自抗扰控制器在舞台设备远程监控系统中的应用∗
2020-11-02骆鹤松沈汉林武晓峰
骆鹤松 沈汉林 武晓峰
(1.兰州理工大学技术工程学院 兰州 730050)(2.兰州理工大学电气工程与信息工程学院 兰州 730050)(3.陕西黄河集团有限公司 西安 710032)
1 引言
随着科技的发展,国家的强盛,人们对文化追求和生活质量有了更高的要求,现代舞台设备越来越多,舞台设备的控制越来越复杂。舞台设备主要包括:舞台吊杆、舞台防火幕、大幕、假台口、灯光吊笼、银幕架、二道幕机、单点吊机和飞行机构等[1~2],这些设备主要是通过电机控制。而传统的舞台控制系统应用PID 控制器,该控制器结构简单、稳定性好、整定方便,是模拟控制系统中技术最成熟、应用最为广泛的一种控制方式。但舞台设备控制系统是一个非线性、时变复杂系统,在这种情况下PID 控制的效果不理想,出现了控制精度不高,调节时间过长,超调过大等问题,轻则影响舞台演出效果,重则出现舞台事故,甚至危机到生命安全。自抗扰控制[3~7]是韩京清结合现代控制理论和经典调节理论提出的一种控制方法,采取了PID 基于误差反馈控制的核心理念。在系统大误差产生之前就通过输入输出信号经扩张状态观测器将造成误差的“总扰”信息提取出来,并据此对控制信号进行实时补偿[8~10],相比传统的PID 控制器“基于误差消除误差”,基于自抗扰控制器的系统有更好的鲁棒性和抗扰性。因此将自抗扰控制器引入到舞台设备远程控制系统中,对于提高舞台设备控制精度和对舞台安全方面具有重要意义。
2 系统功能结构
2.1 系统总体结构
系统的总体结构分为三层,包括设备层、数据传输层、应用层。设备层主要包括PLC、各种舞台设备以及速度传感器等;数据传输层包括从设备到本地监控计算机、从本地监控计算机到各服务器和数据库以及从Web 服务器到Web 浏览器的数据传输。系统总体结构见图1。
2.2 系统硬件构成
