具有时变时延不确定网络系统的量化控制∗
2020-11-02冯宜伟任方杰
冯宜伟 任方杰
(兰州理工大学电气工程与信息工程学院 兰州 730050)
1 引言
在网络控制系统(Networked Control Systems,NCSs)中传感器、控制器和执行器等系统组件通过实时网络进行信息交换。与传统的控制系统相比,NCSs具有成本低,可靠性高,简便安装和维护以及易于实现远程控制等优点,因此被广泛应用于工业控制、智能交通、航空航天[1~3]等领域。然而由于数据在网络传输过程中的不确定性,可能会导致数据传输时间延迟和失包等问题,并且时间延迟的存在将导致动态系统的性能降低和不稳定,同时也给控制系统的分析和设计带来了更大的复杂性。因此,如何对NCSs 进行稳定性分析与控制器综合,是当前研究的重点。
在网络环境中,时间延迟是随机的且不断变化,这种变化可以用Markov 跳变模型来描述。近年来,关于网络Markov 跳变系统得到了广泛的研究[4~8]。文献[4]研究不确定时变时滞广义连续系统的鲁棒稳定性问题,通过采用凸不等式和Jensen不等式降低了系统稳定的保守性。文献[5]针对具有时延和丢包的不确定NCSs提出了一种新的稳定性判据,利用自由加权矩阵和Newton Leibniz公式,引入Jensen 积分不等式,构造了具有两个Markov链的时变时滞系统,使其具有更好的稳定性。文献[6]建立了离散切换系统,进而采用Markov 随机过程理论和切换系统理论,结合线性矩阵不等式(LMI)给出了系统满足相应随机均方指数稳定的充分条件。文献[7]采用Markov 随机过程对含有时延的NCSs 进行建模,利用凸组合方法和改进的Wirtinger 积分不等式得到系统较弱的保守性。文献[8]研究了含有双边随机时延的NCSs 稳定性的问题,通过将双边时延的跳变特性描述为一个有限状态的Markov 随机过程,并将NCSs 建模为参数不确定的离散时间跳变模型,给出了时变控制器的设计方法,但它考未虑NCSs 中量化作用的影响。基于以上分析,学者们都取得了丰硕的研究成果,但时滞NCSs 的稳定依赖性仍有待提高。此外,外界扰动对NCSs 性能的影响也不可忽视。因此在NC⁃Ss 中,鲁棒H∞控制器的设计也一直是学者们研究的热门课题。文献[9]研究了具有时变时延和分组的NCSs 的稳定性,其被建模为两个独立的Markov跳跃模型,并且针对外界扰动给出了H∞控制性的充分条件。文献[10]研究了离散时间奇异Markov跳变系统在转移概率部分未知时的静态输出反馈鲁棒H∞控制问题,给出了满足系统的随机稳定性条件。文献[11]研究了具有输入输出量化的不确定离散线性系统的鲁棒稳定性问题,针对具有范数有界不确定性和双重量化的闭环系统,提出了LMI的充要条件,但文献尚未考虑时延作用的影响。文献[12]研究了具有丢包和输入和输出量化的不确定线性NCSs 的鲁棒稳定性问题,利用LMI 给出了具有范数有界不确定性的双量化闭环系统二次稳定性的充要条件,求得最粗对数量化密度,在该密度下,不确定被控对象可以通过量化状态反馈进行二次稳定。文献[13]研究了基于滑模观测器下含有时变时延的不确定网络系统的量化反馈控制问题,通过构造一个新的Lyapunov-Krasovskii 泛函使动态系统趋于稳定,但关于控制器的输入输出量化问题文献尚未考虑。
基于以上分析,本文针对一类具有时变时延的不确定网络量化反馈控制系统问题进行研究。考虑被控对象受不确定性和外部扰动输入的影响,为了提高控制系统性能,采用双量化模型,将存在于传感器到控制器和控制器到执行器的网络时延建模为连续时间状态的Markov 链,通过构造依赖于网络时延的量化反馈控制器,将NCSs建模为一个有限状态集合上的连续时间齐次Markov 跳变模型。然后采用改进Lyapunov-Krasovskii 泛函和矩阵不等式技术方法对不确定网络量化反馈控制系统进行H∞性能分析,并设计量化反馈控制器使系统具有随机稳定性且满足H∞性能指标γ。
2 问题描述
考虑如下不确定线性时不变连续系统:

