移动机械臂倾覆稳定性分析与优化∗
2020-11-02郭永凤
郭永凤
(陕西国防工业职业技术学院 西安 710300)
1 引言
传统机械臂的工作空间较为有限,机械臂需要借助螺栓等组件固定在地面上。为了扩大机械臂的应用范围,提高其应用性能,近年来,移动机械臂(Mobile Manipulator)逐渐兴起。移动机械臂将机械臂与移动机器人相结合,极大地增加了机械臂的自由度,使其能够灵活位移,机械臂的操作性能也得到了提升[1~2]。
在2012 年,Aalborg 大学的学者Simon Bogh 对自主工业移动机械臂的潜在应用市场进行了统计与分析。对物流业、服务业等行业中的500 余任务进行了AIMM 的应用预期统计。结果显示:在未来,机械臂可以顺利完成超过半数的任务。自主工业移动机械臂适用于物流运输、协助装配、机械管理、清洁维护等领域,尤其是在物流行业,移动机械臂有极大优越性,因此它是一个重要的技术发展方向[3]。
关于机械臂对移动平台的力/力矩及其对系统造成的影响这一方面,目前尚缺乏研究成果。机械臂与移动平台之间的力学规律较为复杂,影响因素众多,如机械臂的机械构型,机械臂所连接的负载,关节的角速度与角加速度。移动平台的力/力矩可能产生系统倾覆。倾覆是指对于竖直方向的轮式移动机械臂,其绕倾覆轴线产生向外旋转,致使系统失控,严重时,系统可能翻倒。
在工程实践中,对于部分机器人,如腿式移动机器人以及履带式机器人,研究其倾覆稳定性是一个主要课题。对于移动机械臂而言,这一问题同样不可忽视。保障轮式移动机械臂不发生倾覆与侧滑是机械臂操纵的基本前提,也是重要的安全问题。国内外有较多关于移动机器人倾覆问题与滑移问题的研究,但研究机械臂的动力学因素对系统倾覆影响的研究较少。本文重点研究这一方面,分析机械臂与移动平台之间的力/力矩,探究其动力学因素与影响机理。
2 倾覆稳定性判别
对系统做出以下假设:1)轮式移动机械臂所放置的地面为平面,不考虑地形的起伏情况;2)轮与地面之间的接触为点接触,且忽略滚轮的变形情况[4];3)系统为刚性结构,机械臂的关节、连杆与轮式移动平台均为刚性。
在通常的研究中,判断倾覆稳定性的方法是提出一种标识作为倾覆稳定性判据,但该方法无法描述倾覆的动力源的本质。因此本文提出一种新的稳定性判别方法,用倾覆力矩来定量描述倾覆过程。倾覆力矩为造成系统倾覆的力矩,是系统倾覆的根源。
图1是系统中移动平台上的力/力矩示意图,其中椭圆为整个移动平台,包含滚轮在内。Op为平台的重心,并且是平台的中心位置。以Op为原点建立平台的基坐标系{XP,YP,ZP}。gp为包含滚轮在内的整个平台所受到的重力,mp表示整个平台的质量。机械臂的一端刚性安装在OM点,其质量为mr,同时在该点建立机械臂的基坐标系{XM,YM,ZM}。移动平台上的其余附件的安装在OA点处,其所受到的重力矢量为gA,质量为ma。
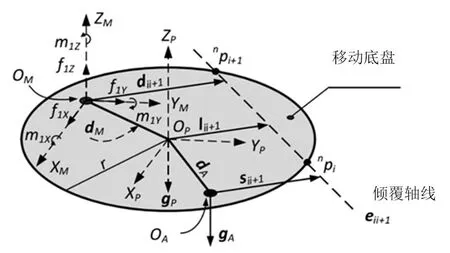
图1 移动平台上的力/力矩示意图
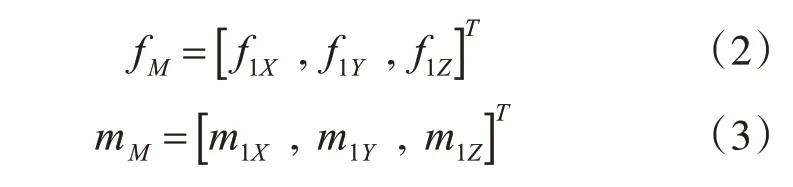
假设机械臂关节上的约束力/力矩为w1,相应的机械臂对移动平台的力/力矩为-w1:

此力/力矩可沿坐标轴X、Y、Z三个方向分解:
移动平台的下方安装滚轮,滚轮与地面形成点接触,所有接触点形成一个凸包多边形。多边形的每两个相邻顶点为一条倾覆轴线。移动机械臂的倾覆只会沿倾覆轴线发生[5]。
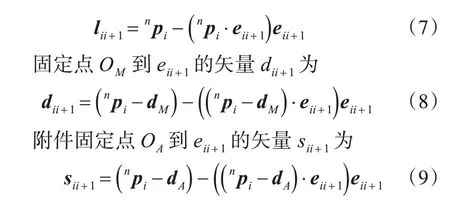
假设其中的两个相邻顶点为npi与npi+1,这两点构成的倾覆轴线为eii+1。移动平台基坐标系原点OP到机械臂的基坐标系原点OM的矢量为dM,相应的从点OP到其余附件安装点OA的矢量为dA。从原点OM到倾覆轴线eii+1的正交矢量为dii+1,从原点OP到倾覆轴线eii+1的正交矢量为lii+1,从原点OA到倾覆轴线eii+1的正交矢量为sii+1。根据图1,移动机械臂系统的倾覆力矩TOM(Tip-Over Moment)可由式(4)求得:

对于式(4),公式右侧第一项表示机械臂对移动平台的转矩在倾覆轴线上的投影,第二项表示机械臂对移动平台的力在倾覆轴线上的力矩,第三项表示移动平台的重力在倾覆轴线上的力矩,第四项表示附件的重力在倾覆轴线上的力矩。
若轮—地接触点形成的凸包多边形含有的顶点个数为n,则倾覆轴线存在n条,因此TOM 数也为n。对于这n个系统倾覆力矩,其中的最大值为TOMmax,对应此值的倾覆轴线承受最大倾覆力矩。系统稳定的条件为TOMmax≤0,此时没有倾覆力矩。而若TOMmax>0,系统将发生倾覆,此时系统不稳定。当TOMmax≤0 ,|TOM|为倾覆裕度(Tip-Over Margin)。倾覆裕度表征系统的稳定状况,|TOM|越大,系统距倾覆越远;|TOM|越小,系统距倾覆越近。式(4)要包含所有倾覆轴线。
如下介绍两类移动机械臂。第一类型是静态不稳定的移动机械臂,如移动机械臂Ballbot,由卡梅隆大学研制而成,此移动平台仅有一个滚轮(球),其上有一对机械臂,自由度都为2。Ballbot采取两个闭环控制其稳定性,包括内部闭环与外部闭环。内部闭环采用PI 控制,可改变球的速度。外部闭环则利用线性二次型调节器实现全状态反馈控制[6]。两轮移动平台适用于斜坡、窄路等环境,具有很高的移动性能[7]。乔治亚理工学院研制的Segway RMP200 采用PD 控制达到动态稳定[8]。在Segway RMP200 移动平台上,研究者装置了一台KUKA Light Weight Robot[9]。由马萨诸塞大学研制的u Bot-5则采用LQR控制器实现系统在运行过程中的稳定性[10]。
第二类型的移动机械臂为静态稳定的移动机械臂。如Neobotix MM500移动机械臂,含有三个滚轮,用于增广现实领域的研究。KUKA omni Rob 移动机械臂含有四个全向轮。Little Helper 移动机械臂则有五轮。此类机械臂在静态时可以达到稳定,但易发生系统倾覆。
在滚轮数量确定的情况下,滚轮有不同的安装位置方案。本文以轮—地接触点形成的凸包多边形是等边三角形的情况进行讨论,结构如图2 所示。