舞台设备的系统硬件部分主要是由工控机IPC+PLC+变频器+交流电机等组成,系统以PLC 作为主站,通过基于以太网的FROFINET 与上位机之间通信,从站变频器通过FROFIBUS-DP 与现场设备通信,系统硬件结构图如图2所示。
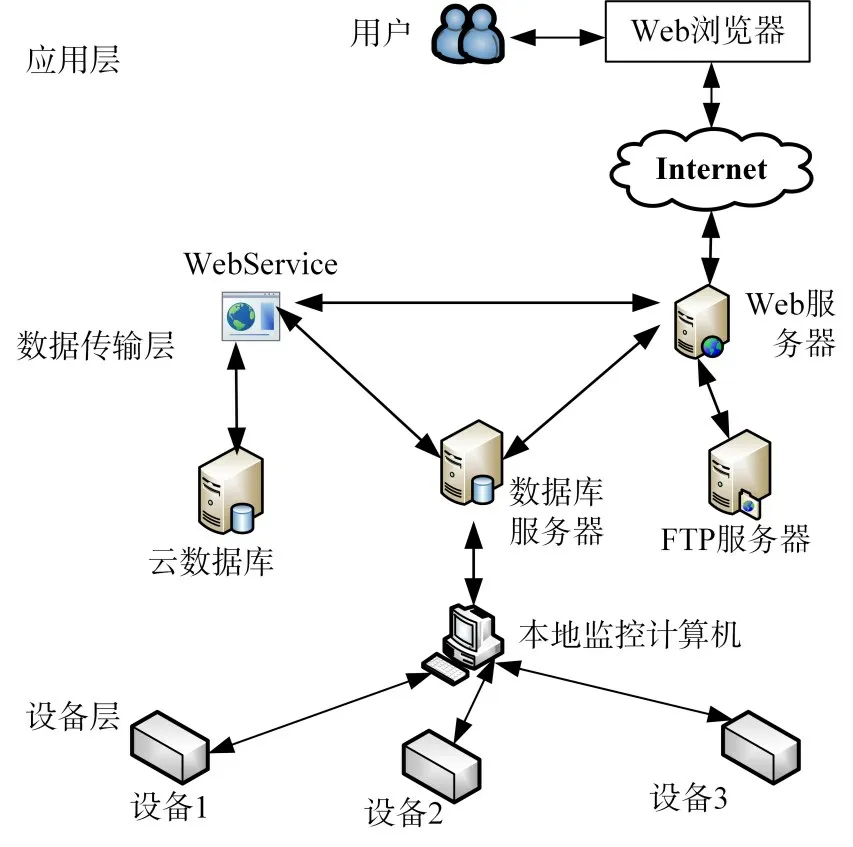
图1 系统总体结构
主站通过FROFINET 接收来自工控机下发的控制指令,并通过PROFIBUS-DP 总线将控制指令下发给系统从站(变频器),最后由变频器对交流电机进行驱动控制,从而来控制舞台设备的运行。安装在制动装置上的多圈绝对值编码器与增量型旋转编码器通过检测位置和速度信息并将信息反馈给系统主站,然后通过计算并与目标位置和速度比较,进一步对变频器下发控制指令,这样就形成了一个双闭环的控制系统。
PLC 选用的是西门子公司新型的SIMATIC S7-1500系列CPU1517-3 PN/DP(6ES7 517-3AP00-0AB0),西门子S7-1500 采用模块化结构,有良好的扩展性,处理速度高达12MBit/sμs,程序容量4MB,数据容量12MB,能够满足系统的实时性控制要求。
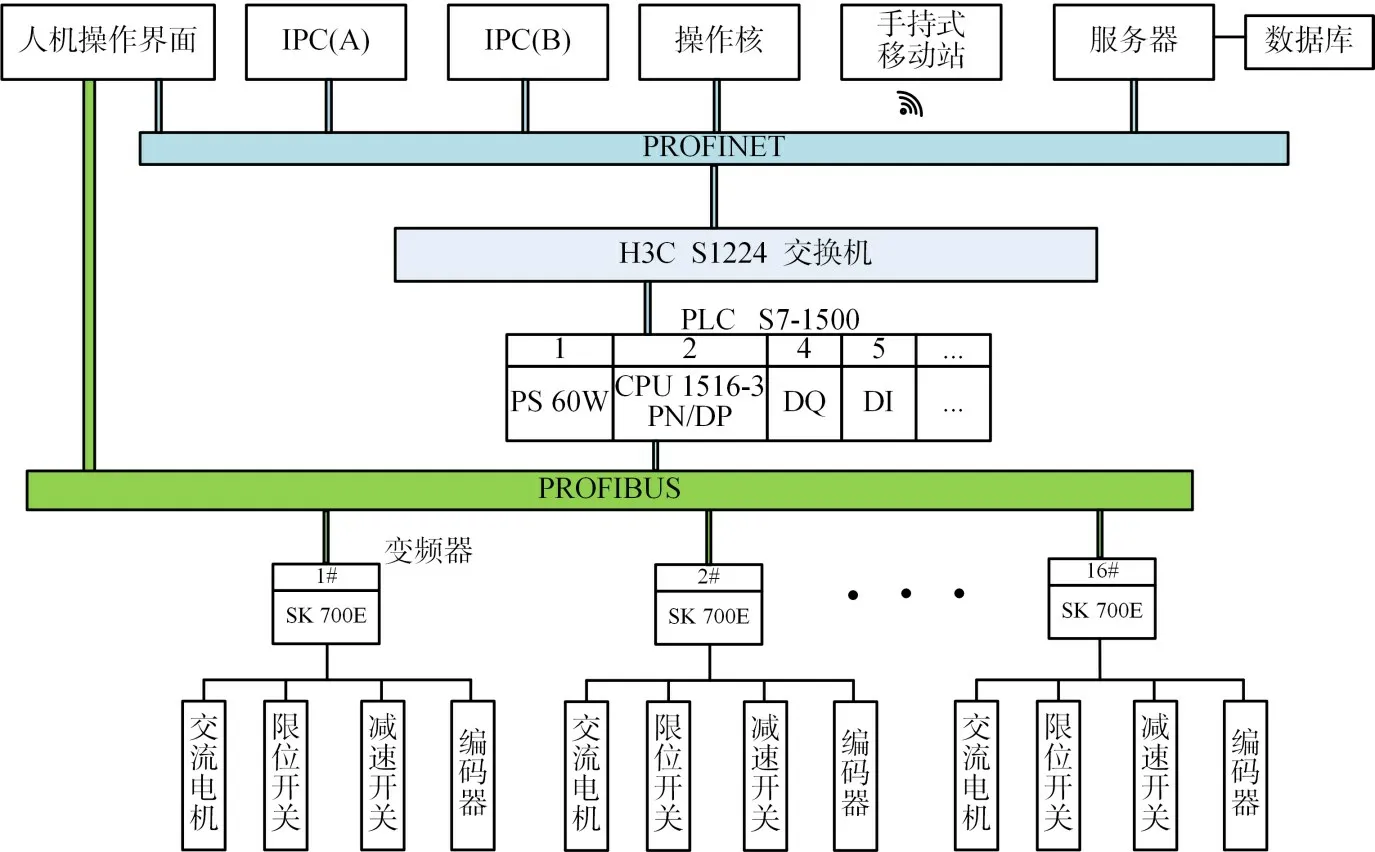
图2 系统硬件结构图
2.3 系统软件构成
为满足用户对舞台设备多平台实时远程监控的要求,搭建基于B/S 架构的远程监控系统[12],在.NET 平台上,基于WebService 技术再加上ASP.NET技术和html 技术实现了本系统的Web 应用模块,核心是IIS 服务器、FTP 服务器和云数据库服务器。系统软件软件主要包含Web 应用程序和数据库模块。
2.3.1 创建Web应用程序

图3 Web应用程序界面
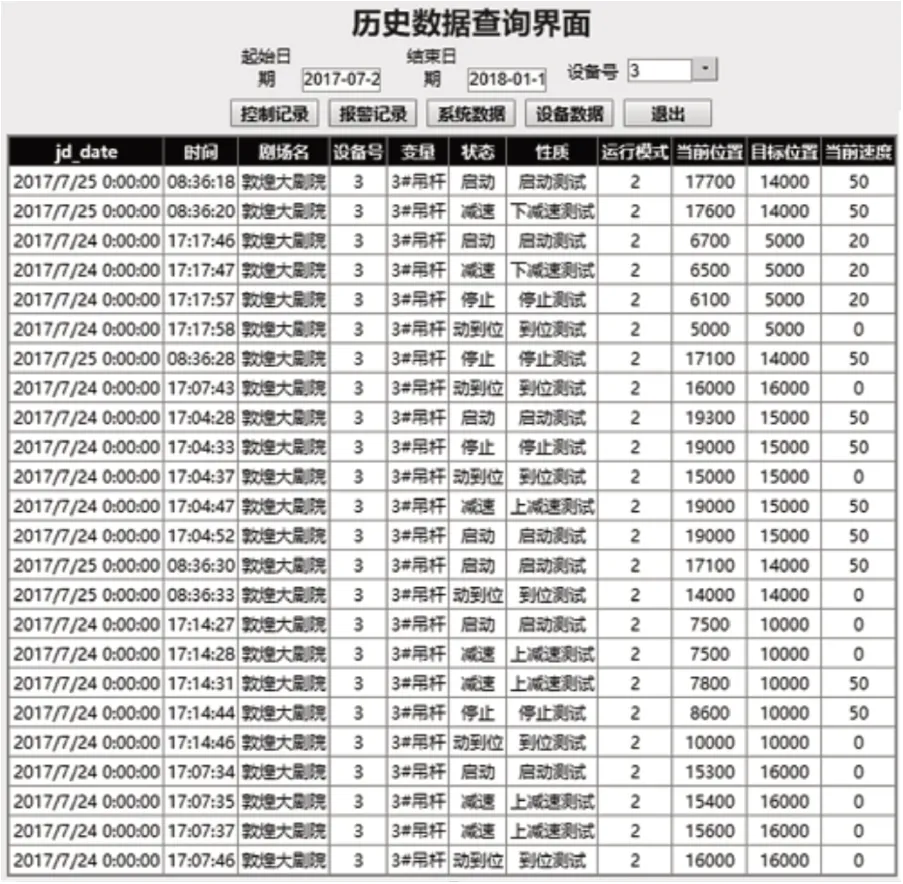
图4 历史数据查询界面
2.3.2 数据库设计
