基于模糊自适应PID 控制的智能配肥系统的设计与试验∗
2020-11-02代拥军骆东松武晓峰
代拥军 姜 浩 骆东松 武晓峰
(1.甘肃刘化(集团)有限责任公司 兰州 730030)(2.兰州理工大学电气工程与信息工程学院 兰州 730050)
1 引言
水肥一体化技术是一种集灌溉和施肥于一体的新型智能农业技术。根据土壤养分含量和作物种类对肥料的要求和特点,水肥一体化借助压力系统将可溶性肥料和水结合,并通过滴灌将混合肥料溶液送至作物根部区域,达到节水节肥和保证农产品质量的目的[1~3]。 其中,水肥一体化调控设备的设计和控制策略是实现智能施肥灌溉的关键[4~6]。
水肥一体化中的EC 值调控具有严重的非线性,循环管路等因素又增加了系统的时滞性。经典的PID控制方法很难满足水肥控制系统的要求[7-8]。袁洪波等[9]突出了EC 控制二阶滞后模型,其引入的混肥桶装置更增加了系统的滞后性,并且增加系统的复杂度。牛寅等[10]提出的轮灌条件下混肥模式中,其输入和输出均是和时间有关的函数,容易影响到长时滞情况下系统参数的整定,难以建立有效的系统数学模型和进行仿真。王海华等[11]采用分段的调控肥液EC 的模式,虽然在理论上进行了很透彻的分析,但目前只有仿真效果。李建安等[12]开发了一种基于脉宽调制的文丘里变量施肥装置,并采用模糊控制进一步电磁阀开度,减少了混肥的误差。
本文针对水肥一体化营养液调控过程中EC值的时滞、非线性以及大惯性的特点,提出一种模糊自适应PID 控制算法的EC 值调控策略。采用文丘里吸肥装置,结合整个水肥调控系统,建立模型分析EC 值控制策略;并设计基于STM32 的嵌入式控制器混肥装置进行实践,期望得到稳定的营养液可溶性盐浓度。
2 水肥调控系统
2.1 系统结构及原理
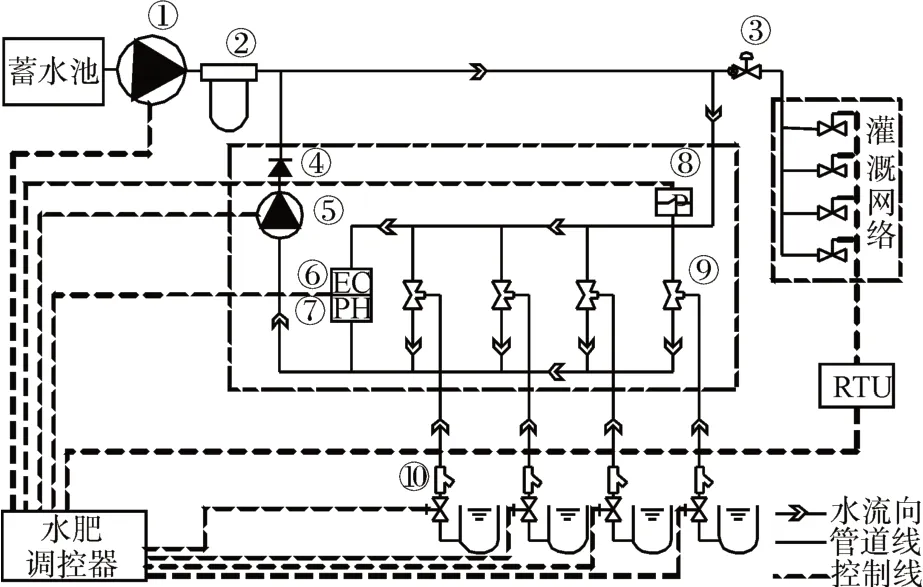
图1 水肥调控系统
水肥一体化系统的总体结构如图1 所示,包括水肥一体化设备、灌溉网络等部分组成。其中,水肥一体化设备由水肥调控器、增压泵、肥料和酸存储罐、水肥调控器管路、文丘里吸肥装置、EC 值传感器以及过滤器等装置组成;灌溉网络则是由灌溉管道和滴灌设备等部分组成。滴灌是一种高效的节水节肥的灌溉技术,其通过管道系统与安装在毛管上的灌水器,将作物需要的水分和养分一滴一滴,均匀而又缓慢地滴入作物根区土壤中,使作物根系区的土壤始终保持在最优含水的状态;其还可以将营养成分随着水分带到作物根部,完成施肥。为了保证灌溉网络部分各滴灌设备的压力和出水量相同,主管道上安装了恒压阀。而为了避免滴灌设备的堵塞,各进水口都必须安装过滤器。
肥液是由主管道的混合液与文丘里吸入的营养液进行混合而成的,通过增压泵的作用再流回主管道与主管道进水进行充分的混合,最后通过灌溉网络供应给作物,这样闭环控制的方式,有助于营养液的充分混合。EC 传感器实时检测流入灌溉网络的液体可溶性盐浓度,这样可以保证数据的真实性。控制系统采用STM32单片机作为主控制器,并选择模糊自适应PID 算法作为控制策略。主控制器根据EC 传感器检测到的EC 值,结合作物品种、作物长势和周围环境因子,动态调整营养液可溶性盐浓度,使实际灌溉EC 值达到作物生长时期最合适的EC 值。同时,为了调节营养液PH 值,设备还配备了相应的酸液罐。
2.2 营养液EC模型分析
针对水肥一体化营养液的调控,国内外研究人员进行了深入而广泛的研究。在前人研究的基础上,本文研究了基于EC值营养液的调控方法,认为营养液配制模型可以选择典型的一阶滞后模型。该过程可以被认为是分子中和过程,并且该过程的数学模型为设备管道中剩余的物质的量等于流入管道的物质的量减去流出管道的物质的量。列出其动态数学模型如下:

式中:VT为管道内混合液体体积;qI为流入管道液体流量;qo为流出管道液体流量;c(t)为混合完成后管道和出水管中肥液的浓度,c0为进水管中的肥液浓度,ci( )i=1,2,…4 为四条吸肥管路对应的母液的肥液浓度;Mi(t)(i=1,2,…4 )为五个吸肥管路的吸肥量。等式左边是管道中肥液质量的微分,右边表示进水管中肥液质量与文丘里吸收的各个母液的肥液质量之和减去出水管中肥液的质量。由于四个吸肥管路的吸肥量Mi(t)可以改成与电磁阀占空比有关的变量,表示为qwmi(t))1,2,…4 ,其中,qw为电磁阀占空比为100%文丘里的吸肥量;以及浓度与EC值成正比。式(1)可变为

其中e1、e2、e3、e4为四个混肥桶中母液的EC值。实际灌溉中,管道中肥液的体积一直保持不变,各吸肥管道使用的电磁阀、文丘里吸肥器、流量计等器件都是相同型号的。为了便于系统分析,假设每条吸肥管道上的吸肥情况是一样的,即4 通道中母液EC值和电磁阀控制占空比一致,式(2)可变为

由于系统在实际运行中有滞后,设滞后时间为τ,则由式(4)得到EC值的近似传递函数为

3 水肥调控方法设计与实现
3.1 模糊自适应PID控制系统的设计
水肥一体化营养液EC值控制系统硬件管路部分使用可以通过控制器的输出脉宽控制的比例电磁阀,其开度的大小控制吸肥的速度,进而可以控制混合液的EC 值。在实际的配肥过程中,因为EC值调控过程具有强烈的非线性,而且中和液在循环管道中的缓慢扩散具有一定的延迟和时滞型。当被控对象具有较强的时变性、非线性和滞后性,传统的PID 控制器在调整时会引起系统振荡和不稳定,控制效果表现不佳,难以取得良好的控制效果[13~15]。
控制器策略使用模糊自适应PID 控制方法,控制原理框图如图2 所示。r(s)为系统输入,e为系统输入与输出的差值,ec为对偏差求导的偏差变化率,u(s)为模糊自适应PID控制输出。

图2 模糊自适应PID控制系统结构图
误差e和误差变化率ec作为输入加到模糊控制器中,根据输入的模糊控制表将e和ec转化为模糊输入语言变量,再从模糊规则推导出模糊输出语言变量,最后通过去模糊处理输出精确地模糊输出量∆kp、∆ki和∆kd。
通过式(6)获得真正适于该模糊自适应PID 控制系统的参数kp(比例系数)、ki(积分系数)和kd(微分系数)。基于模糊自适应PID 控制的EC 值调控算法流程图如图3所示。

图3 基于模糊自适应PID控制的EC值调控算法流程图
3.2 定义输入语言变量
根据实际情况和仿真的要求,将EC 值的误差e和误差变化率ec作为模糊自适应PID 控制器的输入。定义模糊集上的域论:e={-3,-2,-1,0,1,2,3},ec={-3,-2,-1,0,1,2,3},对应的模糊子集为
E={负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}
Ec={负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}
3.3 定义输出语言变量
定义三个输出语言变量:比例系数调整参数∆kp、积分系数调整参数∆ki、微分系数调整参数∆kd。分别定义相应的模糊子集为
∆kp={负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}
∆ki={负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}
∆kd={负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}
3.4 规则表建立

表1 ∆kp 模糊控制规则表
根据专家知识和实际经验等从响应速度、系统稳定性、稳态误差和动态特性等方面来制定模糊控制规则。该模糊自适应PID 控制器的输入语言变量为e和ec,输出语言变量为∆kp、∆ki、∆kd,根据经验可归纳出相应模糊控制规则表。比例系数调整参数∆kp模糊控制规则表见表1、积分系数调整参数∆ki模糊控制规则表见表2、微分系数调整参数∆kd模糊控制规则表见表3。

表2 ∆ki 模糊控制规则表

表3 ∆kd 模糊控制规则表
4 仿真与验证
在实际试验中,根据实测数据,对式(5)中的参数进行取值,分别取滞后时间τ=5s,管道中肥液体积VT=40L,qw=0.03L/s,设备工作时出口压力为0.16MPa,qo=8L/s,肥液的浓度e1=20ms/cm。
在Simulink 中进行式(5)所示的一阶线性系统的仿真,得到图4、5。图4 为模糊自适应PID 控制模型,图5 为模糊自适应PID 控制的单位阶跃响应曲线。

图4 模糊自适应PID控制模型
5 结语
根据水肥一体化智能配肥系统的特点,根据实际的水肥一体化管道建立EC值调控的传递函数模型,为系统设计成功了模糊自适应PID 控制器,并在Simulink 中对智能配肥系统进行了模型的组建、参数整定和仿真调试。仿真结果表明:模糊自适应PID 控制器具有良好的动态和静态性能,可以有效地消除静差,减小超调等,将模糊自适应PID 控制算法应用在水肥一体化智能配肥系统中具有明显的优势。

图5 系统仿真曲线
本文提出了在智能配肥系统上实现模糊自适应PID 控制的设计方法和实际应用中的相关方法。该方法提高了控制系统可靠性,与传统的水肥一体化配肥系统相比更加精确,具有节约肥料、节约水资源和节省人力的作用。将该方法应用到水肥一体化控制中是现代农业发展的新方向和新趋势。