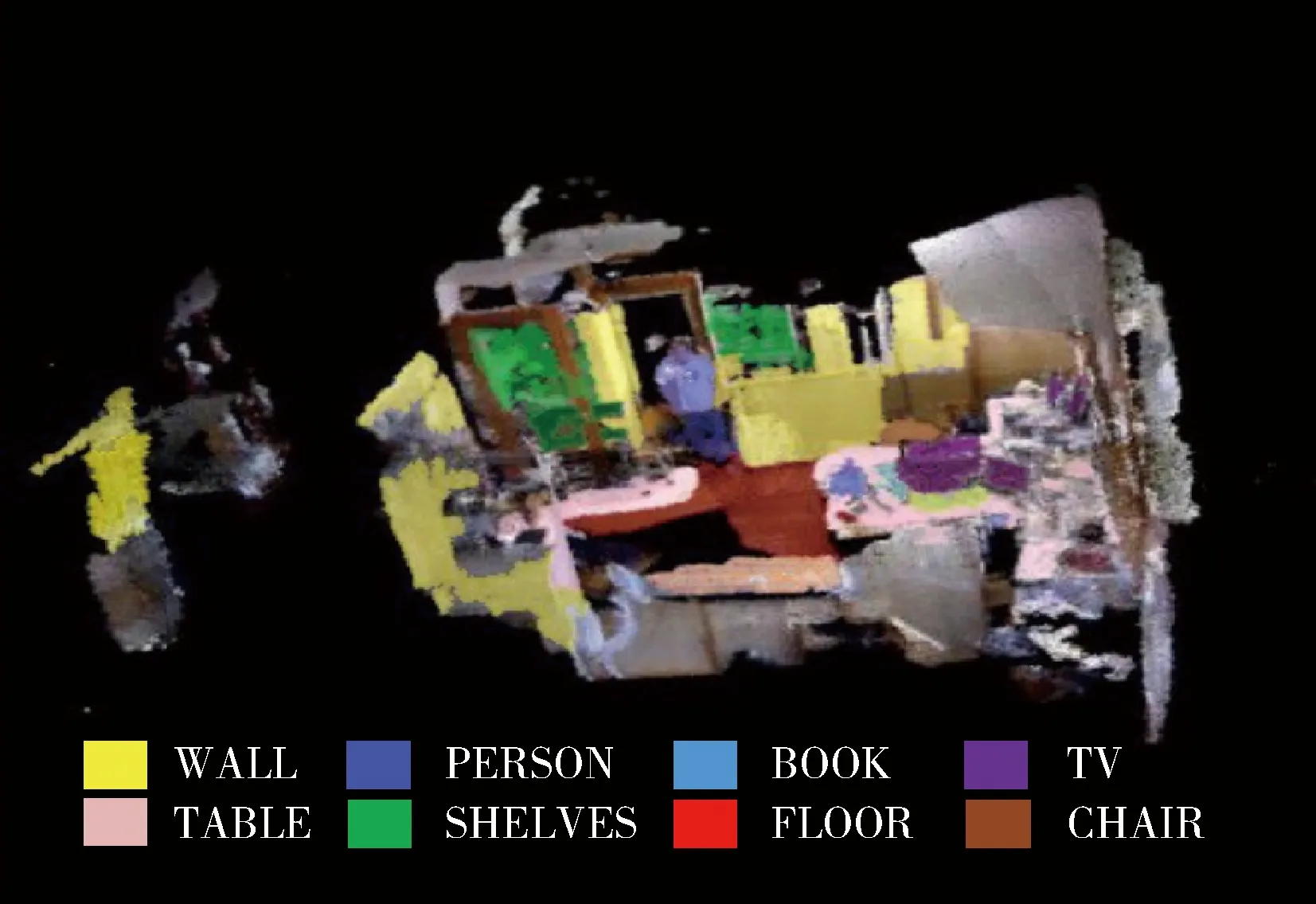
图10 语义地图
4 结束语
基于实例分割的视觉同步定位与地图构建算法将MASK R-CNN作为一个独立的分支引入到传统的视觉SLAM框架当中。通过理论分析以及实验验证,可以得到以下结论:①利用实例分割可以辅助完成SLAM的定位过程,提高了定位的精确性、鲁棒性以及定位速度;②MASK R-CNN能够对视觉图像进行目标检测,并对检测到的物体进行像素级别的分类,赋予三维点云地图语义信息,构建具有语义信息的三维点云地图。满足了移动机器人执行更高级的智能化任务的需求。下一步,本文将进一步的将深度学习引入到视觉SLAM框架中,利用深度学习在图像特征提取方面的优势,真正实现端到端的机器人定位与语义地图构建。