系统数据库包括本地数据库和云数据,两者的数据表和数据结构都是相同的,增加云数据库是为了防止本地数据库发生突发性事件时数据永久丢失。本地数据库依托关系型数据库SQL Server 建立,多表储存,扩展性好,SQL Server 2014 增加了内存数据库迁移,使得数据操作更快捷。云数据库便于本地数据迁移选择SQL Server 2016Web 版,云数据库数据表及数据如图5所示。

图5 云数据库数据表
数据表主要有用户信息表(UsersInfo)、设备运行表(shebei_nows)、功能表(controll)、设备表(De⁃vice)、临时指令表(TempCommand),主要数据字段有设备号(shebei_hao)、当前位置(ActualPosition)、目 标 位 置(TargetPosition)、当 前 速 度(Actual⁃Speed)、目标速度(TargetSpeed)、操作性质(di_xing⁃zhi)、操作状态(di_status)、模式(Mode)、开始位置(StartPosition)、停机位置(AfterPosition)等,其中控制字段主要是设备启停位、设备运行位置和速度等。
3 自抗扰控制器
3.1 自抗扰控制器设计
自抗扰控制器由跟踪微分器(Tracking Differ⁃entiator,TD)、扩张状态观测器(Extended State Ob⁃server,ESO)、非线性状态误差反馈控制率(Nonlin⁃ear State Error Feedback,NLSEF)三部分组成[13],其二阶控制结构如图6所示,输入为v0,输出为y。
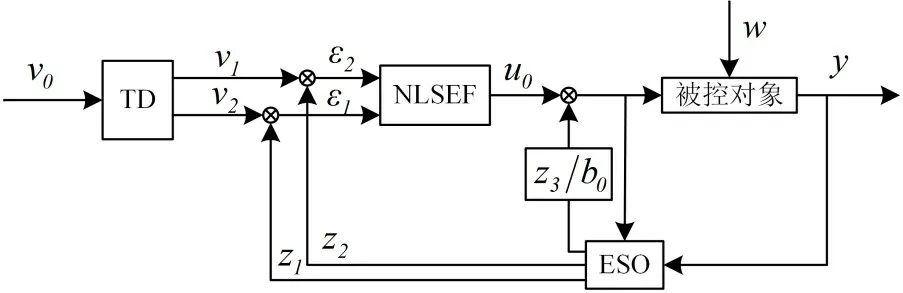
图6 自抗扰控制结构图
1)跟踪微分器
经典微分器是通过利用小时间常数的惯性环节来实现的,形式如下:
将期望理论运用于沙盘实训课以激发不生的学习热情,一是从效价考虑,即让学生理解沙盘实训课程给学生带来的价值。比如:收获知识、锻炼思维、获得好成绩、参加外出比赛的机会等;二是从期望值来考虑,即以上目标能够实现的可能性大小。

