人形机器人步态实验的设计与实现∗
2020-11-02高丽彭熙刘明
高 丽 彭 熙 刘 明
(1.华中师范大学计算机学院 武汉 430079)(2.湖北省高等学校计算机基础实验教学示范中心 武汉 430079)(3.湖北省人工智能与智慧学习重点实验室 武汉 430079)
1 引言
近年来,人形机器人已经成为机器人研究的一个热点。人形机器人的步态控制一直是人形机器人研究的一个难点[1~3]。目前国内外高校的机器人实验一般结合自己的专业来开设,其中技术能力较弱的学校只开设机器人动作演示、机器人组装实验,研究能力较强的学校则开设机器人控制等实验项目[4~6]。
仿人机器人具有与人类相似的躯干结构与运动能力,能够在人类的工作环境中替代人类进行工作,将人类从体力劳动、机械重复作业等低级劳动以及高危、高风险行业中解放出来,提高生产力水平和工作效率,提升人类的生活质量,使人类能够专注于高级智慧活动,促进生产力的合理配置和社会发展[7~9]。
目前人形机器人大多只存在于实验室里。要想让机器人走出实验室,进入人们的日常生活,代替人们完成日常工作。必须要让机器人适应外界复杂的环境。机器人在行走过程中,如何应对复杂的路面化境就是亟待解决的问题之一。人形机器人的行走步态是机器人研究的一个重要领域。
2 系统设计
要想让机器人完成对复杂路面的适应,最重要的两项技术就是——机器人姿态控制以及机器人步态规划。姿态控制包括让机器人知道自己目前所朝方向,是否需要转弯,是否倾斜等等,以此为基础机器人才能做出调整,让自己身体保持平衡,进而才能迈步行走,如何迈步行走即是步态规划技术要考虑的问题。
要想使机器人能够感知自身姿态,就需要两个部分。一是要有能接受外界信息的硬件设施,另一个就是在收集到外界信息后要结合算法进行解算。
2.1 硬件的选取
姿态信息收集的传感器,一般为惯性传感器。例如三轴加速度传感器、陀螺仪等等。某个单一的惯性传感器是很难将机器人的姿态描述清楚的,所以需要多种传感器配合。本实验选取JY901 姿态角度传感器,选取的是集成高精度的陀螺仪、加速度计以及地磁场传感器,协同工作收集姿态信息,传递给控制板进行解算。图1所示。

图1 连接示意图
2.2 姿态解算原理
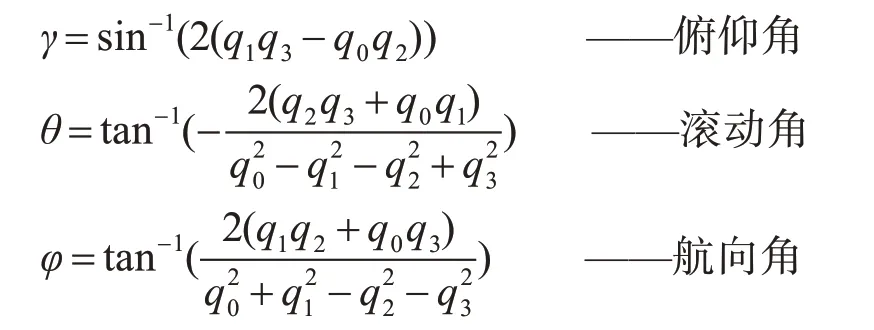
对于机器人姿态的计算是利用惯性传感器所传回的四元数信息,计算欧拉角。其计算原理及公式如下:
四元数是一个简单的超复数,在三维中的旋转可以用单位四元数来描述。四元数的定义为Q=a+=q0+q1i+q2j+q3k。MPU6050 一类惯性传感器,可直接输出四元数,我们则利用四元数进一步求出欧拉角。
欧拉角是指在一个固连于刚体的坐标系中,由刚体的旋转分别产生俯仰角、滚动角、航向角组成的一组独立角参量。
首先,我们需要使用四元数表示的旋转矩阵,根据公式可知:

已知求只需做一次矩阵逆变换便可求出:


对比两式可解出
通过四元数计算出欧拉角即可直观反映出机器人姿态。
硬件收集信息+算法解算,就可以得到机器人的姿态数据,完成机器人姿态的控制。
3 人形机器人步态设计实验效果
3.1 人形机器人步态自由度的设置
设计人形机器人的步态,使其能够在平地上完成所有的行走过程,实现前行、后退、转弯等动作。本文设计出的机器人腿部共有12 个自由度,每条腿各6个,即踝关节前向和扭转2个自由度,膝关节前向1个自由度,髋关节有前向、侧向旋转和转向3个自由度,共有18个自由度[10~12]。自由度的设置如图2所示。