式中,x(t)∈Rn是系统状态;u(t)∈Rm是控制输入;z(t)∈Rl是控制输出;w(t)∈Rp是外界扰动;Φ(t)是系统初始状态;A,B,D,D1是具有适当维数的常数矩阵,∆A,∆B是反应系统参数不确定性的时变矩阵,假设参数不确定性具有以下形式:

式 中,H ∈Rn×α;F(k)∈Rα×β是 一 个 满 足FT(t)F(t)≤I的时变矩阵;E1∈Rβ×n和E2∈Rβ×m分别是已知的适维常数矩阵。在如图1所示的NC⁃Ss中,被控对象、智能传感器、控制器与执行器通过公共网络进行连接。

图1 具有时延和量化的不确定网络控制系统
由于数据在网络传输中会产生时延,在图1中,τsa(t)表示传感器到控制器之间的网络时延,τca(t)表示控制器到执行器之间的网络时延。假设这些网络时延是随机时间变化的且具有Markov 特性,并分别将τsa(t),τca(t)记为τsa(η(t) ),τca(γ(t) )。其中,η(t)和γ(t)是连续时间离散状态Markov 随机过程,相应地有限状态集合分别为S1={1 ,2,…,N1} 和S2={1 ,2,…,N2} ,η(t)的转移概率矩阵表示为Π=(π1ij)∈RN1×N1,其定义为



式中,表示量化测量间隔,0 <ρj<1 是量化密度,量化密度越低,则量化越粗糙,量化密度越大,则量化结果越准确。量化器qj( ·) 将每个间隔映射为一个量化级数,其量化器qj( · )的函数表达式为

式中,v对应对数量化器的输入,qj(v)对应对数量化器的输出,σj为参数,且满足
根据Fu 和Xie[14]中提出的扇区界面表达式可以表示为

式中,不确定矩阵∆=diag{∆1, …, ∆m} 满足∆j∈[-σj,σj],j=1,2,…,m。
在NCSs中,状态反馈控制器表示为
式中,K表示反馈控制增益。
如图1 所示NCSs 中,采用两个式(3)的对数量化器f( · )和g( · )分别对状态信号和控制信号进行量化。传感器将采样信号x(tkh)传输给量化器f( · )后得到量化信号x͂(tkh),量化信号x͂(tkh)经过网络传输给控制器得到控制器输出信号u͂(t),控制器输出信号经过量化器g( · )和网络后得到控制输入信号u(t),结合式(5)得到如下表达式

图2 对数量化器
然后,结合式(5)和(6)得到

根据网络时延的描述,结合系统式(1)得到新的闭环控制系统,表示为
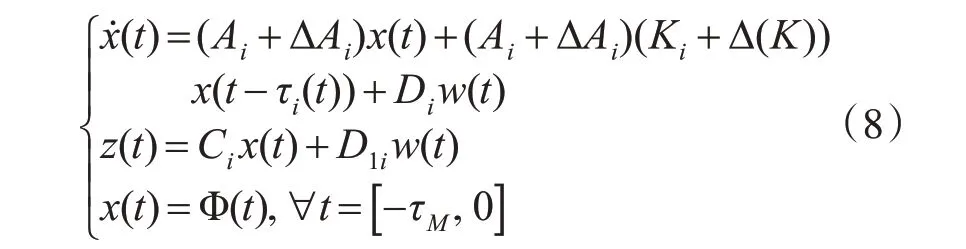
式中,∆(K)=∆gKi+∆fKi+∆gKi∆f。本文研究目的是针对具有Markov 特性的闭环控制系统(8),设计量化反馈控制增益Ki,从而使系统(8)是随机稳定的,并且满足H∞性能指标γ。
为了后面理论推导,做如下合理假设:
1)传感器采用周期为h的时间驱动,控制器和执行器采用事件驱动;
2)数据在经过网络传输过程中不发生数据丢包,仅考虑从传感器到控制器和控制器到执行器传输时延τsa(t)、τca(t);
3)被控对象的所有状态向量都是可测的。
3 主要结果
为证明本文的主要结论,首先给出以下引理。
引理1[15]:(Schur 补引理)假如存在矩阵S1、S2和S3,其 中>0 ,,则3<0 成立等价于

引理2[16]:给定对称矩阵Y,适当维数的矩阵H、V,对所有满足FT(t)F(t)≤I的时变矩阵F(t),如果Y+HF(t)V+VFT(t)HT<0,当且仅当存在β>0,使得Y+βHHT+β-1VTV<0 成立。
引 理3[17]:给 定 正 对 称 矩 阵M1∈Rn1×n1和M2∈Rn1×n1,对任意的标量γ>0,U>0,有如下不等式成立:

其中,α是n1维的列向量,β是n2维的列向量。
引 理4[18]:对 任 意 常 对 称 矩 阵M∈Rn×n,M>0,标量α>0,向量函数ξ:[0 ,α] →Rn,可以定义如下积分:

引理5[19]:给定对称矩阵Z0,Z1,半正定矩阵Z2≥0 和 向 量ξt,存 在 任 意α∈[α1,α2] ,有f(α1) <0 ,f(α2)<0 时 , 则 有 下 式f(α)=<0 成立。
引理6[20]:已知矩阵R>0,XT=X和任何标量ρ,有以下不等式成立:

3.1 H∞性能分析
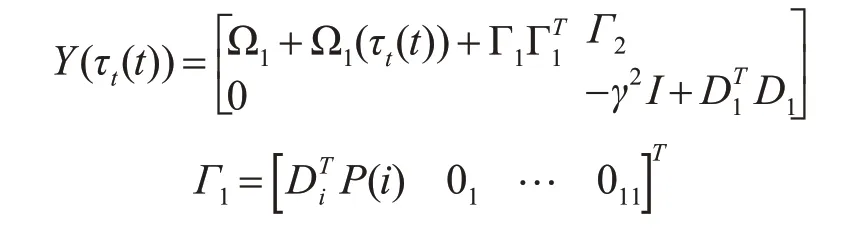
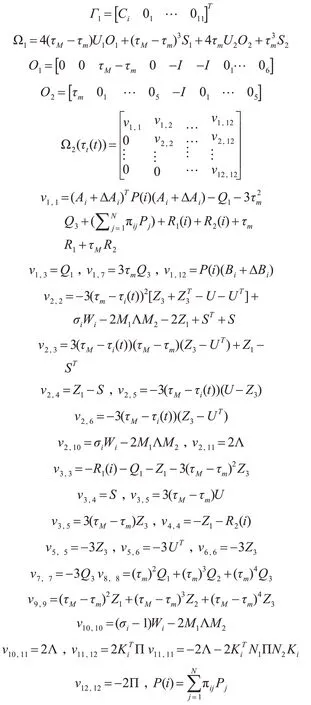
定理1:对于给定常数0 <τm<τM、γ>0、ρ1、ρ2和反馈控制增益Ki,如果存在对称正定矩阵P(i)>0,R1(i)>0,R2(i)>0,Wi>0(i∈S),Ql>0,Zl>0(l=1,2,3) ,Rn>0(n=1,2),适当维数的矩阵U,U1,U2,S,S1,S2适当维数的对角矩阵Λ >0,Π >0 和标量0 <σi<1使得以下LMI成立:

则闭环控制系统(8)是随机稳定的且满足H∞性能指标γ。
证明:对于闭环控制系统(8),构造如下的Ly⁃apunov-Krasovskii泛函为

沿着系统(8)的状态轨迹分别求取V1(t,i),V2(t,i),V3(t,i),V4(t,i)和V5(t,i)的弱无穷小算子,并记作ςV1(t,i),ςV2(t,i),ςV3(t,i),ςV4(t,i)和ςV5(t,i)。
然后利用引理3、4和6,可以得到如下
当w(t)=0 时,根据Schur 补引理和引理2,对于任意满足FT(t)F(t)≤I的不确定性项F(t),可以得到

综合上述引理3 和引理5,当同时满足条件{Y(τi(t))}τi(t)=τm<0 和{Y(τi(t))}τi(t)=τM<0 时,可以得到该结果保证了在零初始状态下的H∞性能指标‖z(t)‖2≤γ‖w(t)‖2成立。则当满足条件式(9)~(11)时,闭环控制系统(8)是随机稳定的,且满足H∞性能指标γ。
3.2 量化控制器设计
定理2:对于给定常数0 <τm<τM、γ>0 、ρ1、ρ2和反馈控制增益Ki,如果存在对称正定矩阵0 ,>0 ,(i)>0 ,0 ,>0(l=1,2,3) ,0(n=1,2) ,0 ,适当维数的矩阵,Yi(i∈s),适当维数的对角矩阵Λ͂>0,Π >0 和标量0 <σi<1 使得以下LMI成立:

则闭环控制系统(8)是随机稳定的,且满足H∞性能指标γ,状态反馈控制增益为Ki=。
证 明:令-2M1ΛM2+2Λ=2MΛM,-2N1ΠN2+2Π=2NΠN对式(9)~(11)进行合同变换。定义∆=diag,然 后 在(i,t))的两边同时分别乘以矩阵∆及其转置,同时令Yi=,通过结合引理1 和引理6,即可得到式(13)-(15)。 其 中,,是以一种非线性形式存在于式(13)中,通过定理1无法直接进行求解,应用常见的处理不确定项的方法,可以进行如下处理。由于Λ-1=通过结合引理6,可以得到不等式-Λ-1≤和-Π-1≤-2q2I。然后将不等式代入式(13)中,随后在方程(10)的两边同时左乘和右乘,即可得到͂,则当满足条件式(13)~(14)时,闭环控制系统(8)是随机稳定的,且满足H∞性能指标γ。证明完成。
4 仿真算例
为了验证文中所给出方法的有效性,下面给出相应的仿真算例。传感器是时间驱动的,以h=0.1s为周期对被控对象进行采样。考虑闭环控制系统(8),其参数矩阵如下:
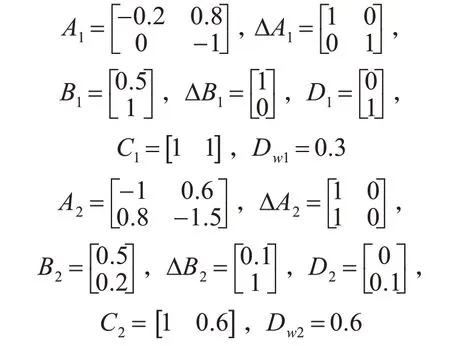
Markov状态转移概率矩阵为

系统的Markov 模态个数为2,网络时延下界τm=0.01,上界τM=0.06,系统状态的初始值为,考虑不同量化密度ρ1、ρ2对系统H∞性能指标γ的影响,取不同的量化密度ρ1=ρ2,得到系统H∞性能指标γ如表1 所示。因此,可以得到随着量化密度ρ1=ρ2的不断递减,H∞性能指标γ不断递增,量化越来越密集,量化反馈控制器的抗干扰性能越好。

表1 H∞性能指标γ 与量化密度ρ1、ρ2 的关系
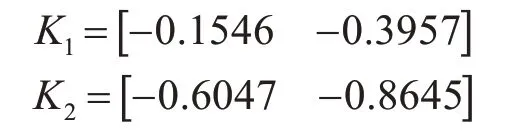
图3表示系统的Markov跳变,且系统的转移概率是已知的。图4 表示具有Markov 跳变系统的状态响应,从图可知,系统状态逐渐趋近于零,且具有随机稳定性。假设取量化器fj( · )和gj( · )的量化密度ρ1=ρ2=0.5,σ1=σ2=0.333,γ=0.624 ,在零初始条件下,即x0=[2 -2]T,外界干扰w(t)为高斯白噪声,根据定理2 可得相应的量化反馈控制器增益如下:

图3 模态r(t)
此时的状态曲线如同5 所示,说明系统随机稳定且具有很好的鲁棒性。
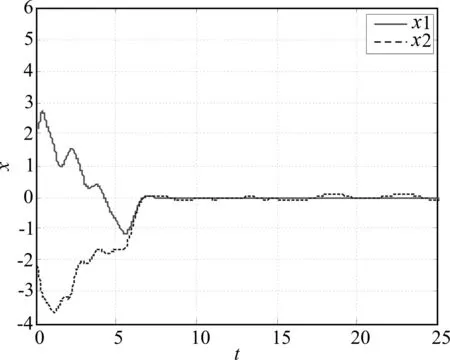
图4 系统的状态响应

图5 系统的状态响应(w( )t ≠0)
从以上结论可知,本文设计提出的量化反馈控制器是有效的,能够使系统(8)是随机稳定,并且满足H∞性能指标γ。
5 结语
本文主要研究了含有时变时延的不确定网络量化反馈系统的H∞控制问题,通过构造依赖于网络时延的量化反馈控制器,将NCSs 建模为一个基于有限状态Markov 链的连续时间跳变模型,通过构造一种新型包含二次项和积分项的Lyapu⁃nov-Krasovskii 泛函,利用Jensen 不等式消除了积分项,不需要求解Wirtinger不等式和自由加权矩阵来得到系统的随机稳定性且满足H∞性能指标γ的充分条件。随后利用二次凸技术、增广状态向量和随机切换系统理论来得到量化反馈控制器的设计方法。最后,给出了一个数值仿真来证明该方法的有效性。