其中τ越小,系统输出的“噪声放大”就越严重,导致微分信号质量差,特别在离散实现中,其效果更差,故在PID 中一般不使用微分环节。跟踪微分器可以通过解微分方程得到微分信号,就可以跟踪输入信号的同事输出微分信号,这样就能有效解决PID 控制器的微分问题。本文选择跟踪微分器为最速跟踪微分器,即以最快的速度对输入信号v0进行跟踪,其数学表达式如下:
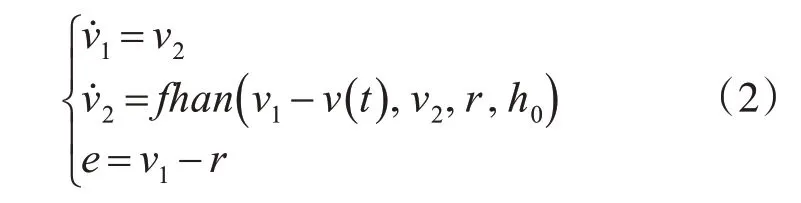
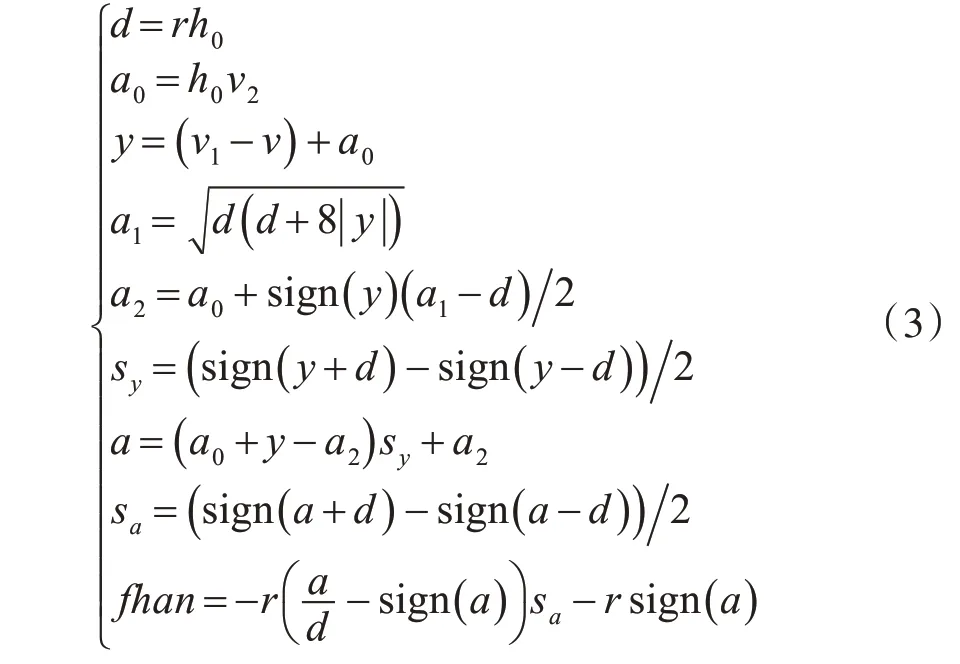
其中v1为输入信号v0的跟踪,v2为输入信号v0的微分,r为可调参数因子,其值的大小决定了TD 跟踪速度的快慢,h0为滤波因子,起对噪声的滤波作用,fhan为系统最速控制函数,表示如下:
跟踪微分器与传统PID 控制器相比,误差微分反馈增益选值范围变宽,所适应的对象范围变大,使系统的鲁棒性更好,稳定性更好。
2)扩张状态观测器
因为舞台控制系统为一个可观的系统,所以可利用扩张状态观测器将系统的外部干扰等因子扩张为一个新的状态变量。作为自抗扰控制器的核心,扩张状态观测器通过计算将状态变量估算出来后产生补偿量,然后将补偿量给控制信号。式(4)为二阶非线性系统:

其中u为扩张状态观测器的输入信号,把扰动量f(x1,x2)扩张为新的状态变量x3,其中x3=f(x1(t),x2(t)),即ẋ3=w(t),此时系统可被线性化为一个新的系统:
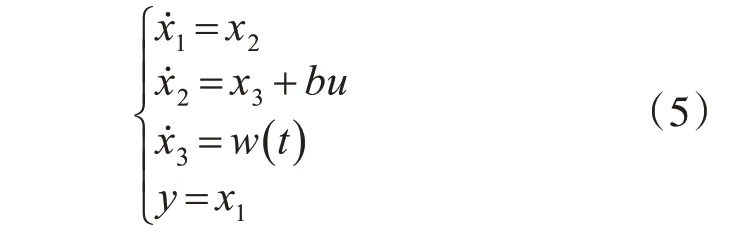
式(5)建立状态观测器,表示如下:
其中z1、z2、z3为新系统的状态变量x1、x2、x3的观测值,α1、α2、α3为非线性因子,β1、β2、β3为输出误差矫正增益,为扩张状态观测器的线性端长度,函数fal(e,α,δ)表达式为

3)非线性状态误差反馈率
在传统PID 控制器中对误差进行简单线性加权来实现控制量的输出,这种方式简单但效率较低[14],NLSEF 包括两个方面:一是非线性状态反馈,设计控制率;二是对扰动进行补偿。非线性误差反馈采取非线性的形式,式(8)为其表达式。
