智能水滴算法结合神经网络的路径跟踪研究∗
2020-11-02郭永强李丽娜
郭永强 李丽娜
(1.贵州健康职业学院 铜仁 554300)(2.辽宁大学物理学院 沈阳 110036)
1 引言
路径跟踪是机器人研究方向的一个重点方向,机器人的路径跟踪研究是在确定的路径下控制机器人沿着已知路径完成由起点到终点的动作达到预期目标[1~4]。路径跟踪算法的典型控制算法有PID 控制,反推控制(Back-Stepping),滑膜控制,智能控制(NN-neural networks,FL-fuzzy logic)算法等。目前对于这几种跟踪算法的研究已经相对成熟[5~7],但是通过算法的改进,跟踪的性能还能进一步提高,
本文将经典PID 控制算法于CMAC 算法相结合的并行控制结构,引入新的智能控制算法-智能水滴算法[8~9],PID 和CMAC 算法结构简单,算法容易实现;但是算法的寻优效果不理想,而智能水滴算法简洁,编程简单而且寻优效果好,本文将此结合起来,进一步提升整体结构的寻优效果,控制模型建立后,控制的性能得到很大提升。为机器人实验平台的验证做了安全保障,本文的最后结果运用实验平台验证,收到了良好的效果。
2 路径跟踪算法原理
2.1 智能水滴算法原理
智能水滴算法是研究人员通过观察自然界河流的流向归纳总结而建立的数学模型,该模型的水滴描述主要有两个重要的指标:速度与泥土含量。智能水滴算法的性能取决于这两个重要指标,初始起点,智能水滴的速度和泥土含量均为零,智能水滴在由起始点运动到终点的过程中与河流的环境相互作用具有能量和物质的交换,智能水滴从而获得速度和泥土杂质,并且泥土杂质的增加或者减少是非线性的,另一方面智能水滴的速度跟杂质的含量密切相关,也是非线性的。在较短的运动距离时,水滴可以看成直线运动,水滴的时间移动的距离成反比[11~12],与速度成正比,因此,该特征表明智能水滴会选择泥土较少的路径,本文将智能水滴算法结合小脑模型神经网络与PID 复合控制结构综合应用[13]。
2.2 IWD改进CMAC-PID复合控制算法
经典的CMAC-PID 复合控制器的学习算法是梯度下降法,梯度下降法的不足在于收敛速度慢,在求解效果相同的情况下迭代次数多,这就限制了算法的性能,而智能水滴算法的特点在于:算法简单,求解速度快,并且多峰寻优效果好。将智能水滴算法结合实时性和稳定性抢的CMAC-PID 复合控制系统能够极大地改善控制系统的性能,改进后的控制结构如图1 所示,智能水滴算法的主要作用在于指导CMAC神经网络的学习算法,来提高控制系统的整体性能。

图1 智能水滴算法融入CMAC-PID复合控制结构
CMAC-PID 复合控制器融入智能水滴算法的具体步骤如下。
智能水滴算法要解决的是函数求解的优化。

f(k)作为评价函数,智能水滴算法根据f(k)求解最优值,此时函数值最小,泥土含量用1/f(k)表示,即小路径范围内路径上的泥土分布是均匀的。智能水滴的评价函数数值大表明该路径上泥土含量越少,该路径就容易被选择。
智能水滴算法速度为f(k),即f(k)越大速度越大时间time(i,j,vel)越短,走过同路程时泥土量soilIWD越多。
最终更新所有路径上的泥土含量:

求解到值满足Emin(k)的最优解,在求解最优解的过程中f(k)越来越小,泥土含量变大,智能水滴运动越慢,最后能够求解全局最优解。
智能水滴融入到CMAC-PID 复合控制器后的结构具有经典的CMAC-PID 复合控制系统的结构和算法特点,同时IWD 算法增强了神经网络的学习效率,智能水滴算法学习算法的收敛性,使得综合算法的性能得到极大的提升。
3 两轮机器人的控制模型
两轮模型是依标准两轮差动模型建立的,两轮差动模型的位置姿态图如图2所示[4~5]。
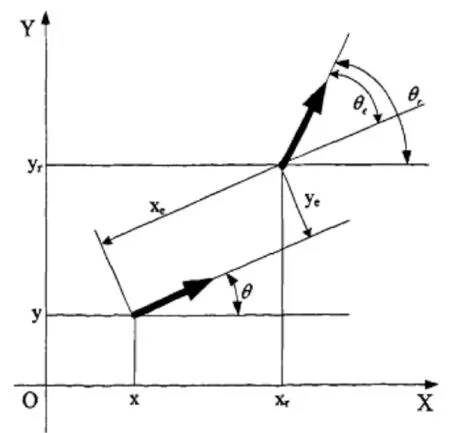
图2 机器人位置姿态图
机器人在实际环境的二维平面坐标(x,y),机器人纵向运动速度v,机器人在平面环境中转动的角速度ω,θ是机器人行进方向与X 轴的夹角(即方向角)。机器人的位置(x,y,θ)与姿态(v,ω)由上图解得在机器人坐标系下的位置姿态误差经过Lyapunov函数的处理有控制规律:

式中C1,C2是常数。
两轮机器人路径跟踪控制器建模:机器人的路径确定之后,给定期望控制输入v和ω,经过传感器实时确定位姿(x,y,θ),对比期望位姿与实际位姿求得地理坐标偏差,变换至机器人坐标系(x轴在纵向,机器人中心垂直向左为y 轴)。经过控制核心计算控制输入v和ω,调节机器姿态到期望位姿。
经过变换机器人坐标系中的偏差为

期望位姿(xd,yd,θd),机器人位姿(xr,yr,θr),实际位姿偏差(xd-xr,yd-yr,θd-θr)。
经过分析建立的控制器模型结构图如图3。

图3 控制系统结构图
4 路径跟踪仿真实验
本次仿真实验验证IWD 算法改进CMAC-PID控制算法实现机器人路径跟踪的可行性,主要对比了常规PID 与CMAC-PID 对比仿真。仿真实验中轮式机器人参数如下:轮子半径0.035,轮距0.15,前万向轮到两车轮中心间距0.13,本次方针主要因此本次仿真主要针对直线路径和曲线路径真。
1)线性路径跟踪控制仿真
路径为如图4 所示的线性路径,通过实验选取PID 控 制 参 数 为kp=25 ,ki=0 ,kd=0.28 ,CMAC-PID 及IWD 改进CMAC-PID 路径跟踪控如图4 所示,图4 中子图(b)和(d)详细列出控制路径跟踪位姿误差曲线。
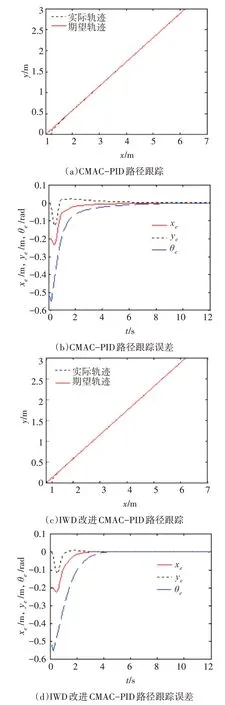
图4 线性路径跟踪及误差图
计算仿真结果的量化分析如表1。
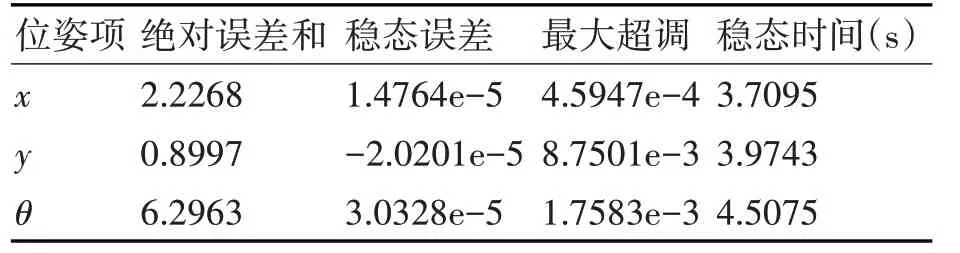
表1 IWD改进CMAC-PID线性路径跟踪
跟踪直线路径是常规PID,CMAC-PID,IWD 改进CMAC-PID 的绝对误差,稳态误差,最大超调量和稳态调整时间顺序依次减小,主要是CMAC-PID比PID 的增加了CMAC 的前馈的逆动态过程,见效了调整时间;而IWD 改进了CMAC 的学习过程,因为IWD 算法的寻优策略由于梯度下降法,加快了CMAC 的学习进程,所以使得调整时间和跟踪效果没明显增强。
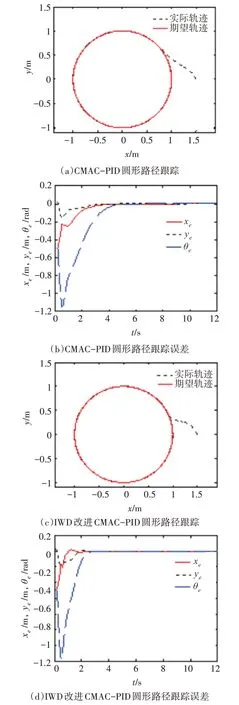
图5 圆弧路径跟踪控制及误差
2)圆弧形路径跟踪仿真
以上实验表明CMAC-PID 的复合控制器好于常规PID 算法,所以以下仿真仿真仅对比CMACPID 复合控制和IWD 改进CMAC-PID 控制,PID 初始值:kp=50,ki=0,kd=10 结果如5 所示,量结果见表2和表3。
本文的圆形路径跟踪性能评价较少,主要表现在从起点到跟踪轨迹上的过渡之间也就是稳态时间,以及过渡过程中的绝对误差和,结果说明IWD改进后的CMAC-PID 算法,其稳态时间减少,误差和相对减小,说明本文改进算法有一定的优势,因此直线跟踪和圆弧路径跟踪本文算法的鲁棒性较好。

