风浪环境下的舰船KT操纵响应模型研究
2020-10-31张炜灵
杨 波,张炜灵,蔡 烽,王 骁,霍 龙
(海军大连舰艇学院,辽宁 大连 116018)
0 引 言
舰船的操纵性研究不仅包括舰船自身的运动性能,还包括海洋环境和地形环境对其运动性能的影响[1]。随着舰船逐渐走向远海,舰船时常会在风浪环境下进行航行。由于航线以及任务的需要,尽管在一定风浪环境下,舰船仍需进行必要的操纵。此时,为了在安全的前提下圆满地完成任务,舰船在当前环境下能否进行特定的操纵,如何操纵才能取得理想的效果等问题日益突显。对于舰船在风浪环境下的操纵性能研究不仅能为操纵安全提供一定的理论基础,更能为舰船出色地发挥其各项性能提供保障。
船舶在风浪环境力作用下的操纵特性,已受到世界各国的普遍重视[2]。自从野本谦作[3]提出KT操纵响应模型以来,该模型在船舶操纵建模中得到广泛应用[4-8]。由于难以开展风浪环境下的水动力方面的研究,KT响应模型在风浪环境下的应用一直难以开展。本文借鉴Hirano[9]在三自由度MMG模型中直接加入二阶波浪力的建模方法,在KT响应模型最原始的推导过程中加入外力,构建出一个包含波浪力的操纵响应模型。
1 外力作用下的操纵响应模型
风浪环境对于舰船操纵性能的影响主要就在于其风浪环境对舰船会产生一定的外力,从而影响舰船的运动性能。
为了研究舰船在风浪环境下的运动性能,将外力引入到操纵响应模型中。由于操纵响应模型中的各项参数都是由水动力导数合成的,因此在方程中直接添加外力显然不现实。本文从操纵响应模型的推导过程出发,在最原始受力分析中添加外力,再参考其推导过程,构建出一个包含外力的操纵响应模型。

图1 外力示意图Fig. 1 External force diagram
假设外力在y方向的分力为Fy,对z轴的转矩为Nz,将其代入到操纵线性方程中,得到横移方程和首摇方程,表示为如下形式:

将式(2)整理后可得:

将式(3)和式(4)代入式(1),可得:

式中,涉及到的各项参数的表达式如下式:

T1,T2,T3,K和C的表达形式都和原始的KT模型相同[10]。增加的外力之后,最后导致方程中多了一项。外力的这种表达形式,可以称之为外力附加项。
2 波浪力的计算
波浪力对于舰船的影响主要分为2种:1)1阶波浪力。该波浪力由高频率小振幅且具有震荡特性的波浪引起。1阶波浪力主要影响舰船的垂荡和纵摇运动,对于操纵性运动相关的横漂和首摇的影响相对较小[11]。2)2阶波浪力。该波浪力主要和波浪的频率相关,会引起舰船航行时航向和轨迹的变化。因此,本文在定量计算时,主要考虑2阶波浪力对于舰船的操纵性能的影响。
波浪漂移力和力矩的按照如下公式进行计算[11]:

根据船模试验的结果,漂移力系数和力矩系数有如下回归公式:

3 风浪环境下的舰船KT操纵响应模型
将风浪力作为外力进行代入,构建出一个风浪环境下的操纵响应模型,结果如下式:

模型中涉及到的水动力导数按照下式进行计算:
4 模型验证
利用式(14)和式(15),将舰船的船型数据代入,计算得到舰船的各项水动力导数和附加质量。在初始遭遇角为30°时,针对波高为0 m,1.5 m,3 m和5 m的海况,仿真预报舰船Z形试验受到的波浪力曲线、航向角曲线以及舰船的轨迹线,结果如图2~图5所示。
从仿真结果来看,舰船在进行Z形试验时,由于来回操舵,舰船的波浪遭遇角会发随着航向角的变化而变化,舰船受到的波浪力也会随着出现一定的波动。从波浪力的变化趋势上,仿真结果和实际情况十分相符。
为了观察舰船在风浪环境下,不同航速和不同舵角情况下的操纵性能,本文在3 m浪高,初始遭遇浪向角为30°的环境下,仿真10°舵角下,不同航速的舰船旋回轨迹和旋回角速度曲线,结果如图6~图9所示。
在3 m浪高,初始遭遇浪向角为30°的环境下,舰船航速为15 kn,5°,10°和15°舵角下的旋回轨迹和角速度曲线如图10~图13所示。
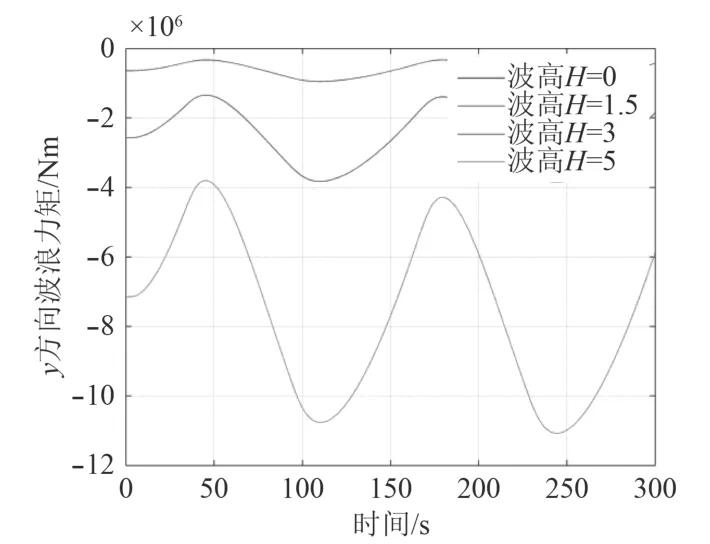
图2 y方向上的波浪漂移力变化曲线Fig. 2 Wave drift force curve in the y direction

图3 z方向上的波浪漂移力矩变化曲线Fig. 3 Wave drift torque curve in the z direction

图4 不同浪高下航向角变化曲线Fig. 4 Heading angle variation curve at different wave heights

图5 不同浪高下的轨迹线Fig. 5 Trajectory under different wave heights

图6 10 kn航速下的旋回轨迹线Fig. 6 Cycle track at 10 kn

图7 15 kn航速下的旋回轨迹线Fig. 7 Cycle track at 15 kn

图8 20 kn航速下的旋回轨迹线Fig. 8 Cycle track at 20 kn
从图中可见,舰船在风浪环境下的航速越小,操舵舵角越小,舰船的旋回角速度越小,角速度波动相对平缓,但舰船的旋回圈往外偏移越大,风浪对舰船的旋回圈影响越大。舰船的航速越大,操舵舵角越大,舰船的旋回角速度越大,角速度波动越剧烈,但舰船的旋回圈越密集,风浪对舰船的旋回圈的影响越小。

图9 不同航速下的角速度曲线Fig. 9 Angular velocity curve at different speeds
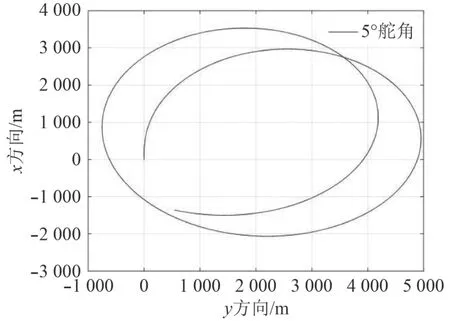
图10 10°舵角下的旋回轨迹线Fig. 10 Rotational trajectory at 10° rudder angle

图11 15°舵角下的旋回轨迹线Fig. 11 Rotational trajectory at 15° rudder angle

图12 20°舵角下的旋回轨迹线Fig. 12 Rotational trajectory at 20° rudder angle

图13 不同舵角下的角速度曲线Fig. 13 Angular velocity curve at different rudder angles
5 结 语
本文将波浪力以外力的形式引入操纵响应模型的推导过程中,构建了包含波浪外力的操纵响应运动模型。
通过对舰船的Z形试验和旋回试验的仿真,证明模型的有效性。通过在不同浪高的环境下,对舰船进行Z形仿真,分析不同的浪高对舰船航行的影响;通过对不同的航速和舵角情况下,对舰船进行旋回仿真,分析不同的操纵情况下风浪环境对舰船操纵性能的影响,对风浪环境下的舰船操纵有一定的参考价值。