一种新型水下搜索模拟系统设计与仿真
2020-10-31赵科莉邓烈威张德洋欧阳帅捷
赵科莉,李 奔,邓烈威,张德洋,欧阳帅捷
(1. 中国船舶工业系统工程研究院,北京 100094;2. 中国船舶集团公司第七一四研究所,北京 100101)
0 引 言
水下搜索作战主要目标是在遂行其他作战任务情况下,确保高价值目标水下安全[1-2]。潜艇的隐蔽性能好、打击能力强向来是水面舰艇的巨大威胁,如何提高对潜作战效能,提高水下搜索群发现概率,缩短发现时间是水下搜索作战亟待解决的重要课题[3]。水下搜索作战涉及到包括水面舰艇、直升机和潜艇等多兵种之间多传感器多武器的协同和对抗,十分复杂[4]。水介质的复杂性也给水下搜索带来了很大困难,水下搜索设备的性能、可靠性等指标均受到很大影响。因此,以提升水下搜索群发现概率,缩短发现时间为目标,研究水下搜索群兵力配置、传感器性能指标和工作模式等影响因素对水下搜索群发现概率和发现时间所作的贡献,解决水下搜索的瓶颈问题显得尤为重要。
本文设计并实现了一种支持水下搜索群兵力阵位部署、参数配置和能力评估的新型水下搜索模拟系统,该系统的设计目标是通过数字化仿真方法,研究传感器探测范围、飞机点水间隔以及阵位间距等因素对水下搜索群发现概率和发现时间的影响。系统完成了功能设计,并通过建立水下搜索群兵力的传感器模型、运动模型以及能力评估模型,模拟了基于水下搜索平台之间的信息交互和互联互通的对水下搜索活动,得到了水下搜索群发现概率和发现时间随传感器探测范围、飞机点水间隔以及阵位间距变化的动态结果。
1 水下搜索模拟系统设计
水下搜索模拟系统主要通过数字化仿真手段,开展水下搜索模拟系统水下搜索兵力的要素模型、运动模型以及能力评估模型设计,实现舰机协同水下搜索

图1 系统架构Fig. 1 System structure