表2 IWD改进CMAC-PID复合控制圆弧路径跟踪结果
5 实验验证
为了验证本文算法的实际应用效果,本文最后将算法应用于两轮机器人控制平台,本平台是STM32 搭建的简易控制平台[14~15],两轮机器人集成了无线传输模块[16],定位模块,陀螺仪模块等。
实际路径有三条路径,实际测量路径数据,CMAC-PID 控制轨迹跟踪数据图,以及IWDCMAC-PID 路径跟踪数据图,三条路径的详细数据已显示,以下量化分析了其路径总长度误差和误差的平方根,详细如表3所示。
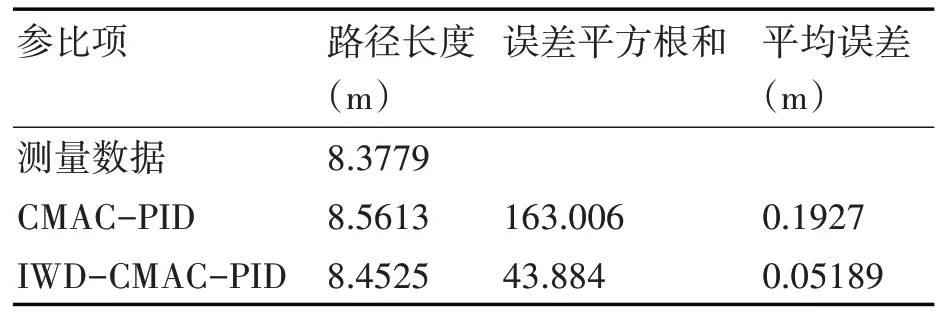
表3 实际路径跟踪结果分析
表中:测量数据是由规划算法找到的最优解实际数据,CMAC-PID 路径长度表示CMAC-PID 路径跟踪采集的数据,误差0.1834m,IWD-CMAC-PID路径长度是IWD-CMAC-PID 路径跟踪的数据,误差为0.0746m,根据实验结果可知改进算法后路径跟踪的效果有所提高,同时误差平方和表明改进后的算法跟踪性能更稳定,平均误差明显减小,因此表明IWD-CMAC-PID 控制算法较CMAC-PID,经典PID算法具有一定的优越性。
6 结语
本文应用IWD 算法改进CMAC-PID 算法实现了路径跟踪,但是依据实现来讲还是借助于上位机来实现算法,目前还未实现嵌入式系统的移植,实现本功能以嵌入式移动平台的自由运动。同时本实验没有考虑动态障碍物的避障,因此影响了移动机器人的实时性能,后期还有很多研究工作。