图2 机器人CCNU-1自由度配置示意图
3.2 人形机器人连续步态的设计
根据机器人的步态设计要点,我们可以规划出所设计的人形机器人的运动过程和行走步骤。
首先将机器人站立,使其重心垂直于与地面,然后假设先以右脚支撑,迈左腿,这样可以将机器人的重心转移到右腿。要实现这一目的,应该拖动软件中的13号舵机模块的滚动条(如图3所示),使机器人的重心右移,其效果如图4所示。

图3 编程软件中的第13号舵机模块

图4 机器人重心右移后的效果图
根据惯性传感器所传回的四元数信息,计算出机器当前俯仰角、滚动角、航向角。对角度数值加以判断,归纳当前姿态情况,并根据不同情况做出不同反应。若已符合目标姿态,停止姿态调整,保持姿态不动;若未符合目标条件,则做出相应调整策略。完成调整后,循环程序,再次收集姿态信息加以判断[13~15]。程序设计流程图如图5所示。
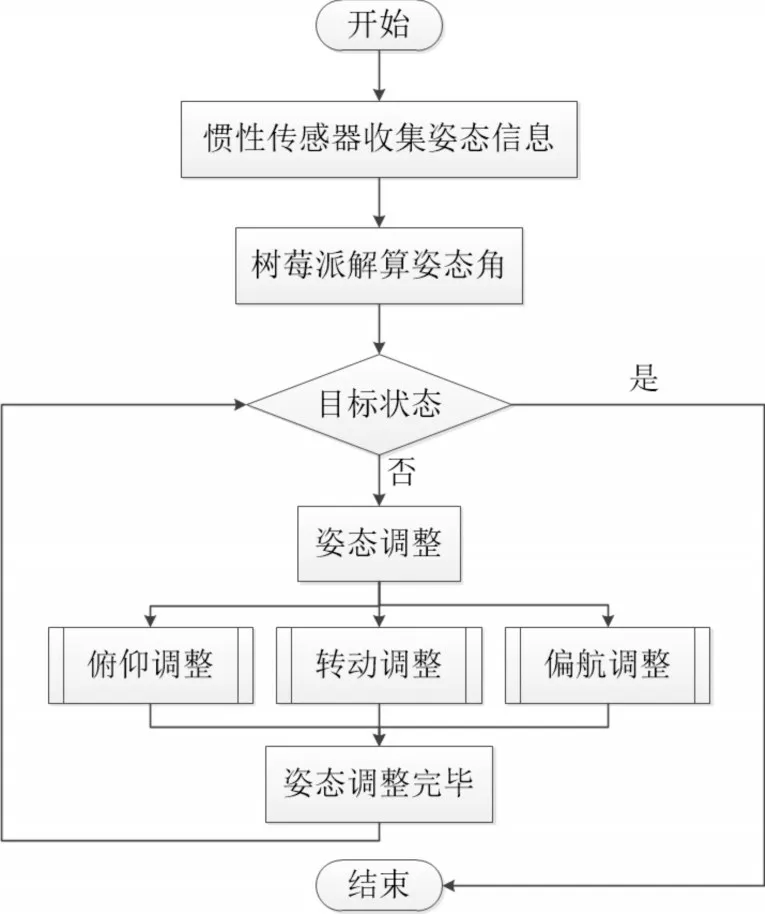
图5 程序设计流程图
根据流程图,机器人动作姿态的变化,由各个舵机的控制来完成。如表1 所示。

表1 人形机器人动作控制
根据姿态解算结果,向机器人舵机控制系统发出相应信号,机器人做出相应动作,调整姿态,即达到连续步态的效果。图6 所示为机器人连续步态过程的分阶段图解。

图6 人形机器人的连续步态示意图
4 结语
利用惯性传感器所传回的四元数信息,计算欧拉角,控制人形机器人的各种姿态。在自己设计机器人模型的基础上,掌握人形机器人步态设计的基本要领和步态技巧以及工作原理。提高了学生综合分析能力和解决问题的能力,本文设计的方案和计算方法,经过实验教学的应用和检验,验证了该方法的有效性、可靠性和稳定性,取得了良好的效果。这一实践环节大大提高了学生的就业质量,培养了更多的实践创新人才。