条件下的水下搜索群发现概率指标分析,研究传感器探测范围、飞机点水间隔以及阵位间距对水下搜索发现概率的影响。按照支撑层、模型层、应用层的3层架构进行模拟系统的构建,支撑层是底层运行环境,支撑系统运行的操作系统、通信网络和硬件设备,模型层为支撑模拟系统运行的引擎、工具和模型库,应用层为直接面向使用者,包括想定编辑系统、导调干预系统和能力评估系统,系统架构如图1所示。水下搜索群兵力通常在指定区域建立拦截巡逻线阻止敌潜艇进入,提供水下搜索警戒[2,5]。本文水下搜索模拟系统水下搜索群兵力构成为4艘水面舰艇仿真节点和4架舰载水下搜索直升机仿真节点,对方构成为4艘核潜艇仿真节点。其中,4艘水面舰艇仿真节点均配置1型拖曳声呐和1型舰壳声呐,4架舰载水下搜索直升机仿真节点均配置1型吊放声呐,4艘核潜艇仿真节点均配置1型拖曳声呐和1型舰首声呐,系统组成图如图2所示。
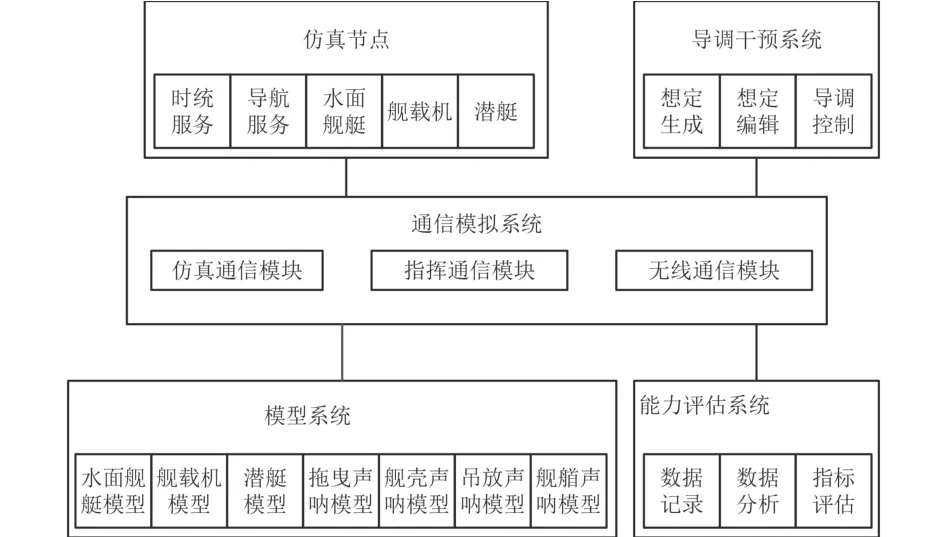
图2 系统组成Fig. 2 System composition
1.1 系统功能设计
水下搜索模拟系统主要具备想定编辑和推演、导调干预和能力评估等功能。系统支持仿真想定编辑、动态调整和人不在回路的自动推演;支持传感器参数动态配置;支持飞机点水间隔动态调整;支持水下搜索群兵力阵位动态调整;支持敌潜艇临机调整下潜深度、航速和航向;支持水下搜索群发现概率和发现时间等能力评估。
1.2 传感器模型设计
传感器模型设计主要考虑传感器的探测范围、探测方位、发现概率、工作周期等参数。同时,考虑敌方潜艇下潜深度以及敌方潜艇航速对传感器探测范围和发现概率的影响。当蓝方潜艇发现我方兵力后,潜艇随机增加潜深或者降低航速,同时我方声呐探测范围降低,并且发现概率变小。
1.3 运动模型设计