式(8)中k1,k2为非线性误差反馈率的组合,ρ为一组系数。
非线性反馈将非线性系统转化为线性系统,进行扰动补偿后,系统转换为一个线性双积分串联型控制系统,输出控制量为

3.2 自抗扰控制器参数整定
自抗扰控制器的参数比较多,需要对自抗扰控制器的TD、ESO、NLSEF 三个部分的所有参数都进行整定,并且这些参数之间相互联系,故比较复杂。可以利用分离性原理,先对TD 的参数进行整定,然后依次对ESO、NLSEF的参数进行整定[15]。
1)TD的参数整定
TD 的参数主要有可调参数因子r和滤波因子h0,可以先令h0和系统的采样时间相等,然后根据系统需要适当调节r,r越大系统的响应速度越快,但同时也会使系统的超调量增加,所以r不宜过大。
2)ESO的参数整定
扩张状态观测器参数较多,包括α、β、δ、b等,整定时要确保ESO能精确跟踪对象状态。可以先把输出与ESO连接起来,然后暂时将ESO的输出不接入到控制中,再调节输出误差矫正增益β,使得ESO 的输出跟踪上系统的值。最后将ESO 重新接入控制中,对参数进行调整。
3)NLSEF的参数整定
NLSEF要根据ESO的输出对扰动进行补偿,主要是根据b值的大小来对k1、k2进行整定。当b的值比较小时,k1、k2的取值应偏大;当b的值比较大时,k1、k2的取值应偏小。当比例增益k1取值比较大时,系统的响应速度会变快,同时震荡也会比变大;微分增益k2取值比较大时,可以抑制系统超调,但同时容易产生噪声。所以k1、k2的整定同PD控制器中P,D的整定。
4 仿真结果分析
以Matlab搭建实验平台,经对自抗扰控制器整定后的结果:TD 中的参数:r=5265,h0=0.0321;ESO 中的参数:α1=0.51,α2=0.25,β1=63,β2=890,β3=9000,δ=63,b=4063;NLSEF 中的参数:k1=0.01,k2=0.001。因为舞台设备的正常运行速度为0.8m/s。仿真时输入为阶跃信号,速度的设定值为800mm/s,仿真时间取10s。将基于传统PID和基于自抗扰控制器系统的仿真结果如图7、8所示。