图2 等边三角形滚轮分布
图2 中,为使设置不失一般性,取原点OP与np1的连线方向为XP轴正方向,其中np1为第一个滚轮与地面的接触点。r为凸包多变形外接圆的半径,由正弦定理,可得所有轮—地接触点的坐标:
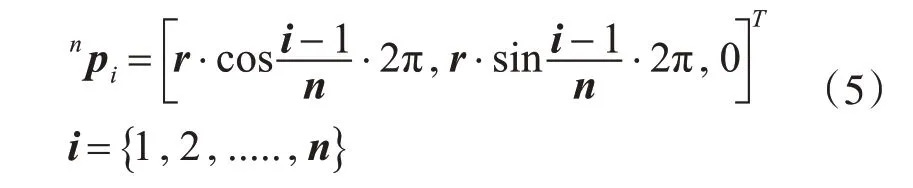
npi表示第i个接触点。由所有相邻点,可求得倾覆轴线,其单位矢量为

当i等于n时,i+1 则等于1,即最末接触点与起始接触点的倾覆轴线单位矢量,以下公式相同。原点OP到eii+1的矢量lii+1为
3 TOM 与ZMP 对比分析
接下来通过分析对比TOM和ZMP来验证TOM判据的正确性。移动平台相关实验参数如表1。
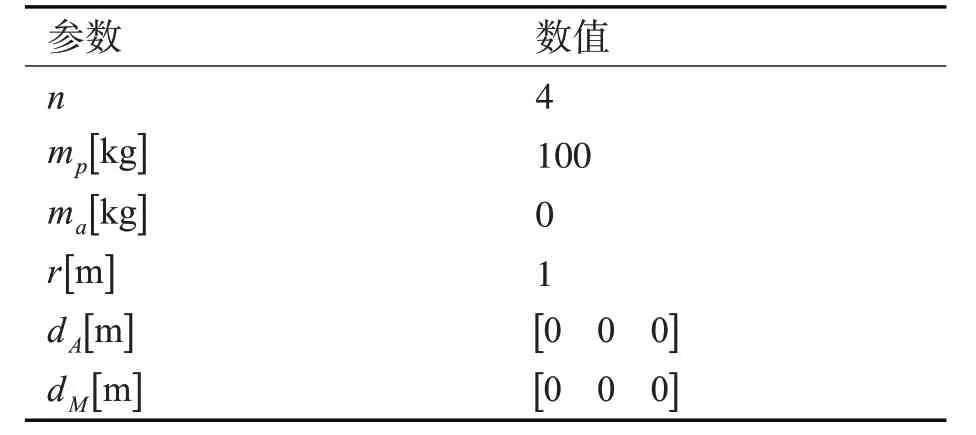
表1 移动平台参数假定
实验过程如下:求出TOM判据和ZMP判据在系统静态、受力平衡静止状态和动态情况下得到的结果。然后合并显示两种结果,进行对比分析。
对机械臂的每种杆件构型计算此时的TOM值和ZMP值,结果显示在图3。

图3 TOM与ZMP的对比仿真结果
其中,外侧的黑色框线指的是移动平台的倾覆轴线,黑色框线内部区域即是凸包多边形。
图3(a)中,点的位置表示通过ZMP判据获得的系统零转矩点,颜色反映TOM判据的计算结果的大小,大致范围在右侧标尺标出。由图像可知,ZMP判据求得的点均位于凸包多边形内侧,即系统始终稳定,对应的所有TOM值均为负。ZMP点从凸包多边形内部靠近边界框线时,图像颜色变红,TOM值增大,即倾覆裕度减小;反之,远离边界时,TOM值减小,倾覆裕度增大。为进一步验证TOM判据的正确性,保持ZMP计算结果不变,对TOM值进行根据符号的二值化处理,结果如图3(b)、图3(a)中颜色对应TOM值符号的正负,图中红色区域,TOM值取正时,系统倾覆;图中绿色区域,TOM值取负值,系统稳定。图3(b)中,凸包多边形内的所有点TOM值均为负。因此,在判定系统是否倾覆的问题上,两种判据得到的结论是一致的,但TOM值还能额外反映系统的倾覆裕度。
4 系统倾覆稳定性分析
机械臂逆解会产生多种可能,此处将机械臂关节空间离散化,即对三个关节的关节角按一定的分辨率(本文选择分辨率为6°)来离散化得到一系列杆件构型,用杆件构型的合集反映整个工作空间。假设移动平台为静止状态或在匀速运动,忽略加速度对系统动力学的影响。
分析表1 列出的参数,根据参数可将式(4)简化成如下形式:

mMX和mMY是机械臂作用于平台的力/力矩-w1在XM与YM两个方向上的力矩分量;fMZ是-w1在ZM方向上的力的分量;gpz是平台重力矢量gp在ZM方向上的分量。
利用mMX与mMY取绝对值,可得二者共同作用下的倾覆效用最大的倾覆轴线上的倾覆力矩。优化后的式(10)(仅用于本节的仿真计算)减少了TOM值的计算次数,其值仅为式(4)的1/4,由此可见,式(10)有效提高了计算机仿真的效率。
通过TOMmax的值可以判断系统是否会发生倾覆,如 果TOMmax>0 ,系 统 会 倾 覆;反 之,TOMmax≤0,系统是稳定的。之后,可根据mMX与mMY的正负符号判断系统发生倾覆的旋转轴,方法如图4 所示。TOMmax>0,若mMX>0 且mMY>0,mMX和mMY的合力矩使系统绕着倾覆轴线4 发生旋转,因此系统将绕轴4 发生倾覆。倾覆旋转轴的判断方法总结如下表(表2)。
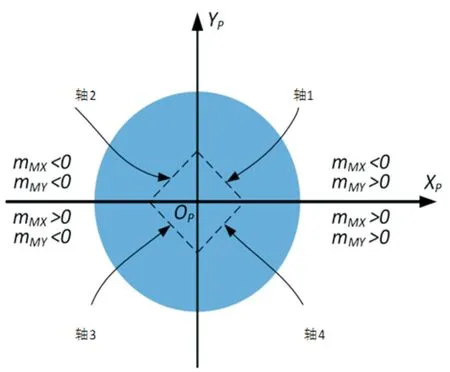
图4 倾覆轴线的识别

表2 TOMmax >0 情况下系统倾覆的旋转轴判断
约束力矢量来自于三个连杆的质量(如图5),即:m3g,m2g和m1g,方向竖直向下,连杆质量同样是引起约束力矩矢量的因素。例如对第三杆进行分析,XM和YM方向上的力矩就取决于与其重心的水平位置p3XC和p3YC。保持连杆质量不变,fMZ不变,根据上述简化的式(10),则TOMmax值取决于m1X与m1Y,而m1X与m1Y转矩分量由连杆重心的水平位置决定。由末端负载引起的约束力/力矩swp1也可类似确定。

图5 静态情况下移动机械臂的力/力矩
5 基于倾覆稳定性约束的最短时间轨迹规划试验与结果
本节基于飞机(火箭)的蒙皮铆接工艺需求,分析移动平台匀速运动时系统倾覆性情况。此时机械臂的关节角、关节角速度和关节角加速度都在不断变化,系统的TOM值随之改变,因此,机械臂的轨迹规划需要以实现TOM值小于零为目标,即系统稳定性为目标。

图6 飞机/火箭蒙皮铆接作业的点与路径

图7 自适应时间段轨迹规划与TOM 结果
在飞机/火箭蒙皮铆接工艺中,机械臂的末端点路径规划如下(如图6 所示):起始点→1→2→1→3→4→3→5→6→5→7→8→7→9→10→9→11→12→11→起始点。其中,在第一次到达点1、3、5、7、9、11时进行加工预备,在点2、4、6、8、10、12上进行钻铆加工,此时机械臂将承受铆接作业的加工反力。
图7 显示的是依据自适应时间段轨迹规划得到的规划与TOM的计算结果。整个路径上的最大TOM值为-137.5Nm,即通过这种方法得到的规划能够保证系统全程保持稳定。不考虑打铆工序的情况下,自适应时间段轨迹规划方法使总移动时间为8s,比固定时间段轨迹规划移动时间增加了0.4s,保证了系统稳定性,保障了系统高效性。
6 结语
本文分析了传统移动机械臂颠覆不稳定的问题,提出了比较合理的优化方法,通过对关节角速度、关节角加速度等主要影响因素的规律分析,给出了合理的轨道规划方法。通过试验数据分析,结果表明:系统可以稳定运行,且整体运行时间最短,不易颠覆。