初始状态下,4艘水面舰艇和4架水下搜索直升机根据阵形设置分布在指定区域。实际推演时,水面舰艇作往复运动,平均速度v舰艇,往返距离D舰艇往返,水下搜索直升机采用点水探测样式作往复运动,平均速度v飞机,点水间距D点水,点水周期D点水周期,飞机飞行速度v飞机,往返距离D飞机往返,各平台机动一致(同时顺时针或逆时针)。敌潜艇部署于指定区域的4个方向,以初始速度v敌潜艇,向指定区域中心机动。
1.4 能力评估模型设计
现代潜艇以其优良的静音性、隐蔽性,对水下区域构成的威胁日益严峻[6-8]。在水下搜索作战中,对潜艇的发现变得越来越难。随着计算机技术的发展,作战模拟已经发展成为现代海军作战效能分析的最基本方法[9],它的优点在于能够在考虑对抗的条件下,以具体作战环境和一定兵力编成背景来评价效能[10]。本文采用多次仿真模拟的方法,重点研究传感器探测范围、飞机点水间隔以及搜索兵力阵位间距对水下搜索群发现概率和发现时间的影响。水下搜索群发现概率的定义为:在水下搜索群兵力对水下探测能力覆盖范围内,当出现水下目标时,水下搜索群兵力能够探测并识别出水下目标的概率。水下搜索群发现时间的定义为:在水下搜索群兵力对水下探测能力覆盖范围内,从仿真开始到水下搜索群兵力首次探测并识别出水下目标的时间。。敌潜艇个数为
2 水下搜索模拟系统仿真
2.1 典型阵位部署
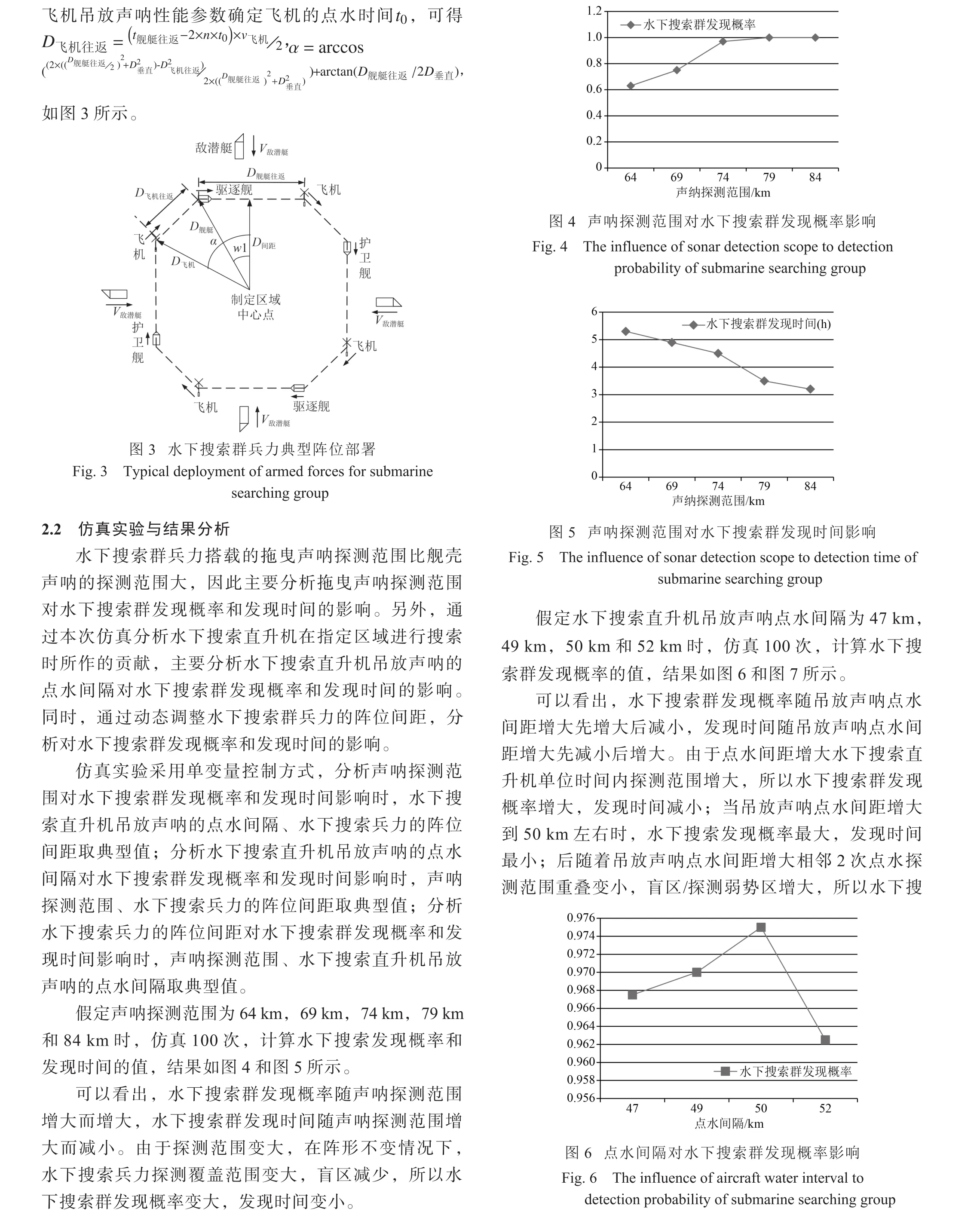
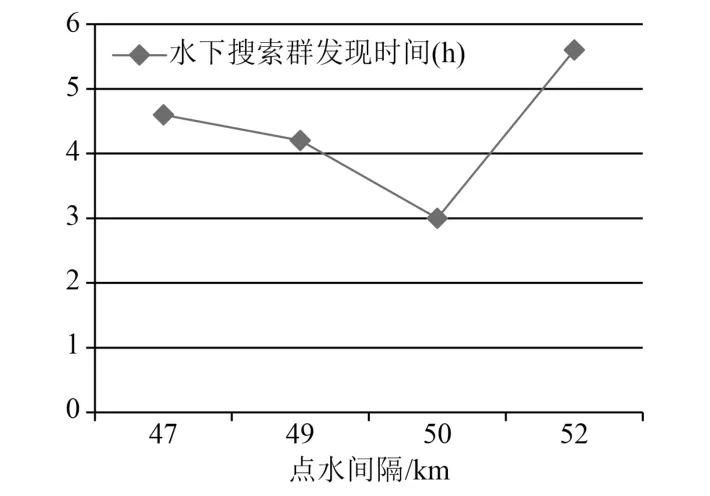
图7 点水间隔对水下搜索群发现时间影响Fig. 7 the influence of aircraft water interval to detection time of submarine searching group