图7 基于传统PID控制系统的仿真曲线
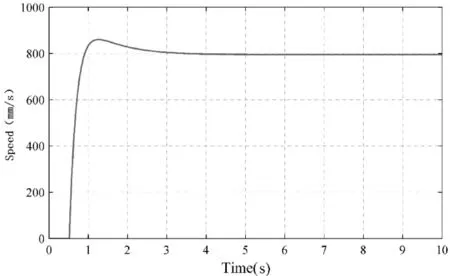
图8 基于自抗扰控制器系统的仿真曲线
由仿真结果可知,传统PID 控制系统的超调量为32.1%,调节时间ts约为3.9s。而基于自抗扰控制器的系统的超调量为5.9%,调节时间约为2.5s。通过两种控制方式系统动态性能的对比,可以明显看出,在同样的给定输入的状态下,基于自抗扰控制器的系统的响应时间更快、调节时间更短、超调量更小,系统的动态性能得到明显更优。
为了测试基于自抗扰控制器系统和基于传统PID 控制系统的抗干扰能力,在5.6s 时在分别在两个系统中各加入一个相同的脉冲干扰信号,得到如图9、图10所示的两个仿真结果。

图9 干扰下基于传统PID控制系统的仿真曲线
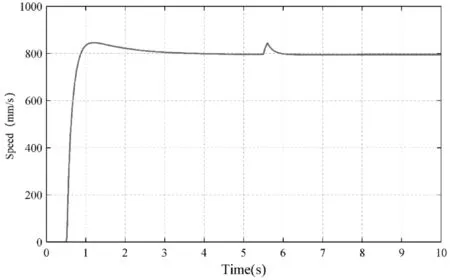
图10 干扰下基于自抗扰控制器系统的仿真曲线
由仿真结果知,在受到干扰后,基于传统PID控制系统的最大偏差为72,直到7.5s才达到稳定状态;而基于自抗扰控制器的系统的最大偏差为60,在6.1s时达到稳定状态。通过对比可以看出:在加入干扰后,二者都有一定的超调,但基于自抗扰控制器系统的超调相对小一些,而且再次回到稳定状态的时间也更短,故基于自抗扰控制器系统的抗干扰能力更强。
5 结语
首先在给定相同的输入后,对基于传统PID 控制器系统和基于自抗扰控制器系统的仿真结果进行对比,在此基础上给两个系统加入相同脉冲干扰信号后,再次对比仿真结果,可以明显看出,基于自抗扰控制器系统的动态性能明显优于基于PID 控制系统,其抗干扰能力也更强。目前此控制算法已应用于甘肃某舞台的设备远程监控系统的设备控制部分,取得良好的效果。这对于舞台控制设备的寿命以及人员的安全有着重要的意义。