假定水下搜索兵力的阵位间距为67 km,72 km,77 km,82 km和87 km时,仿真100次,计算水下搜索发现概率的值,结果如图8和图9所示。
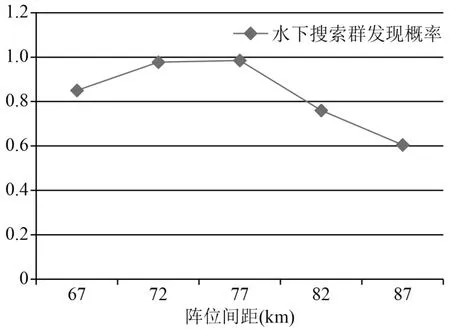
图8 阵位间距对水下搜索群发现概率影响Fig. 8 the influence of position space to detection probability of submarine searching group
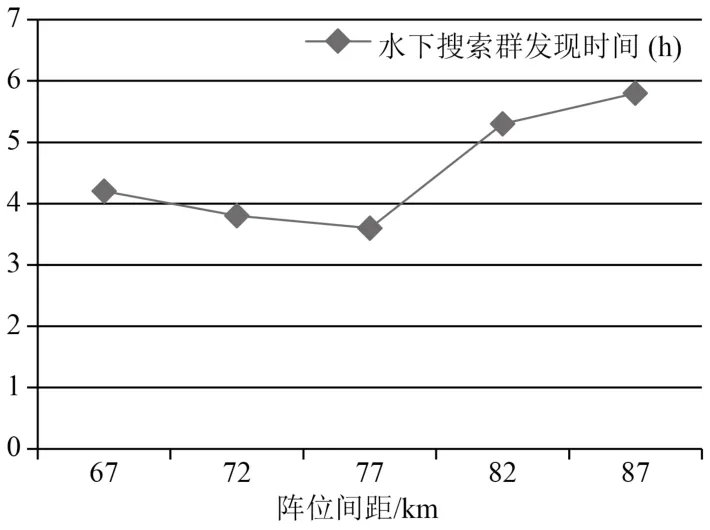
图9 阵位间距对水下搜索群发现时间影响Fig. 9 the influence of position space to detection time of submarine searching group
可以看出,水下搜索群发现概率随着阵位间距增大先变大后变小,水下搜索群发现时间随着阵位间距增大先变小后增大,阵位部署为77 km时,水下搜索群发现概率达到最大值,发现时间最小,由于阵位间距为77 km时,水下搜索兵力刚好能够相成严密的对潜警戒探测圈,所以水下搜索发现概率最大,发现时间最小;阵位部署继续增大时,水下搜索兵力的有效探测范围占比变小,探测盲区增大,敌潜艇突破水下搜索兵力的探测圈概率增大,所以水下搜索群发现概率降低,发现时间升高。
3 结 语
本文实现了指定区域水下搜索模拟系统的设计与仿真,综合考虑敌潜艇下潜深度以及敌潜艇航速对传感器探测范围和发现概率的影响,通过建立较为真实的仿真节点、传感器、运动规则以及能力评估模型,配置合理的水下搜索兵力阵位部署,完成了声呐探测范围、吊放声呐点水间隔以及阵位间距对水下搜索群发现概率和发现时间的影响的定量和定性分析,发现时间随着发现概率变化逆向变化,验证了系统的可行性。